Hoy todo el mundo tiene un Wi-Fi (WLAN)-router en casa conectado a Internet. Por lo tanto, parece natural para supervisar y controlar el robot Automower a través de la interfaz de radio WLAN: esto es ahora posible!
La base de hardware de la WLAN-Modul es un mini router «Fonera 2.0», tipo 2200 o 2100. Los routers se han distribuido por cientos de miles a través de la «red FON comunidad» hasta 2008, ver http://fr.wikipedia.org/wiki/FON . Es muy fácil de encontrar en una tienda de segunda mano (ebay …)
El router Fonera se integrará dentro del robot Automower, ya sea bajo el teclado robot como en el siguiente video o cerca de la rueda derecha. Será completamente protegido del calor lluvia, la suciedad y también. Debido a su antena WiFi externo, tiene un alcance de radio muy bueno para bajo consumo de energía: 3W 150mA a 20V es aceptable en comparación con 27W consumidos por el robot en el trabajo.
Basta con echar un vistazo al siguiente video para ver lo fácil que es configurar la interfaz en pocos minutos:
[youtube=http://www.youtube.com/watch?v=huHVhhP59dA&w=736&h=480]
La pequeña caja redonda gris la imagen siguiente es la fuente de alimentación de la fonera que está conectado con el robot a través del conector blanco de la placa madre (esta conexión es totalmente equivalente al puerto serie externo en el botom del robot, pero el conector aquí en la placa madre tiene una mejor protección contra el polvo y la humedad):
Si lo desea, también puede poner la fonera bajo el capó verde, cerca del botón de parada, de esta manera sigue siendo accesible y también se puede ver a los pequeños leds verdes por el poder y WLAN.
Para aquellos que quieren poner la fonera en la parte delantera del robot, también es posible:
Para la parte de software, todo funciona ahora como si el robot sería un elemento de la red IP. Esto significa que el robot será accesible a través de su propia dirección IP y un puerto específico en IP que se enlaza a su interfaz de serie. Por tanto, el robot se hace accesible desde cualquier lugar! Desde un PC local en el país, desde una PDA, un teléfono inteligente conectado a Internet en el otro extremo del planeta!
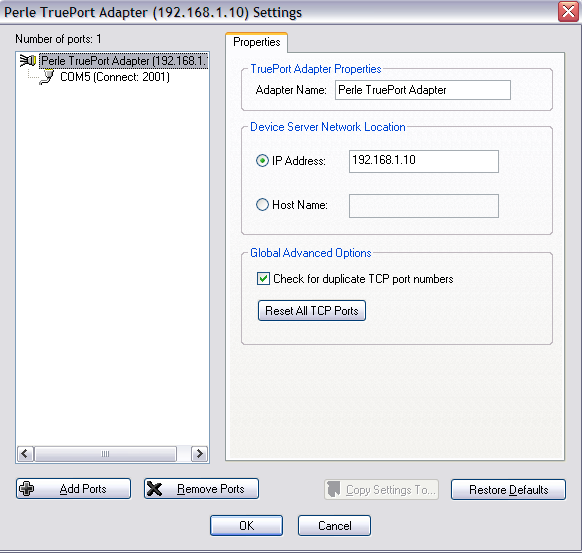
Vamos a empezar con el caso más simple: un seguimiento directo del robot a través de un PC local en el país. Para utilizar PC-software que controla el robot a través de una interfaz serial real, sólo tenemos que instalar el software gratuito Puerto Perle Verdadero.
Este software emula un puerto serie del PC local. Está disponible para sistemas Windows y Linux. Este puerto serie virtual será el puerto en serie del robot exactamente como si el robot se conecta directamente al PC a través de un cable serie local. En la configuración, sólo será necesario indicar la IP robots (en este caso 192.168.1.10 en el exemple) y el IP-puerto (2001).


Tan pronto como el puerto serie virtual se establece (aquí COM5), se puede probar el enlace con el robot a través de un pequeño software que muestra la temperatura y la tensión de la batería. También es posible dar algunas órdenes al robot, por ejemplo, «ir a casa!» o «ir a trabajar». Este es el ejemplo más simple de control del robot. Por supuesto, también puede controlar el robot en tiempo real si tienes una webcam fija en el robot, vea este video:http://www.youtube.com/watch?v=MqIHruVACj0 .
En lugar de verdadero puerto Perle, también puede utilizar el software libre . HW VSP3 En ese caso la configuración es aún más fácil, sólo tiene que indicar la dirección IP (192.168.1.200 en el ejemplo siguiente) y el puerto IP (2001):
Una tercera posibilidad libre e incluso con más funciones potentes parece ser EMULADOR VIRTUAL SERIAL PORT de Eterlogic, pero yo no lo he probado.
Más información aqui
solo-electronicos por Carlos Rodriguez Navarro se encuentra bajo una Licencia Creative Commons Atribución-NoComercial-CompartirIgual 3.0 Unported.