Hace ya algun tiempo desde que el famoso fabricante japones de automóviles Toyota sacara al mercado su exitoso modelo Prius en el que por primera vez veíamos un coche convencional de gran consumo que no solo podia circular con su motor de combustión , sino que también podia circular con su motor eléctrico alimentado por unas baterías que se recargaban no solo con el motor de explosión sino también en las deceleraciones, en la frenada y en los descensos recuperando así de este modo una energia que de otro modo no se utilizaría, ayudando por tanto a colaborar con la reducción de gases contaminantes a la atmosfera y por tanto a minimizar nuestra actividad con el medio ambiente.
El Prius fue lanzado en el mercado japonés en 1997 y fue el primer vehículo híbrido producido en serie siendo lanzado en 2000 lanzado en otros mercados a nivel mundial de modo que desde su lanzamiento en 2009, el Prius de tercera generación ha vendido más de 1 millón de automóviles en el mundo entero hasta septiembre de 2011.
Es importante destacar que el Prius no es un automóvil eléctrico, tanto es así que la tercera versión de este modelo cuenta con un motor de gasolina de 1.8 litros de cilindrada (en las anteriores era de 1.5 litros) que trabaja coordinadamente con un motor eléctrico en una configuración denominada híbrida .
El motor eléctrico que se alimenta de una serie de baterías se recargan mientras el automóvil está en movimiento no requiriendo una fuente externa (problema en el que se enfrentan los vehículos eléctricos que tienen que ser «enchufados» periódicamente para recargarse, aunque al ser uno de los primeros modelos híbridos, hubo talleres en EEUU que lo modificaron para hacerlo enchufable también), ayudando así al motor de gasolina a encontrar condiciones ideales de funcionamiento y, bajo ciertas circunstancias y por determinados lapsos, puede mover independientemente al automóvil, el cual entonces se desplaza sin consumir combustible y reduciendo significativamente el ruido y contaminación producidos.

Además del bajísimo coeficiente de penetración de la carrocería (0,25), otra estrategia de ahorro de combustible es que el motor de gasolina se apaga en las constantes detenciones que se sufren en el tránsito urbano usando el clásico sistema start-stop que muchos otros fabricante también han implementado en sus vehículos .

Tal fue la aceptación del público del Prius, en general motivado por su bajo consumo y bajas emisiones, que muchos otros fabricantes también sacaron sus versiones hibridas al mercado (destacando Nissan), pero desde entonces, han surgido tres variantes : el hibrido clásico usado en el Toyota Prius ( ahora llamado hibrido eléctrico) , el hibrido enchufable ( con mayor bateria que se puede recargar desde una toma standard de ca) y el nuevo microhíbrido o hibrido ligero, el cual busca protagonismo democratizando la tecnologia hibrida al resto de vehículos.
Estas tres tecnologías similares las pasamos a describir en el siguiente resumen:
| Motor híbrido enchufable (eHybrid y GTE) | Motor eléctrico para trayectos diarios, motor de combustión para distancias más largas Potencia de serie: eHybrid Potencia deportiva: GTE | Mayor potencia al combinar ambos motores Autonomía eléctrica con el motor eléctrico Conducción sin emisiones con el motor eléctrico | Carga en casa Carga en estaciones públicas |  | |
|---|---|---|---|---|---|
| Híbrido ligero (eTSI) | Motor principal de combustión con un aporte extra de energía eléctrica | Menor consumo Rendimiento optimizado | Energía regenerativa con el frenado |  | |
| HIbrido no enchufable | Motor eléctrico para trayectos diarios( hasta unos 50km), motor de combustión para distancias mucho más largas | Gran autonomía. Se considera un paso intermedio hacia el hibrido enchufable | Energía regenerativa con el frenado | |
Por su bajo coste de integración, esta tecnología se utilizará de forma masiva en los próximos años, especialmente en Europa, y contribuirá de manera decisiva al cumplimiento de los objetivos de emisiones medias de CO2 en las marcas, por eso es muy probable que su nuevo coche sea un microhíbrido ya que se estima que, en 2030, se producirán 20 millones de unidades con nivel 0.
La compañía Schaeffler trabaja desde hace tiempo en la implantación de esta tecnología 48V clave en las nuevas funcionalidades a los automóviles y en la conducción autónoma, y establece seis niveles de hibridación:
- Nivel 0. El motor eléctrico va unido al cigüeñal del motor de combustión y aprovecha la energía cinética de las frenadas. Una pequeña batería de iones de litio almacena la electricidad que sirve para apoyar al Start-Stop, mantener la velocidad de crucero o ganar potencia adicional. El aire acondicionado funciona un tiempo incluso con el motor apagado. Frente a un microhíbrido de 12 voltios el ahorro oscila entre un 3,8 y un 6,6% en consumos y emisiones según el tipo de motor eléctrico utilizado.
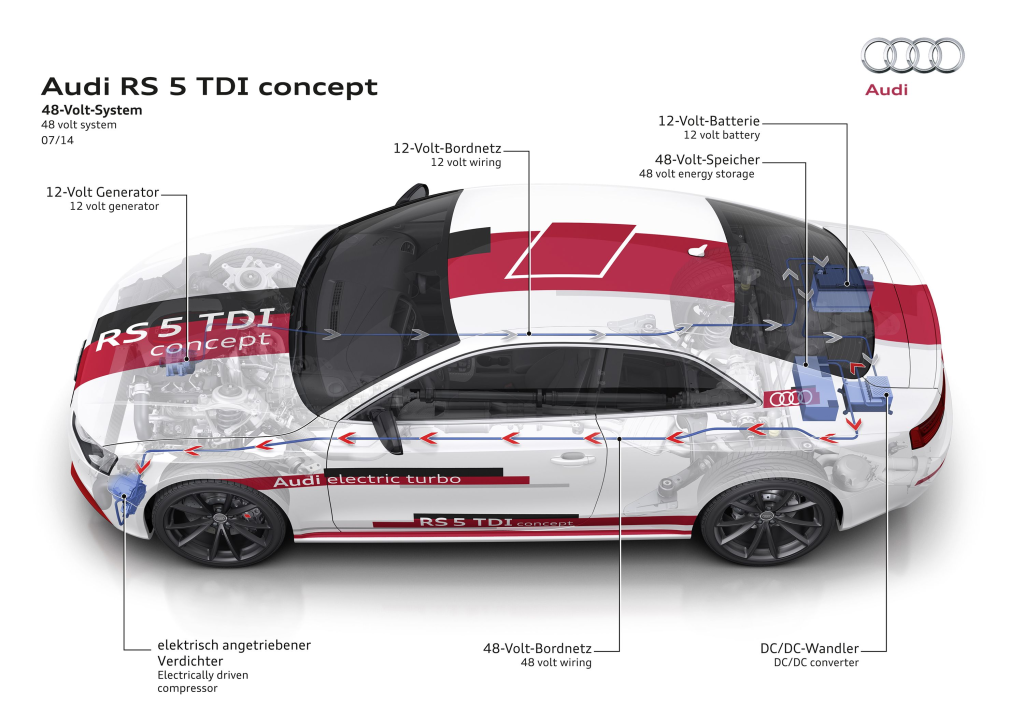
- Nivel 1. Se emplea un motor síncrono de imanes permanentes (PSM). La reducción de consumos y emisiones de CO2 es del 8,5% bajo ciclo WLTP, y puede ser mejor si el motor de combustión emplea una avanzada distribución variable, alta relación de compresión
- Nivel 2. El motor eléctrico va entre el térmico y la caja de cambios. Permite conducir de forma eléctrica a velocidades bajas, como en un atasco, o al aparcar y maniobrar. El módulo híbrido pesa unos 30 kg y rinde 10 kW, con picos máximos de 15 kW durante 20 segundos. Se adapta fácilmente a una disposición de motor transversal de tres cilindros con tracción delantera.
- Nivel 3. El motor eléctrico se ubica en la salida de la transmisión. El rendimiento llega a 20 kW en modo de generador, y entrega hasta 234 Nm de par máximo en modo motor. Las emisiones de CO2 caen un 15,3%. El módulo híbrido pesa 22 kg y también se puede usar en un vehículo de tracción total con la adición de un embrague multidisco, que transmite hasta 800 Nm.
- Nivel 4. El motor de combustión mueve el eje delantero y un sistema de transmisión eléctrica mueve el eje trasero. El tren posterior está diseñado de tal manera que hace posible la conducción puramente eléctrica en entorno urbano. Su sistema de tracción total llega a reducir el consumo y las emisiones en un 15,5% respecto a un tracción delantera; y en un 24% respecto a ese mismo modelo con tracción total convencional.
- Nivel 5. Este nivel también ofrece tracción total, pero de un modo diferente: el propulsor y la transmisión están alojados en el cubo de cada rueda de un eje. En la tecnología de 48 voltios, este nivel sólo es válido para vehículos ligeros de un solo pasajero que deberían llegar en un futuro no muy lejano. Este sistema se considera un microhíbrido, y busca obtener un mejor rendimiento del motor de combustión, prescindiendo de uno o varios motores eléctricos que muevan las ruedas. Es decir, con este sistema no se crea un coche híbrido realmente, ya que no se consigue fuerza motriz con la electricidad generada por el motor ni en la almacenada en la batería.
Los vehiculos Hibridos no enchufables
La principal diferencia entre un, HEV o coche híbrido convencional y un híbrido 48V, es que el primero es capaz de arrancar y moverse empleando exclusivamente energía eléctrica. Un Mild Hybrid, es aquel coche en el que el sistema eléctrico asiste al motor térmico, pero no tiene tanta potencia como para impulsar en solitario al vehículo, aunque a cambio los microhíbridos también tiene menor peso al llevar menos bateria, son más seguros ( la bateria es de menor voltaje), son más económicos y tienen las misma etiqueta ECO.
A los mandos de un híbrido de 48V, el arranque es más suave y rápido. Cuando entra en funcionamiento el motor eléctrico, es imperceptible para el conductor, aunque este si podrá apreciar el extra de agilidad del coche. Es decir, no se producen “tirones”, vibraciones o ruidos incómodos, pero un microhíbrido, gracias a su tecnología, es un coche dinámico y divertido de conducir.
En ninguno de los casos es necesario enchufar el coche para recargar sus baterías (que no tienen un tamaño excesivo), sino que estas se recargan a través de la frenada regenerativa.
En resumen un sistema Mild Hybrid es más sencillo, ligero y asequible que un híbrido convencional.
Los vehiculos microhibridos
Cuando nos hablan de microhíbridos, coches “mild hybrid”, hibridación “suave” ,coches híbridos de 48 Voltios (aunque también existen versiones más antiguas de 12V), se estarán refiriendo a lo mismo, es decir vehículos que llevando un motor de combustión este es apoyado por un sistema eléctrico de 48 Voltios que asiste a la aceleración, entregando unos 12kW típicos de potencia adicional (los hay de hasta 20kw) , reduciendo el consumo de combustible y las emisiones de CO2 en hasta un mínimo 7% (o incluso hasta un 15% en versiones de 20kw según el fabricante).
Además por su eficiencia, la gama 48V cuentan con la etiqueta ECO de la DGT en Europa por lo que se puede acceder con estos al centro de las ciudades cuando estén activados los protocolos por altos niveles de contaminación y a las zonas de prioridad residencial, contando con ventajas a la hora de aparcar, y descuentos en peajes.
Gracias a la tecnología Mild Hybrid es posible por tanto reducir drásticamente el consumo de combustible y las emisiones. Se trata de un sistema que combina un motor de combustión con uno eléctrico de 48V. El sistema eléctrico, asiste al de combustión, entregando potencia adicional durante las diferentes etapas de la conducción. Además, ayuda a que el motor arranque de manera más rápida y suave. Gracias a ello, se reduce la dependencia del motor de combustión interna, se limita el esfuerzo de los componentes y, por tanto, su desgaste.
En resumen el sistema microhíbrido ofrece las siguientes ventajas:
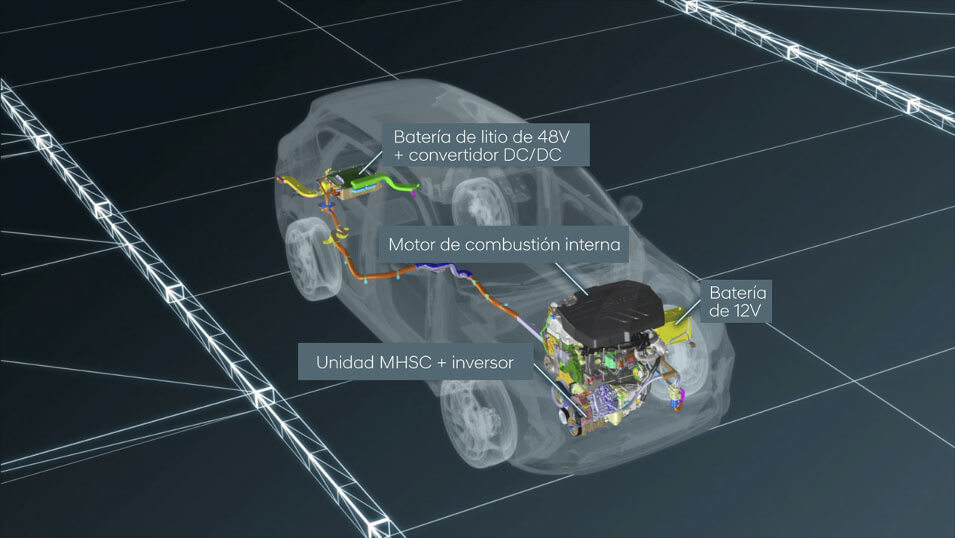
- Arranque cómodo. El sistema híbrido suave es particularmente útil para el tráfico urbano. El generador de arranque híbrido suave (MHSG) da apoyo al motor de combustión cuando se reinicia después de que el tráfico se detenga. Después admite un arranque del motor más rápido y suave con un par adicional, aprovechando la energía de la batería de 48V.
- Aceleración. En aceleración, el generador de arranque da apoyo al motor según la carga del sistema de batería y la entrada del acelerador del conductor. Una vez que se alcanza la velocidad requerida, el sistema cambia al modo neutro y deja de suministrar energía. Como resultado, se reducen las emisiones de CO2 y el consumo de combustible.
- Carga durante la conducción.A velocidad constante, el sistema está inactivo o actúa como un generador que carga la batería de 48V, según el estado de carga de la batería.
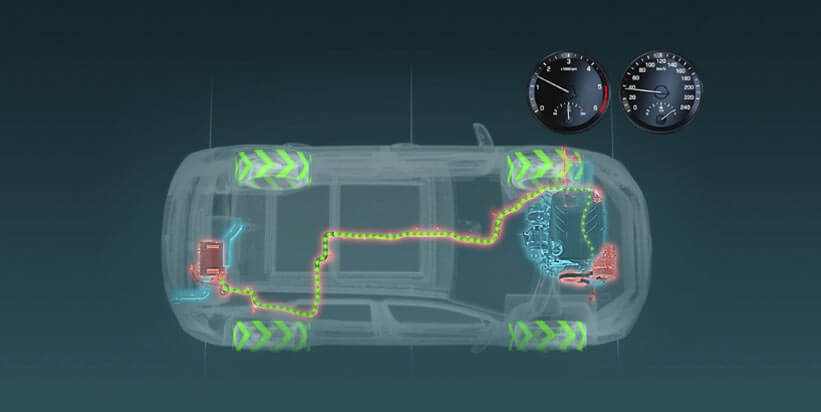
- Recuperación.En las fases de frenado activo o de marcha libre, el cigüeñal giratorio alimenta el generador de arranque, que luego recupera una potencia máxima de 10 a 12kW. El generador convierte la energía cinética de frenado en electricidad y la devuelve a la batería de 48V.
- Modo Start-Stop.La función Start-Stop se activa en velocidades inferiores a 30km/h. Con una desaceleración de entre 30 y 0km/h, y con el embrague desacoplado, el motor se apaga por completo.
- Mas economico,ligero y seguro: Las pequeñas baterías de 48V de iones de litio son de bajo voltaje pero potentes aliviando el peso del vehiculo y reduciendo el peligro de la BT.
En resumen pues se trata de una tecnología que ha venido para quedarse, permitiendo una significativa reducción de los consumos y emisiones de la mayoría de los automóviles, de un modo sencillo y a bajo coste.
Funcionamiento
En general es una tecnología de fácil implantación ( incluso adaptable a un los modelos convencionales de motor de explosión). En comparación con los sistemas híbridos de alto voltaje, el de 48 voltios tiene una destacada relación coste-beneficio, ya que su implementación técnica es sencilla gracias a una concepción modular que facilita su inserción. No requiere los elementos de aislamiento eléctrico necesarios en los híbridos de alta tensión y se puede instalar en automóviles, estructuras de producción y de ensamblaje ya existentes, un aspecto clave para comercializar híbridos a precios muy competitivos.
A la hora de implantar esta tecnologia según el fabricante surgen diferentes modos de llevarla a cabo ( incluso de nombrarla) ,por ejemplo, los Suzuki con denominación SHVS llevan un alternador inteligente que permite generar pequeñas cantidades de energía eléctrica, almacenarlas en una batería y usarlas en momentos puntuales para ganar en eficiencia, pero con un sistema eléctrico de 12 voltios.
En el caso de los microhíbridos, se da mucho valor a la energía cinética obtenida desde la frenada y en otros momentos de la circulación. Esa energía se capta y se almacena en unas baterías de iones de litio. Esta electricidad se convierte a un voltaje de 48 voltios ( bastante superior a los 12 voltios que suele tener el sistema eléctrico de los coches).
Los microhíbridos permiten ofrecer electricidad desde una fuente distinta del motor, reduciendo el consumo lo cual permite que el coche no tenga que conseguir energía eléctrica para elementos que suelen utilizar la electricidad generada por el alternador del coche, así que este tiene que trabajar menos y en consecuencia, el consumo puede reducirse. No demasiado, esto es cierto, pero sí que permitirá que se pueda alimentar elementos como los compresores eléctricos de la climatización y otros que están presentes en los coches actuales.
Esta energía eléctrica proviene de este generador de 48 voltios, que evita el consumo de electricidad desde el motor y mejora el rendimiento de esos elementos alimentados a través de este nuevo sistemas. ¿Qué se conseguirá con estos microhíbridos? Pues que modelos que por tamaño y prestaciones no pueden pasar a ser híbridos de pleno derecho puedan beneficiarse de la electrificación que está imponiéndose en el mercado y ofrecer a sus usuarios una ligera disminución en el consumo y en las emisiones.
La nueva hibridación “suave” que se está introduciendo poco a poco va más allá, electrificando la plataforma de los coches convencionales con un sistema de 48 voltios capaz de aportar una potencia suplementaria de hasta 20 kW sin realizar grandes cambios. Además, va a permitir una reducción media de consumos y emisiones de CO2 de un 15%, según el nuevo ciclo WLTP. Esta normativa va a hacer que los fabricantes ofrezcan cifras de homologación más próximas a la realidad y se aplicará a todos los coches matriculados a partir de septiembre de 2018.
Con el motor híbrido ligero (eTSI), tendremos toda la autonomía y adrenalina de la combustión con un extra de potencia eléctrica en momentos específicos. ¿Cómo? el motor de combustión estará siempre en funcionamiento y una batería eléctrica ayudará a la hora de arrancar, encender el climatizador o poner en marcha la radio ganando así en eficiencia.
Por ejemplo, a la hora de emprender la marcha, el motor de arranque de 12kW entra en funcionamiento para ayudar al motor de combustión aún está frío. En el momento que se calienta, aporta un pequeño empuje eléctrico para que la salida sea más suave y menos exigente para la mecánica del coche.
En las aceleraciones, el sistema de 48V también se conecta para ayudar al motor de combustión con un extra de potencia. Así, se aumenta la velocidad de respuesta y el dinamismo, al mismo tiempo que reducimos el consumo y las emisiones hasta en un 7%, según ciclo WLTP.
Durante las frenadas, la unidad MHSG que equipa el sistema, recupera parte de la energía, transformándola en eléctrica y almacenándola en las baterías de 48 voltios para un eficiente aprovechamiento posterior.
En la fase de recuperación de energía, a velocidad inferior a 30 km/h, el embrague se mantiene acoplado para transformar la energía en electricidad y una vez recuperada la energía y con la batería llena, el embrague se desacopla y el motor de combustión deja funcionar al eléctrico evitando el gasto de combustible.
A demanda del conductor y cuando las circunstancias lo requieran, el sistema de 48V volverá a aprovechar toda su potencia inmediatamente, de forma imperceptible para el conductor. Así, por ejemplo, en los atascos -cuando los arranques y las paradas son más frecuentes-, estaremos circulando sin consumir prácticamente combustible ni emitir gases contaminantes.
Vemos por tanto una cierta simplicidad de funcionamiento, que básicamente se traduce en la recuperación de energía en las fases de deceleración y frenado. Luego, esa energía se utiliza en tantas situaciones de conducción como sea posible: aumento de potencia, uso puramente eléctrico, para mantener la velocidad de crucero… De esta forma, el motor de combustión interna se desconectará y conectará entre 600.000 y 900.000 veces durante su vida útil, dependiendo de la estrategia de conducción adoptada.
Futuro
Cuidar el medio ambiente debería ser una prioridad, y por ello, los fabricantes de coches a nivel mundial han de cumplir protocolos de control de emisiones cada vez más exigentes .Se ha hablado que la tecnología microhíbrida que no solo se integrará este sistema en coches de gama media y alta, sino que hay pequeños urbanos que podrían contar con él. Vemos que ya no serán híbridos, pero la electricidad tendrá una presencia importante a lo largo de los próximos años (y de ahí a la completa electrificación… un par de pasos más). De hecho ya en la actualidad cada vez encontramos más alternativas a la movilidad tradicional, como demuestran la gama ECO de muchos fabricantes, con opciones para todos los gustos. En un futuro cercano, los coches ecológicos (eléctricos, híbridos, híbridos enchufables y de pila de combustible) serán los grandes protagonistas de una movilidad sostenible y más respetuosa con el medio ambiente. Los microhíbridos, tendrán un papel clave por sus características.
El sistema de 48V reduce de forma drástica las emisiones de CO2, por lo que estas versiones cuentan con una etiqueta medioambiental ECO. Esto supone que con estos se pueden acceder al centro de las ciudades durante los episodios de contaminación y a las zonas de prioridad residencial, tiene reducciones o exenciones en el pago de parquímetros y en el impuesto de tracción de mecánica (IVTM), y descuentos en peajes. La tecnología Híbrida 48V es mucho más accesible, ya que tiene un coste más contenido que los híbridos o híbridos enchufables convencionales. Además, el sistema de 48V es una alternativa eficiente para reducir de forma decisiva las emisiones de CO2 de un modo sencillo y a bajo coste.
En comparación con los sistemas híbridos de alto voltaje, el microhíbrido de 48 voltios resulta más sencillo a nivel técnico y de funcionamiento, por lo que resulta más asequible. Además, este sistema no requiere los elementos de aislamiento eléctrico necesarios en los híbridos de alta tensión, por lo que estrictamente deberían ser más seguros que incluso los eléctricos puros al estar alimentados por una tensión en CC usada desde hace décadas en equipos de telecomunicaciones por su bajo riesgo.
Por todas sus ventajas, esta tecnología se utilizará de forma masiva en los próximos años como lo demuestran las versiones modernas de muchos vehículos especialmente en Europa, y contribuirá de manera decisiva al cumplimiento de los objetivos de emisiones medias de CO2 y a que los propietarios de este tipo de coches, reduzcan de manera significativa su consumo.

Debe estar conectado para enviar un comentario.