Tercera Mano Robótica es un kit de fuente abierta cuyas piezas se pueden imprimir en una impresora 3D y que se puede usar en el antebrazo utilizando un Trinket Pro como cerebro
Trinket es una versión reducida de un Arduino con un ATmega328 y de coste reducido, pero obviamente puede usarse cualquier placa que sea compatible con Arduino
Cuando se le solicite, puede entregarle una herramienta que tenga, liberándolo de buscarlo o perderlo todo ello pulsando un único pulsador que Tim (su creador) ha colocado estratégicamente en un dedo gracias a una pieza similar a un anillo impresa también en 3d
En realidad son pocos componentes los usados en este proyecto:
- 1x9g servo hobby barato
- Trinket Pro 5V
- Cargador de batería de litio de celda única (3.7V) alimentado a 5V
- Batería de 300mAH celda única LiPO
- imanes – 5/16 «de diámetro, 1.8» de espesor
- 13 × 2-56 tornillos
- 1 × piezas impresas en 3D
- Banda de cintura elástica ancha 1 × 1 «
Después de reunir todos los elementos en la lista de componentes e imprimir sus piezas, ¡es hora de comenzar el ensamblaje y conectarlo todo!
Aquí está el diagrama de conexión:
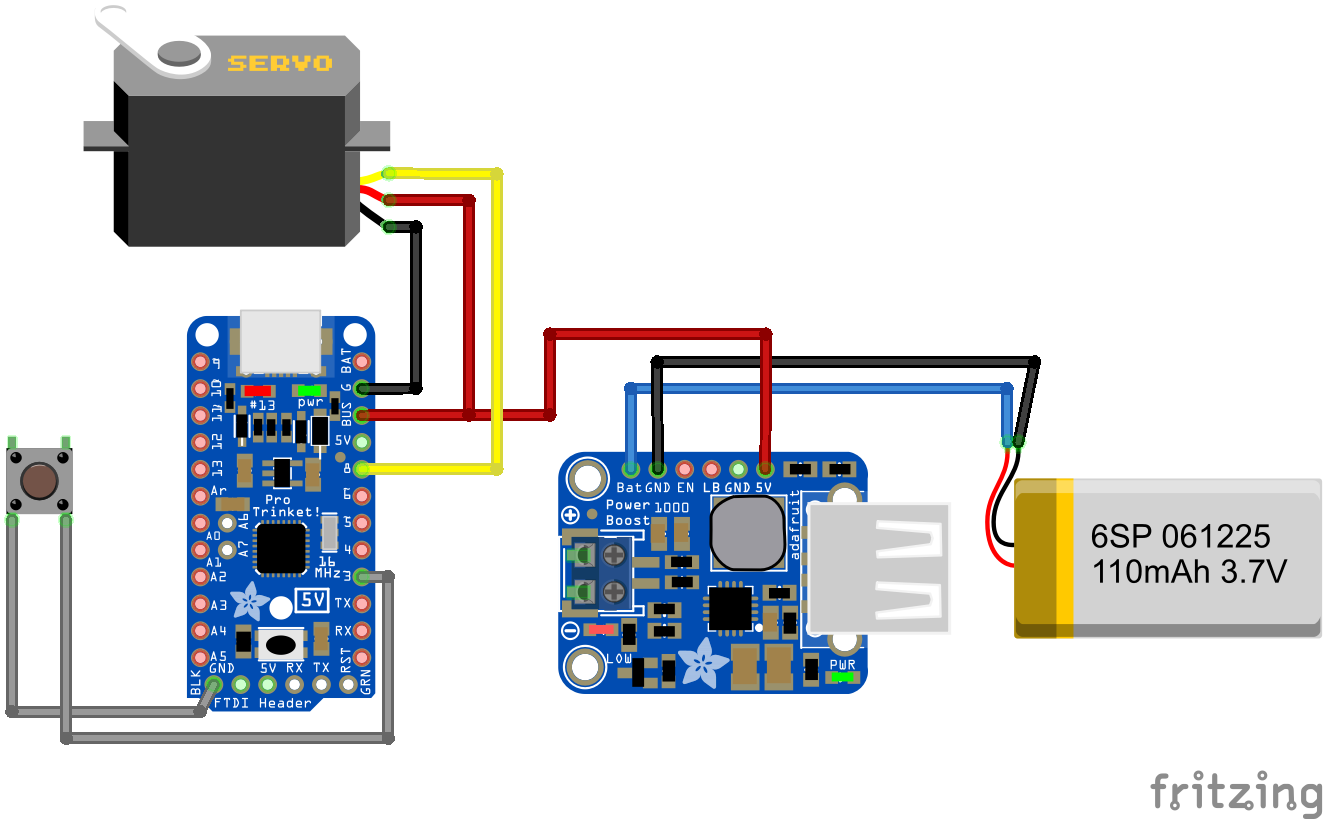
Es bastante simple pues se limita a conectar la placa a un servo controlado por el puerto digital nº8 y que ira alimentando a la salida del cargador a 5v DC y un pulsador que conectaremos al pin 3 y masa .
El resto es simplemente la parte de carga de la batería que se conectará por un lado a la batería y por otro lado tanto al servo como a la placa de control .
Puesto que la alimentación es suministrada por la batería se recomienda colocar un interruptor en la batería para impedir su descarga cuando no se esta usando.
Aquí está el código para hacer su movimiento robótico de tercera mano:
// ThirdHand test script // by Tim Giles <www.wildcircuits.com> //servo is on Pin8 //button is on Pin3 and has the pullup enabled #include Servo ServoA; int Angle = 10; int AngleClosed = 10; int AngleOpen = 120; void setup() { ServoA.attach(8); pinMode(3,INPUT_PULLUP); } void loop() { //update the servo position ServoA.write(Angle); delay(1); //check if the button is pushed if (digitalRead(3) == 0) { //debounce while (digitalRead(3) == 0){ delay(1); } //set the servo to it's open position Angle = AngleOpen; ServoA.write(Angle); //hold the servo in this position to give the user time //to grab the screwdriver delay(2000); //set the servo to it's closed position Angle = AngleClosed; ServoA.write(Angle); } }
Durante la programación se recomienda desconectar la batería pues de lo contrario, el suministro de refuerzo de 5 V volverá a alimentar su ordenador y puede generar efectos negativos
Si su cable USB que está programando es demasiado largo / demasiado débil, es posible que tenga un comportamiento extraño cuando termine la programación y el servo intente moverse:esto se debe a una caída de voltaje excesiva en el cable USB que hace que el Trinket Pro se reinicie cuando el servo intenta moverse.
PIEZAS IMPRESAS EN 3D
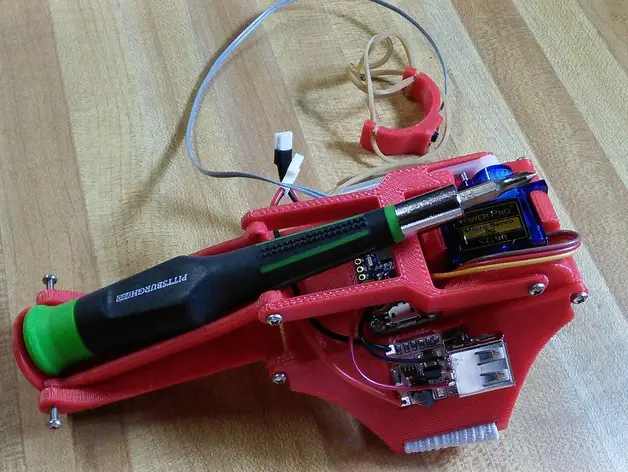
La base , el bazo articulado así como el anillo para el pulsador se han realizado impresas en 3D
Los ficheros están disponibles como no en el repositorio Thingiverse en la url https://www.thingiverse.com/thing:618811
Mientras ensambla las piezas impresas en 3D, notará que todos los orificios de los tornillos son ligeramente más pequeños o de mayor tamaño.
Los tornillos 2-56 se ensartarán automáticamente en los orificios de menor tamaño y girarán libremente en los orificios de mayor tamaño, lo cual permite que el tornillo sujete firmemente la bandeja del destornillador mientras que el brazo que acciona la bandeja del destornillador se puede mover libremente.Si sus piezas no van juntas así, entonces necesitará ajustar su impresora o ajustar el tamaño de los orificios de los tornillos.
Fuente hackaday.io