Tarde o temprano todos ( o casi todos) hemos pasado por esa angustiosa y horrible experiencia de intentar encender nuestro querido ordenador, quizás en el momento mas inoportuno , y en efecto de repente nuestro ordenador no funciona y la paciencia se nos agota y no sabemos que hacer
En realidad no es demasiado difícil al menos hacer un primer análisis y tal vez con un poco de suerte y por supuesto la gran ayuda de Internet podamos salir airosos de semejante trance
A continuación vamos a clasificar las casticistas que pueden ocurrir de mayor a menor gravedad para poder nosotros evaluar que le esta pasando a nuestro equipo y poder pensar en una vía de solucionar el problema.
El ordenador no enciende
Es el problema mas grave y sin embargo , quizás según la circunstancia , es el que mas fácil pueda resultar solucionarlo .
Lo mas obvio es primer asegurarse frecuentemente de que el equipo esté conectado a la red eléctrica y con ambos extremos del cable firmemente sujetos ( y por supuesto el cable no tiene ninguna deficiencia) . Si la fuente de alimentación lleva interruptor, es posible que esté en posición de apagado ‘O’ en lugar de encendida ‘I’ ( o incluso se haya podido romper ese interruptor).
Si el ordenador está correctamente conectado y recibe alimentación por el cable:
- Pondremos especial interés a los leds que tenga el equipo de modo que miraremos si el Luz LED indicador de estado de Suspensión y de Hibernación o Apagado:cuando el estado es Sleep (S1) el LED parpadea, cuando el estado es Sleep (S3) o Hibernación (S4) o Apagado/Powered Off (S5) la LED se apaga (Off) y cuando el estado es Encendido o Wake Up (S0) el LED se mantiene On (encendido). Si no enciende nada en ningún caso continué leyendo….
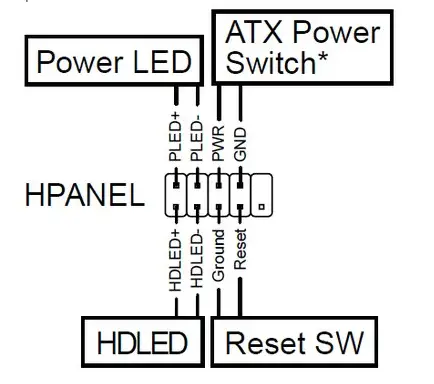
- Podría ocurrir que se haya soltado el cable del pulsador de encendido del PC a la placa base y haya que ajustarlo un poco . El pulsador en realidad cumple una triple función ;encendido, apagado o suspensión. Al presionar una vez, el equipo inicia el Apagado completo sino se configura para Suspensión o Hibernación en Opciones de energía del Panel de control en Windows, 3 a 5 segundos Apagado. Si se configura la opción Suspender o Hibernar para el menú Apagar del menú INICIO o para el Botón de encendido/apagado el equipo se apagará solo se mantiene presionado el botón de 3 a 5 segundos. Este cable suele ir marcado con las siglas Cables Power SW, o PW Switch, o M/B SW de modo que solo deberemos comprobar que estos están conectado a las clavijas PW o PWRSW o Power o lo que indica en el cable.
.
- Si el pulsador esta bien ,hay alimentación y que el interruptor está en posición de encendido y no pasa absolutamente nada , podría existir un fallo en la fuente de alimentación o en la placa base pero ….También podría existir una carga estática residual que impide a la placa ejecutar el arranque. No pierde nada por desconectar el cable de alimentación del ordenador y después presionar repetidas veces pulsar el botón POWER del equipo para eliminar esa carga y por supuesto volver a probar.
- Si ha llegado hasta aquí y no se enciende absolutamente nada podría existir un cortocircuito en el cableado modular que sale de la fuente de alimentación y llega a los periféricos, a los discos o a la gráfica mediante los conectores Molex, SATA o PCI-E.
- La fuente de alimentación suele ser en la mayoría de los casos una de las principales fuente de problemas , pues subidas de tensión, funcionamiento incesante y con frecuencia mala ventilación hacen que esta caiga . Los síntomas son claros: pulsa el botón de encendido y lo único a lo sumo se oye el ruido del ventilador de la fuente a lo sumo , pero no que oye el ruido de los discos o el ventilador de la CPU . Por supuesto si huele a quemado o ve humo lo mejor es desconectar lo antes posible, procediendo más tarde a cambiar la fuente por otra cuyo precio no es muy elevado (unos 15€ una fuente ATX de 500W de buena calidad).

- Posibilidad de falta de energía :Si el equipo se reinicia especialmente cuando ejecuta aplicaciones de alto rendimiento o con juegos, quede que tengas una fuente de alimentación con insuficiente potencia para los componentes que más demandan en estas situaciones.No es sólo una cuestión de la cifra de vatios totales que declara el fabricante, tiene mucha más importancia la descripción técnica de la ficha del producto, en la que se indican los valores de potencia e intensidad para cada línea de suministro (distintos componentes requieren líneas de diferente tensión e intensidad). Si existe un componente que demanda una intensidad muy elevada cuando trabaja a pleno rendimiento y la línea que debe suministrarlo no alcanza a atender esa demanda, por lo general el componente empezará a funcionar inestable y acabará enviando datos corruptos a la memoria del sistema, que finalmente se bloqueará.
- Aunque la fuente de alimentación suele ser la primera en averiarse hay otros componentes que también pueden hacerlo ( o incluso la misma fuente de alimentación puede romperlos por sí misma tras fallar, por sobre tensiones). En este caso,deberá iniciar una comprobación de ensayo y error, reemplazando y desenchufando componentes hasta dar con el defectuoso ( si no esta seguro simplemente haga una foto de cable para luego volverlo a colocar en su lugar ). Los principales sospechosos son placa base, memoria y procesador, en ese orden. El resto de componentes pueden fallar también, pero el sistema se iniciaría mostrando algún error o pitando (a no ser que esté provocando algún cortocircuito que impida a la placa base funcionar correctamente).


El ordenador enciende, pero emite pitidos
Los pitidos indican posibles averías o que impiden que se inicie correctamente dado que normalmente no hay video y el sistema no puede presentar los errores por pantalla. Dependiendo de la cantidad y duración de los pitidos, podemos identificar el error que varían en función de la marca y modelo de la placa madre.
Esta admitido desde los primeros ordenadores compatibles pc el siguiente código de pitidos:
- Un pitido corto indica que el equipo se ha iniciado correctamente. Si el equipo no muestra señal, hay otras comprobaciones que hacer.
- Un pitido continuo suele indicar un fallo eléctrico en el equipo provocado por una fuente de alimentación defectuosa o una placa base defectuosa.
- Varios pitidos cortos constantes indican que la placa base está defectuosa o que tenemos algunos pines del socket o del procesador doblados o rotos. También podemos estar ante un caso de memoria RAM defectuosa.
- Un pitido largo indica que algún modulo de memoria RAM está defectuoso, o que varios lo están.
- Un pitido largo y dos o tres cortos están relacionados con un mal contacto de la tarjeta gráfica o con una unidad que esté defectuosa.
El ordenador enciende pero no hay vídeo
Afortunadamente el motivo de no tener vídeo si hemos oido el pitido inicial , normalmente de puede deber a algo tan obvio de que no se ha conectado correctamente el monitor en la toma de vídeo adecuada. Por ejemplo si su ordenador lleva una tarjeta gráfica instalada aparte de la placa madre , debe siempre conectar el monitor a una toma de vídeo de la propia tarjeta y no a una toma que pueda llevar la placa base.Ademas si la gráfica no lleva una toma adecuada para el cable que está usando,no servirá que conecte el monitor a una toma de la placa base porque estas quedan desactivadas cuando se instala una tarjeta gráfica.
Hablando de estándares , las tarjetas gráficas modernas ya no llevan el veterano conector VGA de 15 pines (aunque todavía es posible encontrar monitores con ese conector junto al DVI) por ro lo normal es que los modernos monitores solo tengan una conexión HDMI, un DVI o un DisplayPort asi que asegúrese que cuenta con el cable adecuado para conectar su monitor con su tarjeta gráfica ( recuerde : en informática los conectores están hechos para que no haya confusión posible en el uso de los mismos).
Mensajes de error
Un ordenador nuevo puede arrancar perfectamente pero puede quedarse parado con un frío mensaje de texto sobre una pantalla en negro como alguno de estos:
- Reboot and select proper boot device : no esta configurado correctamente la unidad de arranque
- Missing operating system :Este error indica que el equipo no tiene sistema operativo instalado
Si está seguro de que su ordenador tiene un sistema operativo instalado, lo que este error indica es que el equipo intenta arrancar ( por ejemplo disco, CD, DVD o usb) no tiene sistema operativo de modo que probablemente haya configurado la lista de dispositivos de arranque y no haya puesto en ella el disco correcto desde el que sí hay que hacerlo ( esto se configura en el programa de la BIOS de la placa base).
En determinadas situaciones, este error también puede indicar que el sistema operativo instalado está dañado. Puede ser así porque el ordenador se haya apagado bruscamente cortando el suministro eléctrico o por un apagón justo cuando el disco estaba realizando una operación de lectura o de escritura. Una solución para esto es ejecutar la instalación de Windows con el disco original y seleccionar las opciones de reparación de arranque, o bien reinstalar el sistema por completo
El ordenador se reinicia o a veces da pantallazos azules BSOD
Cuando el funcionamiento de un ordenador es inestable, a veces se bloquea repentinamente dejando a la vista una característica pantalla con fondo azul y texto en blanco que muestra un detalle técnico del estado del sistema en el momento del fallo, la cual se conoce coloquialmente como Pantalla Azul De la Muerte, BSOD por las siglas de Blue Screen Of Death en inglés.
Normalmente esta pantalla se debe a :
- Lo más común es que se deba a uno o varios módulos de memoria RAM con defecto. Para identificar si algún módulo tiene defecto, puedes usar MemTest86. Si tiene varios módulos se , recomienda que los pruebe de uno en uno, es decir, dejando uno puesto en la placa base y retirando los demás, sucesivamente hasta haber repetido el proceso con cada módulo que tenga.
- La segunda sospechosa habitual es la tarjeta gráfica, cuando hay una instalada. Se trata de un componente electrónico muy delicado y sensible a la temperatura, a las fluctuaciones de corriente y las cargas estáticas.


Debe estar conectado para enviar un comentario.