Los ADAS , cuyas siglas provienen de Advance Driver Asistance Systems o traducido al español » Sistemas de Asistencia a la Conducción» se han convertido en la revolución en materia de seguridad activa del vehículo. Incidiendo en la prevención de los siniestros, se ha convertido en una asistencia clave para evitar accidentes o mitigar sus consecuencias.
La electrónica en el sector automotriz es una campo de expansion gracias a mayor número creciente de seguridad, dispositivos de entretenimiento o asistencia de conductor destinados todos ellos en convertirse en estándares en vehículos nuevos.
Como tal, muchos sistemas han sido desarrollados para ayudar en la conducción y a reducir el riesgo de accidente de vehículo, tales como sistema de advertencia de salida de carril (LDWS), sistema de Control de crucero adaptativo ,etc
La tecnologia de visión artificial reconoce el medio en el que el vehículo circula identificando a todos los usuarios de la vía como peatones, ciclistas, motocicletas y otros vehículos, así como identificando las señales viales de carril, señales de velocidad y diferentes señales de tráfico.
Estos sistemas interpretan la circulación con respecto a la vía y viandantes asistiendo en tiempo real con notificaciones al conductor en situaciones de peligro ayudando a reaccionar para evitar la colisión o mitigar sus efectos.
Se ha demostrado un 95 % de reducción del riesgo de colisión frontal y un 60 % en el resto de colisiones así que no es de extrañar que muchos coches salgan de serie con estas prestaciones
Hablando de sistemas ADAS, citamos aquí los principales:
- FCW (advertencia de colisión delantera) ayuda al conductor a mantenerse a una distancia segura del vehículo delantero y alerta a los conductores de una colisión inminente con advertencias visuales y audibles, con hasta 1,5 segundos de anticipación.
- UFCW (advertencia anti-colisión de baja velocidad) notifica al conductor si la distancia al vehículo delantero es inferior a 2 m. FCW se activa cuando la velocidad es superior a 40 km / h. UFCW se activa a 1 ~ 30 km / h.

-
- LDW ( ADVERTENCIA DE SALIDA DE CARRIL)- Monitorea las marcas del carril y avisa al conductor con advertencias visuales y audibles cuando ocurre una salida involuntaria del carril sin la notificación de la señal de giro.

- HMW( VIGILANCIA Y ADVERTENCIA DEL AVANCE DE PISTA)- Mide la distancia al vehículo que está por delante («headway») en segundos. Ayuda al conductor a mantener una distancia segura de conducción. Alerta al conductor al entrar en una zona predefinida de «avance peligroso»
.
- FVSA (ALARMA DE INICIO DEL VEHICULO DELANTERO ) Notifica al conductor si el vehículo delantero comienza a avanzar en el estado parado completo y el coche del conductor no se mueve en 2 segundos.

Aunque existen interesantes proyectos que intentan abarcar el procesamiento de imágenes con placas de propósito general como por ejemplo usando una Raspberry Pi 3 ( proyecto Pi-ADAS ),lo cierto es que ya existen actualmente en el mercado soluciones bastantes asequibles con un buen nivel de características ,prestaciones y opciones que pueden satisfacer prestaciones ADAS integrádandolas dentro de las famosas cámaras de conducción par automóviles
Veamos algunas de las opciones disponibles en el mercado:
Merrill 1296P

Esta cámara WiFi con 170 ° de gran angular cuenta con visión nocturna y un sensor de 15 megapíxeles con soporte de tarjetas de 32 GB
Con la función Wi-Fi permite compartir en cualquier momento mediante una app ( se llama Wi-Fi Camera Viewer ) y reproducir/eliminar/descarga vídeos e imágenes fácilmente y libremente.
Grabación de alta resolución de rendimiento más allá de su imaginación: Super 1296p, pueden fijarse con cámara trasera (Dual-Channel puede referirse a ASIN b01j0qy6ng), 30 fps, tecnología de compresión de vídeo H.264, 6-layers ultra gran angular de 170 grados lente de cristal, F1.8 aberturas obtener Full 6 Lane cobertura con visión nocturna de primera clase, WDR y 15 megapíxeles puede ofrecer imágenes más claras y de mayor calidad.
Uso sensor de gravedad alta sensibilidad y soporta grabación en bucle, detección de movimiento, monitor de estacionamiento
Cuenta con sistemas de asistencia adas (Advanced Driver) para garantizar la seguridad de conducción trayendo una nueva experiencia de conducción ( aunque el fabricante no especifica cuales).
El sitio web de Merrill explica que admite soporte de 32 GB Class10 o superior soportando hasta 128 G TF tarjeta de Max. Se entrega de regalo una original de 32 GB tarjeta que puede almacenar hasta 6 horas de vídeos.
Se pueden conectar las 2 cámaras simultáneamente de modos que en el momento en que se conecta la cámara trasera con el cable, automáticamente graba con las dos cámaras a la vez. Se puede poner esta en el interior, pero se recomienda ponerla en el cristal trasero para ver el exterior. La cámara trasera tiene 4 leds siendo el cable lo suficientemente largo, pero es necesario conectar otro cable para alimentar los leds a una toma de corriente como por ejemplo las luces de marcha atrás (pero no es necesario de todas formas pues con la propia luz de marcha atrás del coche, la cámara tiene suficiente luz para grabar en plena noche).Si conecta la segunda cámara se pueden grabar solo 4 horas y media de tiempo de conducción con una tarjeta de 32GB antes de que se pierdan las grabaciones anteriores (54 archivos de 5 minutos de longitud para el frente y la parte posterior) y que está utilizando uno de los formatos más pequeños.
El diseño especial hace que realmente quede oculta, pero la posición del mini USB puede que sea la ideal ya que está orientada hacia la parte posterior del vehículo.
La calidad de la imagen en la pantalla pequeña desde la cámara frontal es notablemente buena pero la exterior no lo es tanto.
Especificaciones
Ángulo de visión: 170 °
Voltaje de funcionamiento: DC 12V ,consumo ≤ 0,5A
Almacenamiento: 4G eMMC
Memoria de alta velocidad: DDR3-1G
Capacidad de almacenamiento: TF Tarjeta del 512M a 32G
Altavoz: 4Ω 2W Altavoz incorporado
Resolución de vídeo: Super 1296p
Entrada audio video: Micrófono incorporado de la alta sensibilidad camara trasera: si Pantalla= SI
App movil=si
En resumen es una unidad pequeña muy versátil ( no olvidemos que incluye una segunda cámara para atrás) , que no ocupa mucho espacio en el parabrisas y tiene una lente gran angular con una excelente vista de la carretera. Es muy fácil de instalar y tiene un cable muy largo para rodear el parabrisas en lugar de simplemente caer sobre el tablero.
Es la opción mas económica (78,82€) pues ademas incluye una SD y una cámara exterior. Se puede comprar en oferta en Amazon por menos de 87€
CACAGOO ADAS

CACAGOO ADAS es un sistema de advertencia de colisión delantera y de salida de carril con un grabador de vídeo digital (DVR) incorporado a 720p con gran Angular Grabación en bucle , Visión Nocturna que ademas cuenta con una APP para iOS 9.0 and Android 4.1 o superior
Esta es una cámara para ponerla en el parabrisas del coche por dentro. Nos va a servir para grabar con vídeo en HD y hacer fotos por si tenemos algún accidente . Cuenta ademas con una antena GPS para controlar la velocidad y avisarnos en caso de poner límite.
Una de las funciones que tiene y de las más importantes es el asistente ADAS. Tiene sensores que nos dice cuando nos aproximamos mucho al coche de delante y otro que nos detecta cuando nos salimos del carril. Tambien detecta la líneas de la carretera y nos avisa si nos salimos.
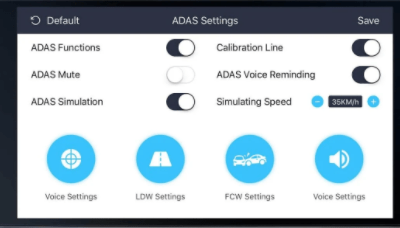
Con el ADAS (Advanced Driver Assistance Systems), avisará a los conductores con alertas visuales y audibles FCW, UFCW, LDW y FVSA en tiempo real si se detecta una colisión inminente o una salida de carril no deseada.
Cuenta con dos indicadores LED: rojo (para el trabajo del sistema) o verde (para el trabajo de DVR) :
FCW: General / Estándar / Sensible (0.9s / 1.2s / 1.5s)
LDW: General / Estándar / Sensible
Con la aplicación CACAGOO gratuita (disponible en App Store y Google Play), puede ver y configurar las informaciones de ADAS y DVR en su teléfono móvil en tiempo real. Soporta la captura de pantalla, reproducción y uso compartido de archivos grabados.
Algunas de las prestaciones de la app:
- Comprobación en tiempo real en el menú del DVR en cualquier momento y controlar la grabación de encendido / apagado libremente
- En tiempo real sonido de alerta: de cambio de carril, distancia del vehículo hacia adelante demasiado cerca voz para recordar
- Puede tomar fotografías de la situación de la carretera, el paisaje carretera en cualquier momento que desee
- Se puede comprobar los archivos de vídeo en el móvil, en cualquier momento
- Archivos de vídeo DVR estarán bloqueados y no se eliminarán de forma automática si se protege
- Calibración automática antes de conducir
- Ajuste de los datos de preaviso
- Graba audio
Especificaciones
- Ángulo de visión: 100 °
- Voltaje de funcionamiento: DC 12V ,consumo ≤ 0,5A
- Chipset: CPU-Cortex A7, dual core, GPU-Mali400MP2
- Almacenamiento: 4G eMMC
- Memoria de alta velocidad: DDR3-1G
- Capacidad de almacenamiento: TF Tarjeta del 512M a 32G
- Altavoz: 4Ω 2W Altavoz incorporado
- Resolución de vídeo: 720p 30fps
- Entrada audio video: Micrófono incorporado de la alta sensibilidad
- Formato de almacenamiento de archivos: TS / TXT, JPEG
- Pantalla= NO
- App movil=si
Lo que mas llama la atencion aparte de la facilidad de montaje es que es una de las camras con mas prestaciones ADAS y que ademas se pueden ajustar desde una app, dado que el resto de apps se limitan a controlar o inspeccionar el contenido de las cámaras ,pero no permiten ninguno otro tipo de a ajuste en el resto de funcionalidades.
Según muchos usuarios opinan en cuanto a prestaciones adas , es por tanto una de la mejores opciones en cuanto relación calidad/precio aunque no cuente con pantalla propia dado que es suplida por la app
Cuesta menos de 90€ en Amazon
Viofo A119S
Esta cámara es todo lo que se puede buscar en una dash cam, precio ajustado, calidad de imagen en distintas resoluciones, tamaño compacto, módulo gps aparte, función timeshift para sacar imágenes cada X tiempo o grabar vídeos por tramos de tiempo y funciones avanzadas de detección de cambio de carril o de distancia con el vehículo que nos precede.
Muy acertádamente utiliza dos supercondensadores ( de los que hemos hablado en este blog) en lugar de baterías , lo cual la hace mas segura que una batería de litio pensando en las altas temperaturas del verano

Las grabaciones de día son de muy buena calidad y la resolución es más que suficiente.
Existe una versión con GPS que en principio permite visualizar la ruta grabada por Google Maps o Google Earth
Respecto a la ayudas ADAS, incluye un conjunto de alertas activadas mediante algoritmos de visión artificial entre los que están detección cercana del vehículo delantero,alerta por cambio de carril, etc. pero los usuarios comentan que pueden resultar algo molestos al conducir en ciudad ya que saltan avisos/alertas frecuentemente debido a las aglomeraciones y la cercanía entre los vehículos , pero en autopistas y autovías las alarmas pueden ser de lo mas mas útil.
Especificaciones
- Ángulo de visión: 135 ° (F1.6 de apertura)
- Voltaje de funcionamiento: DC 12V
- Chipset:Novatek NT96660
- Almacenamiento: 4G eMMC
- Memoria de alta velocidad: DDR3-1G
- Capacidad de almacenamiento: TF Tarjeta del 512M a 32G
- Resolución de vídeo: fulll hd1080P 60FPS/30FPS
- Formato de almacenamiento de archivos: TS / TXT, JPEG
- Pantalla= 2.0
- App movil=si
- GPS:opcional
En resumen como sistemas ADAS es una de las mejores camaras ‘dashcam’, y quizás la que tiene la mejor relación calidad/precio. porque según la opinión de muchos usuarios tiene mejor calidad de imagen en grabaciones nocturnas y no debemos olvidar las alertas que incluso podrian salvarnos las vida.
Se puede comprar desde aqui (menos de 70€ en oferta)
ASUS RECO Classic

Esta camara cuenta con tecnología HDR para capturar imágenes con un gran nivel de detalle en entornos con mucho contraste o una iluminación limitada grabando en Full HD 1080p a 30 FPS con una lente gran angular de 140 grados
Incluye sensor de gravedad incorporado que activa la grabación de emergencia si se sufre una colisión.
Funciones de seguridad ADA integradas: aviso de colisión frontal y salida de carril.( Lane Departure System y Forwar Colision Warnig System)
No interfiere con otros sistemas para coche y cuenta con certificaciones de numerosas agencias internacionales.
Detector de velocidad basado en GPS* que avisa al conductor para que mantenga una velocidad segura.
Especificaciones
- Grabación video Full HD con un ángulo de 140°
- G-sensor para la protección automática de archivos y grabación de video
- Pantalla LCD de 2 pulgadas
- Compatible con tarjetas micro SD
- Alimentación a través del encendedor de cigarrillos
- Diagonal de la pantalla: 5,08 cm (2″)
- Formatos de compresión de video: MOV, H.264
- GPS (satélite): Si
- Grabadora de sonido: Si
- Intervalo de temperatura operativa: 0 – 60 °C
- Resolución de cámara principal: 1920 x 1080 Pixeles
- Tarjetas de memoria compatibles: MicroSD (TransFlash)
- Velocidad máxima de cuadro: 30 pps
- Ángulo de visión de cámara principal: 140°
Quizás el precio sea algo excesivo respecto el resto de cámaras ( 160€) ,pero hemos de entender que la calidad de ese fabricante es indiscutible
Lo puede encontrar en Amazon aqui
THINKWARE F770

Esta Dash Cam tiene un sensor de 2,19 MPy 140 ° ángulo de visión, que graba en Full HD 1080p a 30 fotogramas por segundo.
Permite el ccceso y control de la cámara desde su teléfono con WiFi gracias a que intehra Wi-Fi que le permite utilizar la app de thinkware( disponible para iOS y Android ) para modificar la configuración, ver la grabación en directo desde la Dash Cam, o revisar descargar metraje guardados en la tarjeta microSD desde la Dash Cam
Logra el 1000% de visión en condiciones de poca luz. Incluso cuenta con súper visión nocturna integrado permitiendo hasta 1000% mayor visibilidad en condiciones de poca luz con innovadora tecnología de procesamiento de señal de imagen (ISP)
Cuenta con alertas para mantenerle consciente de los posibles peligros mejorando su seguridad tales como la advertencia de salida del carril, adelante, y alertas de vehículo advertencia de abandono.
Gracias al GPS y a la cámara frontal también ofrece advertencias de colisión, así como la capacidad de ver su lugar a través de Google Maps junto con su grabaciones cuando se utiliza el visor de PC.
Especificaciones
- Grabación video Full HD con un ángulo de 140°
- G-sensor para la protección automática de archivos y grabación de video
- Procesador A7 Ambarella
- Pantalla LCD de 2 pulgadas
- Compatible con tarjetas micro SD
- Alimentación a través del encendedor de cigarrillos
- Diagonal de la pantalla: 5,08 cm (2″)
- Formatos de compresión de video: MOV, H.264
- GPS (satélite): Si
- Grabadora de sonido: Si
- Camara principal :2.19MP
- Resolución de cámara principal: 1080P
- Tarjetas de memoria compatibles: MicroSD (TransFlash)
- Velocidad máxima de cuadro: 30 pps
- Ángulo de visión de cámara principal: 140°
El precio es lo peor : casi 240€. Si le interesa esta en Amazon aqui
Senwow Dash Cam

Esta cámara cuenta con ADAS (Advanced Driver Assistance Systems) en dos aspectos ; Las alarmas LDWS (sistema de advertencia de abandono del carril) y FCWS (Sistema de advertencia de colisión frontal) las cuales nos hacen consciente del peligro a tiempo, recodando efectivamente al conductor situaciones potencialmente peligrosas especialmente en situaciones de fatiga prolongada. o novato
Graba en 1296P Super HD gracias a la CPU Ambarella A7 grabando en 2304×1296 a 30 fps. Permite por tanto capturar claramente los números de matrículas, aumentando la calidad del video en un 44% comparado con 1080P, proporcionando evidencia perfecta en disputas .
Incluye lente de vidrio de 6 capas y WDR (Wide Dynamic Range),que garantizan una excelente visión nocturna para una conducción segura durante la noche.
Soporta activación por G-sensor, que guarda y bloquea los archivos de grabación DVR para evitar que se sobrescriba el vídeo durante un incidente, ayudando a negar cualquier reclamo falso.
Como otras cámaras, cuenta con grabación de bucle, detección de movimiento, monitor de estacionamiento, marca de tiempo, WDR, ayudando a proteger su automóvil tanto al conducir como al estacionarse, brindando una experiencia de conducción maravillosa y segura.
Se enciende y apaga con el motor, la vista de gran angular de 170 ° nunca perderá un pequeño detalle, asegurando la seguridad de su automóvil.
Especificaciones
- Grabación video Full HD con un ángulo de 170°
- G-sensor para la protección automática de archivos y grabación de video
- Procesador CPU Ambarella A7
- Pantalla LCD de 2 pulgadas
- Compatible con tarjetas micro SD
- Alimentación a través del encendedor de cigarrillos
- Diagonal de la pantalla: 5,08 cm (2″)
- Formatos de compresión de video: MOV, H.264
- GPS (satélite): NO
- Grabadora de sonido: Si
- Camara principal :2.19MP
- Resolución de cámara principal: 2304×1296 a 30 fps
- Tarjetas de memoria compatibles: MicroSD (TransFlash)
- Velocidad máxima de cuadro: 30 pps
- Ángulo de visión de cámara principal: 140°
- Camara trasera:NO
Si le interesa esta en Amazon aqui
DVR cámara/cámara trasera, Y56
Este DVR cuenta con GPS, grabando con cámara con doble en Full HD 1080p y cuenta con ayuda a la conducción Adas LDWS.
Soporta visión nocturna con un angulo de 170 grados , es decir en apariencia parece tener las maximas prestaciones al mínimo precio
La óptica frontal cuenta con gran angular de 170 grados utilizando alta temperatura por lo que no cambia el color, gracias a la tecnologia de corrección de deformidad avanzada , reduciendo considerablemente la flexión de la imagen, por lo que la calidad es más perfecta.
Cuenta con tratamiento HDR High Dynamic de modo que puede sintetizar imágenes de alta calidad con eficacia haciendo la reproducción mas optimas para los colores oscuro.
Soporta visión nocturna HD 1080 p en sus dos cámaras con ayuda de luces de LED que mejoran la luminosidad por 60%, para conseguir realmente buen HD. a
Cuenta con asistencia ADAS cuando el vehículo se desvia de las lineas de la carretera , el sistema detecta rápidamente y emitirá un sonido de ATENCIÓN
También emitirá alarma cuando la distancia sea demasiado corta entre el coche delantero y el trasero.
Detiene la grabación cuando el frontal de la cámara de vigilancia de estacionamiento hay objetos fijos, pero cuando un objeto se mueve automáticamente pueda abrir el video,
G-sensor: asegura el bloqueo de los archivos cuando sea necesario, para evitar ser borrados o manipulados
Grabación en bucle:graba video en bucle hasta ocupar la totalidad de la memoria
Visión nocturna: llena automáticamente en la luz para permitir una remoción de grabaciones en entornos oscuros.
Soporte reproducción: se puede ver el vídeo grabado con las marcas de posicion del tracke r(GPS DVR.)
Especificaciones
- Grabación video Full HD con un ángulo de 170°
- G-sensor para la protección automática de archivos y grabación de video
- Pantalla LCD de 3 pulgadas
- Compatible con tarjetas micro SD hasta 32GB
- Alimentación a través del encendedor de cigarrillos
- GPS (satélite): Si
- Grabadora de sonido: Si
- Camara principal (1920 * 1080 P),
- Cámara de visión trasera (720 * 480 p)
- Tarjetas de memoria compatibles: MicroSD (TransFlash)
- Velocidad máxima de cuadro: 30 pps
El precio es lo mejor : casi 82€ pero como ve no hay demasiada información en detalle de las posibilidades que ofrece. Si le interesa esta en Amazon aqui

![IMG_20180121_174932[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1749321.jpg?w=636)
![IMG_20180121_175512[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1755121.jpg?w=636)
![IMG_20180121_180029[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1800291.jpg?w=636)
![IMG_20180121_181759[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1817591.jpg?w=636)
![IMG_20180121_182732[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1827321.jpg?w=636)
![IMG_20180121_183220[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1832201.jpg?w=636)
![IMG_20180121_183527[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1835271.jpg?w=636)
![IMG_20180121_190023[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1900231.jpg?w=636)
![IMG_20180121_190906[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1909061.jpg?w=636)
![IMG_20180121_191135[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180121_1911351.jpg?w=636)

Debe estar conectado para enviar un comentario.