Kemal Ficici nos demuestra con su proyecto escrito en python, que por cierto ha publicado con su código completo en github, como es posible usando la librería OpenCv construir un detector de carril que incluso maneja carriles con curvas.
A pesar del gran avance , sin embargo el autor reconoce que la salida de su sistema todavía se ve afectada por sombras y drásticos cambios en la textura de la carretera lo cual invalida en gran parte su resultado , lo cual le hace pensar en futuras actualizaciones de su proyecto haciendo uso de técnicas de aprendizaje automático para llegar a desarrollar un sistema de detección de vehículo e increíblemente robusto carril.
En el siguiente video podemos ver el resultado de su trabajo:
En cualquier escenario de conducción, las líneas de carril son un componente esencial de lo que indica el flujo de tráfico y donde se debe conducir un vehículo así que también es un buen punto de partida en el desarrollo de niveles de automatismos de ayuda a la conducción ( Sistemas ADAS).
En un proyecto anterior de detección de carril Kemal había implementado un sistema de detección de carril que funcionaba decentemente en perfectas condiciones, sin embargo no detectaba curvas carriles con precisión y no era robusta a obstrucciones y sombras, de modo que esta nueva versión mejora su primera propuesta puesto que ha implementado detección de lineas curvas en los carriles , de modo que funciona mucho mejor y es más robusto para entornos exigentes.
El sistema de detección de carril ha sido escrito en Python usando la librería OpenCV y ha seguido resumidamente las siguientes etapas en el procesamiento de imagen:
- Corrección de distorsión
- Deformación de la perspectiva
- Filtro de Sobel
- Detección de picos del histograma
- Búsqueda de ventana deslizante
- Ajuste de curvas
- Superposición de carril detectado
- Aplicar el resultado a la salida al vídeo
Respecto al hardware utililizado :
- Nvidia Jetson TX2×1
- Raspberry Pi 3 Model B×1
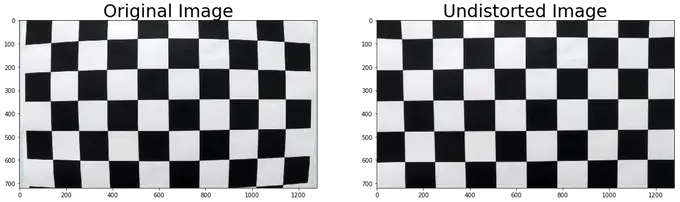
Corrección de distorsión
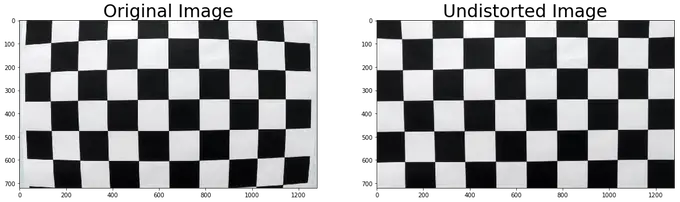
Las lentes de las cámaras distorsionan la luz entrante al enfocarla en el sensor de la cámara o CCD . Aunque esto es muy útil porque nos permite capturar imágenes de nuestro entorno, a menudo terminan distorsionando la luz ligeramente de forma imprecisa lo cual puede ofrecernos medidas inexactas en aplicaciones de visión por ordenador . No obstante fácilmente podemos corregir esta distorsión calibrando la imagen de un objeto conocido ( por ejemplo tablero de ajedrez asimétrico,)y generando un modelo de distorsión que represente las distorsiones de la lente.
La cámara utilizada en la prueba video fue utilizada para tomar 20 imágenes de un tablero de ajedrez, que fueron utilizados para generar el modelo de distorsión.El autor comenzó por convertir la imagen a escala de grises y entonces aplico la función cv2.findChessboardCorners .Como sabemos que este tablero de ajedrez es un objeto tridimensional con líneas rectas exclusivamente podemos aplicar algunas transformaciones a las esquinas detectadas para alinearlos correctamente utilizando cv2.CalibrateCamera() obteniendo así los coeficientes de distorsión y la matriz de cámara de modo que así ya estaba calibrada la cámara
Realizado el proceso anterior se puede utilizar cv2.undistort() para corregir el resto de sus datos de entrada.
Como demostración en la imagen se puede ver la diferencia entre la imagen original del tablero de ajedrez y la imagen corregida a continuación:
Aquí está el código exacto que usó el autor para esto:
def undistort_img():
# Prepare object points 0,0,0 ... 8,5,0
obj_pts = np.zeros((6*9,3), np.float32)
obj_pts[:,:2] = np.mgrid[0:9, 0:6].T.reshape(-1,2)
# Stores all object points & img points from all images
objpoints = []
imgpoints = []
# Get directory for all calibration images
images = glob.glob('camera_cal/*.jpg')
for indx, fname in enumerate(images):
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, corners = cv2.findChessboardCorners(gray, (9,6), None)
if ret == True:
objpoints.append(obj_pts)
imgpoints.append(corners)
# Test undistortion on img
img_size = (img.shape[1], img.shape[0])
# Calibrate camera
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, img_size, None,None)
dst = cv2.undistort(img, mtx, dist, None, mtx)
# Save camera calibration for later use
dist_pickle = {}
dist_pickle['mtx'] = mtx
dist_pickle['dist'] = dist
pickle.dump( dist_pickle, open('camera_cal/cal_pickle.p', 'wb') )
def undistort(img, cal_dir='camera_cal/cal_pickle.p'):
#cv2.imwrite('camera_cal/test_cal.jpg', dst)
with open(cal_dir, mode='rb') as f:
file = pickle.load(f) mtx = file['mtx']
dist = file['dist']
dst = cv2.undistort(img, mtx, dist, None, mtx)
return dst
undistort_img()
img = cv2.imread('camera_cal/calibration1.jpg')
dst = undistort(img) # Undistorted image
Y ahora podemos ver la corrección de distorsión aplicada a una imagen de la carretera.

Solo se puede notar diferencias leves, pero esto como veremos puede tener un impacto enorme en el tratamiento de la imagen.
Deformación de la perspectiva
La detección de carriles con trazados curvas en espacios de la cámara espacio no es uan tarea fácil asi que la idea es conseguir una vista de pájaro de las pistas , lo cual se e puede hacer aplicando una transformación de perspectiva en la imagen. Aquí es lo que parece:
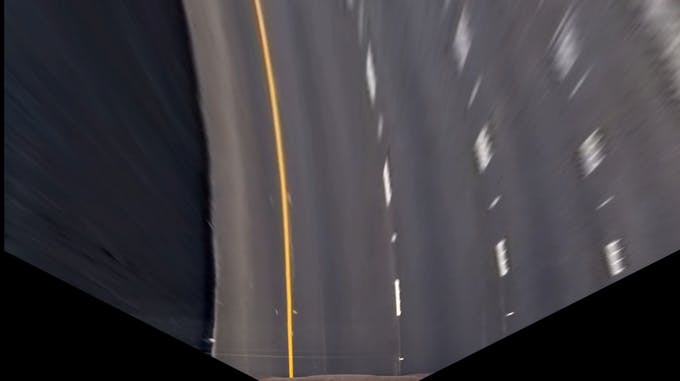
Como vemos nos es nada espectacular debido a que el carril esta sobre una superficie plana en 2D, asi que podemos encajar un polinomio que puede representar fielmente el carril en el espacio del carril
Puede aplicar estas transformaciones a cualquier imagen usando la función cv2.getPerspectiveTransform() para obtener la matriz de transformación, y aplicar la función cv2.warpPerspective() a una imagen.
Aquí está el código que uso el autor para ello:
def perspective_warp(img,
dst_size=(1280,720),
src=np.float32([(0.43,0.65),(0.58,0.65),(0.1,1),(1,1)]),
dst=np.float32([(0,0), (1, 0), (0,1), (1,1)])):
img_size = np.float32([(img.shape[1],img.shape[0])])
src = src* img_size
# For destination points, I'm arbitrarily choosing some points to be
# a nice fit for displaying our warped result
# again, not exact, but close enough for our purposes
dst = dst * np.float32(dst_size)
# Given src and dst points, calculate the perspective transform matrix
M = cv2.getPerspectiveTransform(src, dst)
# Warp the image using OpenCV warpPerspective()
warped = cv2.warpPerspective(img, M, dst_size)
return warped
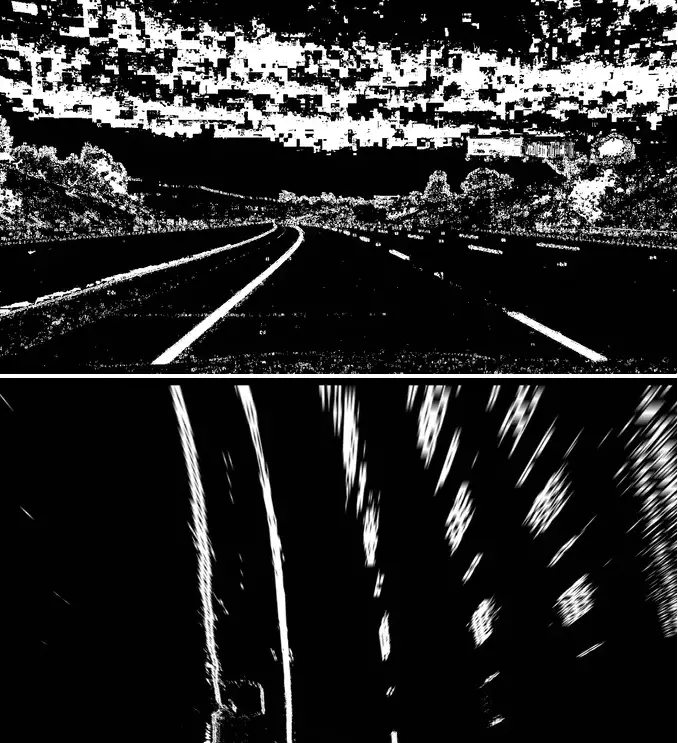
Filtro de Sobel
En otras versiones una opción era filtrar las líneas de carril con el color peor sin embargo, esto no siempre es la mejor opción. Si el camino utiliza luz de color concreta en lugar de asfalto, el camino pasa fácilmente a través del filtro de color, y esta la percibirá como una línea de carril blanco, pero eso no es correcto.
En su lugar, podemos utilizar un método similar al detector de borde, esta vez para filtrar hacia fuera de la carretera. Las líneas de carril suelen tienen un alto contraste en la carretera, por lo que podemos utilizar esta peculiaridad para nuestro beneficio. La funcion detector de borde Canny utilizado anteriormente hace uso de Operador de Sobel , para obtener el gradiente de una función de la imagen. La documentación de OpenCV tiene una fantástica explicación sobre cómo funciona asi que utilizaremos esto para detectar zonas de alto contraste para las marcas de carril filtro e ignorar el resto del camino .
Todavía utilizaremos el espacio de color HLS nuevamente, esta vez para detectar cambios en la saturación y la ligereza. Los operadores de sobel se aplican a estos dos canales, y extraemos el gradiente con respecto al eje x y añadiremos los píxeles que pasan nuestro umbral de degradado a una matriz binaria que representa a los píxeles de nuestra imagen. Aquí está como se ve en cámara espacio y lane
 :
:
Tenga en cuenta que las partes de la imagen que estaban más lejos de la cámara no conserven su calidad muy bien. Debido a las limitaciones de resolución de la cámara, datos de los objetos más lejos son muy borrosos y ruidosos pero no necesitamos concentrarnos en la imagen, para que podamos utilizar sólo una parte de esta.
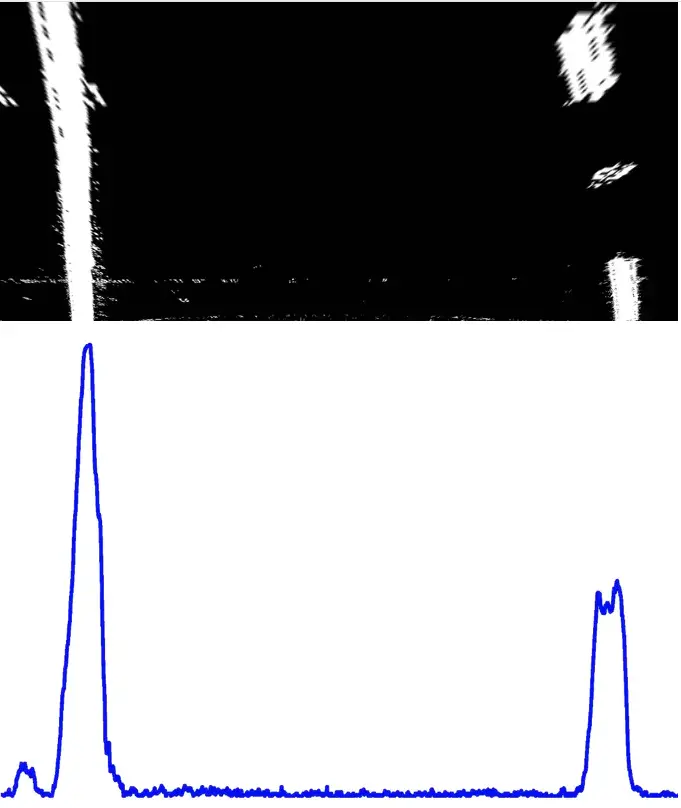
Detección de picos del histograma
Ahora aplicaremos un algoritmo especial llamado Sliding Window Algorithm ( algo asi como algoritmo Desplazamiento de Ventana )para detectar nuestras líneas de carril. Sin embargo, antes de que lo podemos aplicar, debemos determinar un buen punto de partida para el algoritmo pues este funciona bien si comienza en un lugar donde haya píxeles de lineas presentes, pero ¿cómo podemos detectar la ubicación de estos píxeles de carril en primer lugar?
Estará recibiendo un histograma de la imagen con respecto al eje X. Cada parte del histograma siguiente muestra píxeles blancos en cada columna de la imagen. Entonces tomamos los picos más altos de cada lado de la imagen, uno para cada línea de carril y tendríamos resulto esta parte
Aquí vemos como el histograma parece, al lado de la imagen binaria:
Búsqueda de ventana deslizante
Ahora necesitamos utilizar el algoritmo de ventana deslizante para distinguir entre los límites del carril de la izquierda y derecha para que podemos caber dos curvas diferentes que representan los límites del carril.
El algoritmo sí mismo es muy simple. A partir de la posición inicial, la primera ventana mide cuántos píxeles se encuentran dentro de la ventana. Si la cantidad de píxeles alcanza un cierto umbral, desplaza la siguiente ventana a la posición lateral media de los píxeles detectados. Si no se detectan los suficientes píxeles, comienza la siguiente ventana en la misma posición lateral.
Esto continúa hasta que las ventanas alcanzan el otro borde de la imagen .Asimismo los píxeles que corresponden a las ventanas reciben un marcador.
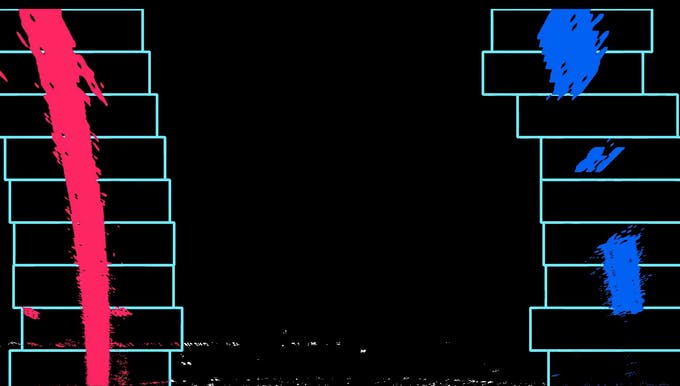
En las imágenes de abajo, los píxeles marcados azules representan el carril derecho, y los rojos representan la izquierda:
Ajuste de curvas
El resto del proyecto es ya mas fácil. Aplicamos la regresión polinomial para los pixeles rojos y azules individualmente usando np.polyfit() , y entonces el detector se hace sobre todo
Esto es lo que parecen las curvas:

Superposición de carril detectado
Ya estamos en la parte final del sistema de detección: la interfaz de usuario. Simplemente creamos una superposición que llena en la parte detectada del carril, y luego finalmente lo aplicamos al vídeo.
Este es el resultado final
!Sin duda un resultado realmente espectacular que puede servir de partida para proyectos mas ambiciosos!
Mas información en www.hackster.io