
En el impulso por desarrollar sistemas robóticos que puedan sentir e interactuar con su entorno, se han realizado enormes inversiones en visión artificial. Hemos visto los frutos de estas inversiones en una amplia gama de aplicaciones, desde automóviles autónomos hasta la automatización de robots industriales. Si bien estos esfuerzos han tenido mucho éxito, los sensores ópticos no son la solución ideal para todos los casos de uso. Las tareas de manipulación de objetos, por ejemplo, suelen requerir información táctil para manipular con precisión y seguridad los objetos de interés. Puede imaginar un enfoque híbrido en el que los métodos de visión por computadora localicen el objeto y dirijan un robot a la posición correcta. A partir de ahí, los sensores táctiles dentro de una mano robótica brindan información sobre la fragilidad o robustez del objeto y ayudan a crear un plan para llevar a cabo las intenciones del robot.
En comparación con la visión por computadora, se ha dedicado mucha menos atención al desarrollo de sensores táctiles, lo que los hace generalmente menos sofisticados que sus contrapartes ópticas. Esto ha dificultado el desarrollo de robots que sean capaces de generar una comprensión de alta resolución de su entorno mediante la integración de datos de múltiples tipos de sensores.
En un esfuerzo por comenzar a abordar las deficiencias en la tecnología de detección táctil actual, un equipo de ingenieros de ETH Zürich ha desarrollado un dispositivo que llaman SmartHand .
SmartHand es un sistema integrado de hardware y software creado para recopilar y procesar información táctil de alta resolución de una matriz de sensores múltiples en forma de mano en tiempo real.
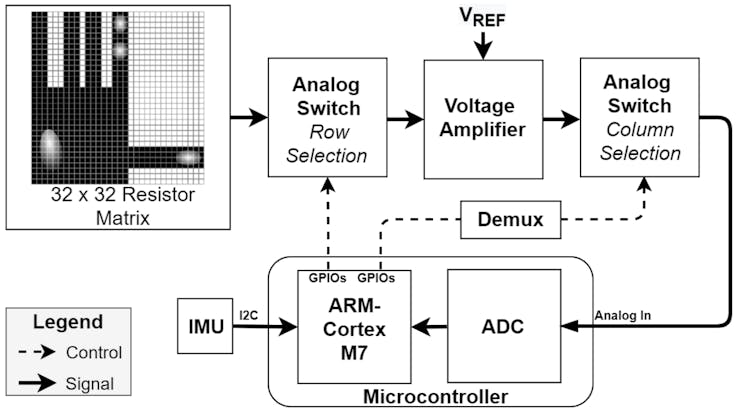
Arquitectura del sistema (📷: X. Wang et al.)
El dispositivo SmartHand utiliza una rejilla sensora táctil resistiva de bajo costo, basada en un compuesto de polímero conductor, que se pega a un guante. Se adjunta una unidad de medición inercial (IMU) en la parte posterior del guante para proporcionar información adicional sobre el movimiento. Los datos de los 1024 sensores táctiles (dispuestos en una cuadrícula de 32 por 32) y la IMU se introducen en una placa de descubrimiento STM32F769NI conectada a la muñeca a través de una serie de cables. Esta placa contiene un núcleo Arm Cortex-M7 que funciona a 216 MHz, con 2 MB de memoria flash y 532 kB de RAM.
Para demostrar SmartHand, los investigadores querían poder detectar qué tipo de objeto sostenía la mano. Para ello, se creó y entrenó una red neuronal convolucional, basada en la arquitectura ResNet-18, para reconocer la relación entre los datos de los sensores y un conjunto de dieciséis objetos cotidianos. Se creó un conjunto de datos usando el dispositivo físico para que sirviera como datos de entrenamiento para el modelo. Recopilando mediciones a 100 cuadros por segundo (13,7 veces más rápido que el trabajo anterior), se generó un conjunto de datos táctiles que consta de 340.000 cuadros.
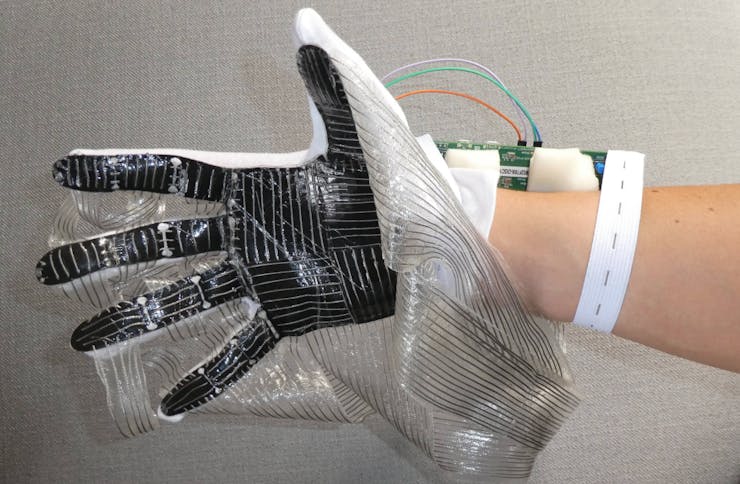
La red de sensores (📷: X. Wang et al.)
Al validar la red neuronal, se encontró que el modelo requiere un orden de magnitud menos de memoria y 15,6 veces menos cálculos, en comparación con los dispositivos actuales. Esto se logró manteniendo la red neuronal lo más compacta posible, sin sacrificar la precisión de las predicciones. Hablando de predicciones, se encontró que la precisión de clasificación top 1 del modelo alcanzó el 98,86% en el reconocimiento de objetos. Al mantener el procesamiento en el límite, el tiempo de inferencia se mantuvo en unos muy razonables 100 milisegundos.
Se observó que, debido a las propiedades inherentes de los materiales que componen la rejilla del sensor táctil, habrá cierto nivel de degradación con el uso repetido. Los primeros indicios sugieren que la degradación puede estabilizarse, lo que permitiría recalibrar el diseño actual después de un período de rodaje inicial sin ningún otro cambio. Actualmente están evaluando si este es el caso, o si la degradación del sensor continúa más allá de la meseta aparente, lo que requeriría más cambios de diseño antes de que sea posible el uso del dispositivo en el mundo real.
El equipo prevé que las técnicas de SmartHand se utilicen en futuras aplicaciones robóticas y protésicas de manos. Con un poco más de esfuerzo, este trabajo puede acercarnos a un mundo en el que los robots no parecen tan robóticos.
Fuente hackester.io

Deja un comentario