Los Fire TV Stick son de las pocas alternativas que tenemos de disfrutar del ecosistema que Amazon pone en nuestra mano para convertir en inteligente un viejo TV ( o no tanto) . Como puede deducirse, el Fire Stick TV es uno de los productos más vendidos en Amazon ,ya que por sus prestaciones y precio ( entre 30€ en la versión lite, 40€ la versión standard y hasta llegar a los 60€ en su versión 4k) puede ser de gran utilidad en casa.

En efecto, como sabemos, el Fire TV Stick convierte su televisor en una Smart TV, por lo que básicamente es un reproductor de contenido multimedia en streaming con capacidad de resolución 4K (según versión), el cual además sólo se puede conectar mediante HDMI a su TV. Para ello debemos conectar el Amazon Fire TV Stick a su televisor HD por algun puerto hdmi libre sin olvidar de alimentarlo con 5v DC con el cargador incorporado (aunque podemos usar también un puerto USB del TV si este permite también un consumo de unos 100mA) y empiece a ver contenido en streaming en cuestión de minutos ( tras la configuración inicial donde básicamente ajustamos el idioma, la wifi a la que nos conectaremos, las credenciales de Amazon y se actualizará el firmware).

Este dispositivo es muy interesante poque con el asistente por voz Alexa solo tenemos que pulsar un botón y pedirle que busque películas y episodios de series favoritas, así como deportes y noticias en directo usando las principales plataformas del mercado, como Netflix, DAZN, Movistar+, Disney+, Apple TV y Amazon Prime Video, todo en un solo dispositivo. Asimismo podemos reproducir en streaming millones de canciones y usar el nuevo mando por voz Alexa para pedir una canción, artista o lista de reproducción, o para controlar la reproducción en servicios como Amazon Music, Spotify o TuneIn.
Amazon Fire TV Stick funciona con cualquier televisor HD, así que puede usarlo en casa de sus amigos o llevarlo de viaje pero para conectarlo y usarlo en cualquier lugar, necesitaremos una conexión Wi-Fi ( puede ser suficiente la zona wifi que activemos en nuestro dispositivo móvil).
Aunque no es un aparato que falle demasiado, de vez en cuando se pueden producir errores graves mientras usamos el Fire TV Stick. Por ejemplo, que el mando no nos responda y que sea imposible revivirlo. Una primera medida que podemos hacer es la de apagar la llave HDMI a ver si vuelve en sí, pero si persiste, entonces tenemos que hacer algo mucho más agresivo. Esos dos grandes incidentes pueden ser, o bien que el mando a distancia se ha desemparejado, es decir, ha perdido su vínculo con el Fire TV Stick que compramos, o bien el cuelgue solo afecta al mando, de tal forma que sea necesario reiniciarlo para devolverlo a un estado de completa actividad.
Los botones del mando
De todos los botones que podemos ver en el mando de control remoto de vuestro Fire TV Stick, vamos a quedarnos con solo cuatro, que son los que tenemos señalados justo aquí debajo con números que van del 1 al 4:
- Home (o Inicio): es el que podéis ver en la parte central y que tiene un iconito de una casa.
- Cursor izquierdo: de la rueda que contiene los botones de las cuatro direcciones posibles, solo nos interesa la que apunta a la izquierda.
- Volver: a los que tenéis un móvil con Android os sonará, porque es la flechita que parece volver por dónde venía. Atentos a ella.
- Opciones: con varias líneas blancas horizontales, ese botón será esencial para realizar cieras acciones.
Cómo resetear el mando del Fire TV Stick
Antes de que nos decidamos por tomar medidas especiales más expeditivas como es el realizar un nuevo emparejamiento del mando a distancia con el Fire TV Stick, lo mejor es intentar antes algo más rápido y que afecta solo al propio mando así que lo interesante es empezar con un reset para intentar arreglar ese cuelgue transitorio en el que está sumido. Para llevarlo a cabo, solo tenéis que hacer lo siguiente en el mando del Fire TV Stick con Alexa integrado:
- Desconecte el Fire TV Stick de tu televisor y espere un minuto. Esto lo haremos para no encenderlo al tocar el mando.
- A continuación, mantenga pulsado el cursor izquierdo, el de Menú y Atrás todos a la vez. Es importante que no los pulsé escalonadamente, o que alguno se suelte durante el proceso de reset. Así que antes de hacerlo, pruebe a ver de qué forma segura puede colocar los dedos para que no haya errores.
En el caso del modelo 4K de ese mismo Fire TV Stick, el procedimiento es sensiblemente distinto:
- Repetimos el mismo proceso que antes solo que los tres botones los mantenemos pulsados a la vez durante 12 segundos.
- Los soltamos y esperamos otros cinco segundos.
- Ahora quitamos las pilas del mando a distancia.
- Encendemos el Fire TV Stick 4K y esperamos un minuto más.
- Colocamos de nuevo las pilas al mando y pulsamos sobre el botón Home. El indicador LED que trae debería parpadear en color azul para confirmarnos que todo el proceso ha funcionado y el control se está comunicando con la llave HDMI.
Es importante decir que el modelo con Alexa Voice Remote Lite no tiene esa luz LED, por lo que identificar que todo funciona será cuestión de ver que ya podemos navegar correctamente por los menús.
Vuelva a emparejar el mando con su Fire TV Stick
Ahora bien, el otro problema que puede asaltarnos es que, por razones desconocidas, el mando parece funcionar al pulsar los botones (se ilumina el LED) pero los menús del Fire TV Stick no responden. En ese caso, es posible que el remote haya perdido la vinculación con la llave HDMI, así que toca volver a realizar el proceso de emparejado de los dos dispositivos. Para conseguirlo debe seguir los siguintes pasos:
- Enciende la televisión con la entrada HDMI del Fire TV Stick seleccionada.
- Colócate a menos de tres metros del dongle para poder conectar de nuevo el mando.
- Pulsa el botón de Inicio del mando durante 10 segundos ininterrumpidamente.
- A partir de ese momento la luz LED del remote tendría que parpadear, lo que provocará un mensaje en la pantalla del televisor de que todo el proceso ha funcionado sin problemas.
- El mando a distancia vuelve a estar emparejado con su Fire TV Stick original.
Un truco: si la versión del mando no tiene testigo led podemos ver si está emitiendo ráfagas infrarojos al fire-stick, con una cámara digital enfocando a la parte delantera deberíamos ver un puntito de luz blanca al pulsar cualquier tecla.
Averias del mando mas comunes
Llegados a este punto, tu mando debería estar conectado a tu Fire TV Stick y funcionando de nuevo de forma correcta. ¿No es el caso? Entonces, toca comprobar estos puntos:
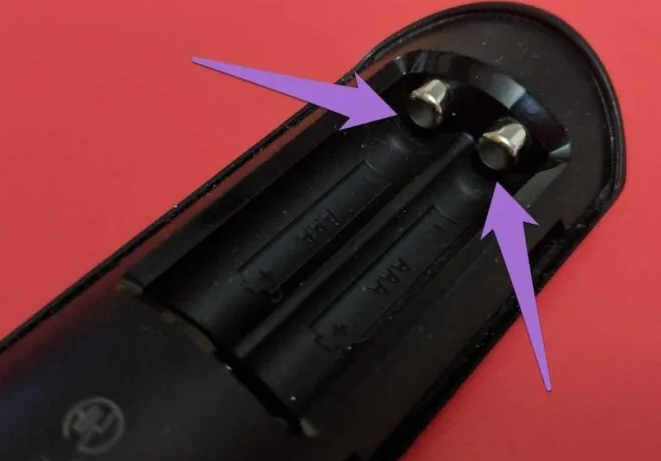
- Pilas: el mando del Fire TV Stick funciona con 2 pilas AAA. Y puede darse el caso de que se estén agotando y no tengan energía para mantener las funciones mínimas del control remoto. También puede ocurrir que alguna de las pilas ( o las dos ) se haya sulfatado y esté impidiendo que la corriente pase al mando, independientemente de que hayamos conectado una pila nueva en buenas condiciones. Simplemente, retire la tapa del compartimento de pilas y compruebe que no hay óxido ni corrosión. Aproveche también para probar con otras pilas nuevas, por si las moscas.
- Mando estropeado: los mandos a distancia suelen caerse al suelo con frecuencia, y esto puede acabar pasando factura. Si después de hacer todo este proceso, no ha conseguido volver a conectar tu mando al Fire TV Stick, puede que se haya estropeado. En este casos en el siguiente epígrafe veremos cómo podemos repararlo o en el peor de los casos conseguir un sustituto al mando a distancia del Fire TV Stick.
Las pilas del mando
Tan improbable como parece, pero a veces las baterías del mando se desalinean y por supuesto se agotan ( lo cual deberíamos probar con un comprobador de pilas o un multímetro). Saque las pilas y manténgalas fuera durante 10-20 segundos. A continuación, vuelva a colocar las pilas correctamente y conéctelas en el orden correcto en el mando como está indicado en la carcasa (compruebe que de verdad estan en su posición correcta ambas pilas).

Una de las razones más comunes por las que el mando a distancia Fire TV Stick no se acopla antes o después del restablecimiento de fábrica es que la batería está agotada o agotada, así que recomendamos que introduzca un par de pilas nuevas en el control remoto en caso de duda.
Muchas veces, la corrosión o la suciedad en el interior del compartimento de la batería impide que se active el mando a distancia correctamente. En el caso de qeu se hayan quedado pilas agotadas y se hayan sulfatado, debe retirar estas a la mayor brevedad posible y limpiar los dos conectores metálicos con un pañuelo de papel o un paño limpio. A continuación, inserte las pilas y reinicie el Fire TV Stick desenchufándolo. Entonces intente emparejarlo con el mando nuevamente.
Reparación en caso de sulfatación de las pilas
A todos nos ha pasado que hemos encontrado alguna vez un aparato que teníamos olvidado por casa y al comprobar si tenía pilas, estas se encontraban en el interior oxidadas o sulfatadas . Aunque pueda ser desagradable a primera vista, hay ocasiones en que los dispositivos sucios por las pilas todavía funcionan. En nuestro caso, si tras la limpieza en profundidad del porta pilas accesible desde el exterior, sigue sin responder, deberemos intentar abrir el mando para limpiar el interior.
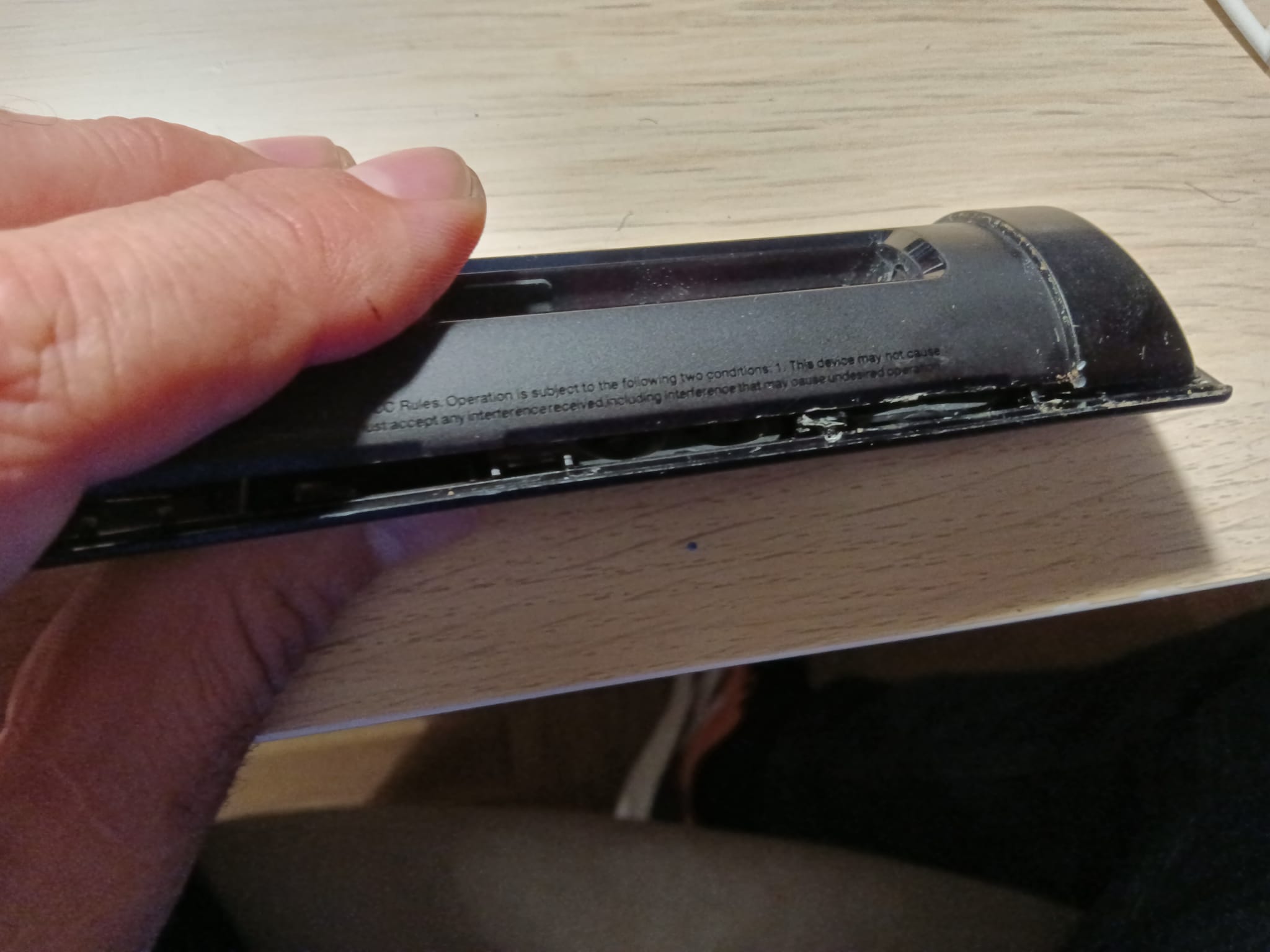
Se abre el mando por el lateral con un utensilio de plástico.
Vemos dos tornillos philips que fijan la placa madre a la carcasa.

Desatornillamos los tornillos para poder limpiar la parte más expuesta.
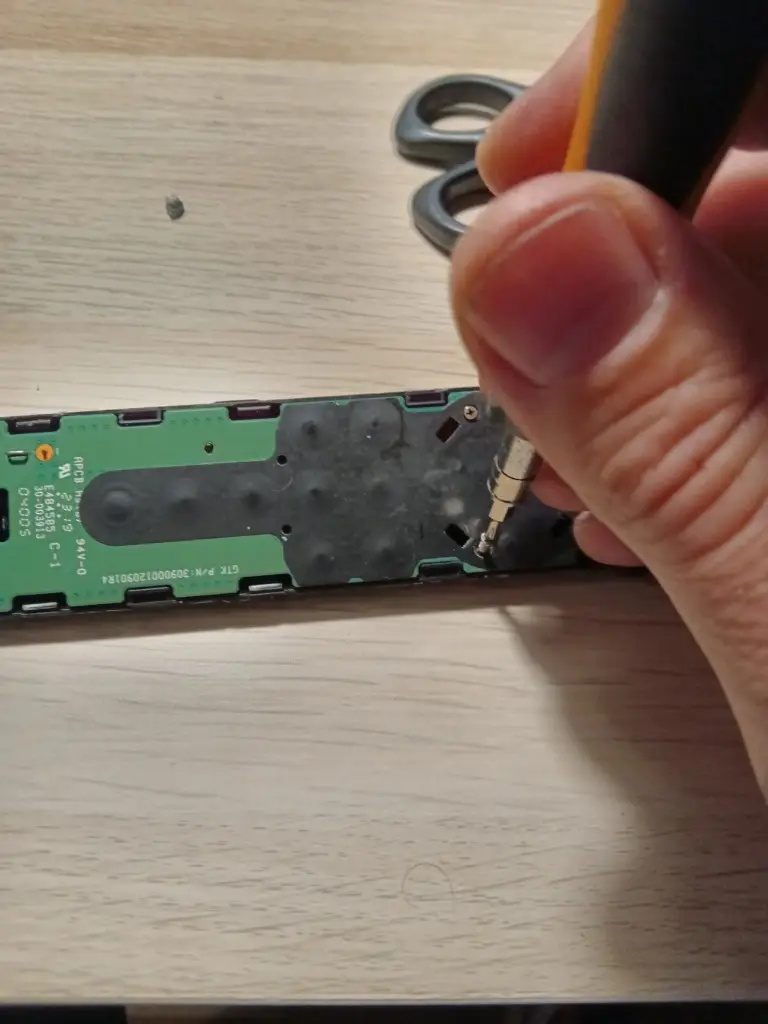
Guardamos o apartamos las carcasas con cuidado.

En nuestro caso, vemos como la sulfatación ha afectado a gran parte de la placa por lo que debemos limpiar con profundidad esta parte con un bastoncillo o un cepillo y alcohol ( hay personas que también da buenos resultados el zumo de un limón disuelto en agua).
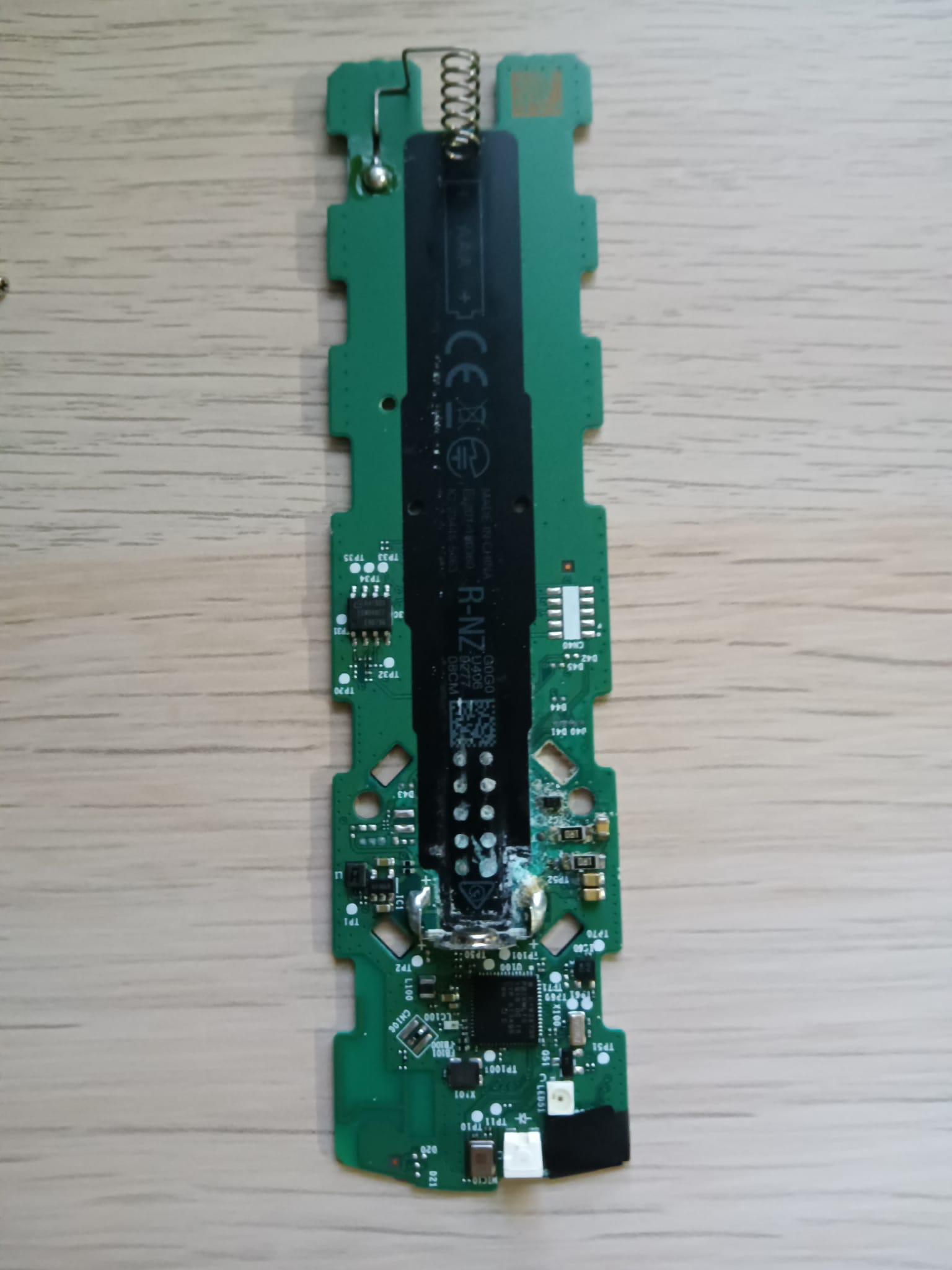
Tras frotar, comprobará cómo se irá desprendiendo lo sucio y las partes metálicas y muelles del aparato volverán a estar como nuevos. En el caso de que tras limpiarlo y secarlo siga igual, lamentamos decirle que tendrá que valorar el estado interno del aparato o ir a un servicio técnico, aunque lo habitual es que vuelvan a funcionar tras esta limpieza.

También en el peor de los casos si tras la limpieza no ha funcionado el mando podemos intentar con una pistola de calor incidir en las zonas donde estaba la suciedad para intentar reactivar las soldaduras que podrían haberse dañado con la sulfatación de las pilas.
¿Y si pierdo el mando o está roto?
Si pierde el mando de su Fire TV Stick, o si simplemente, deja de funcionar ( y no ha funcionado nada de lo que hemos visto hasta aquí), puede controlar el dispositivo directamente desde la aplicación Fire TV, disponible tanto para Android como para el iPhone. Por supuesto, también va poder utilizar comandos de Alexa para controlar el televisor, aunque, si ya lo ha hecho con anterioridad, sabrá que esto no es lo óptimo.
Y bien, aunque existen las alternativas de software, seguro que no tiene ganas de comprar otro Fire TV únicamente por recuperar el mando. Puede que una mala caída haya dejado tu mando totalmente fuera de combate, que simplemente haya dejado de funcionar de un día para otro o que sencillamente, el dispositivo haya desaparecido de casa —o que se lo haya tragado el sofá, cosa que descubrirás dentro de unos meses.
Para estos casos, existen mandos genéricos que pueden hacerte el apaño. No obstante, en Amazon también va a poder encontrar el mando original del Fire TV Stick en caso de que lo necesites. Antes de hacerse con un sustituto, confirme que el modelo que va a comprar sea compatible con su dispositivo, luego, simplemente tendrá que emparejar el nuevo mando con tu Fire TV tal y como te hemos explicado en las líneas anteriores.
Recambio original de mando para Fire TV
Este mando solo le merecerá la pena en el caso de que tenga un Fire TV 4K, debido a que su precio es bastante alto pues por prácticamente su precio, puede comprarse otro Fire TV Lite o estándar. No obstante, es el modelo que le va a garantizar el máximo de compatibilidad con tu dispositivo de Amazon. A pesar del precio, si no quiere complicarte la vida, esta es la mejor opción que va a encontrar.

Mandos genéricos
Existen también mandos genéricos compatibles con los Fire TV. En estos casos, puede ocurrir que se asocien con el dongle de una forma distinta al modelo original. Por lo general, es interesante un mano con micrófono para no perder así la posibilidad de dictar texto y hacer comandos de Alexa. Un modelo muy interesante es el L5B83H, que tiene un buen precio y va a permitir recuperar el control de su Fire TV. Por lo general, este modelo merece más la pena si tiene un Fire TV Stick de los básicos. No obstante, en algunos casos le merecerá más la pena comprar un dongle completo simplemente por precio.

Eso sí, con los mandos genéricos hay que tener algo más de cuidado. Le recomendamos que mire bien las especificaciones para garantizar que el mando genérico es compatible con su Fire TV. Si no recuerda bien qué modelo tienes conectado a tu televisor, puedes mirarlo desde ajustes utilizando la aplicación de Fire TV para el móvil. No obstante, también puede consultar en el historial de compras de Amazon para ver exactamente qué unidad tiene.







Debe estar conectado para enviar un comentario.