Es típico entre los aficionados contar con un económico soldador instantáneo también llamadas «pistolas de soldar » para realizar soldaduras rápidas (suelen calentarse en menos de 15 segundos ) o incluso para soldar componentes mas grandes
Es fácil que este tipo de soldador , siendo incluso de calidad ( por ejemplo de la famosa marca de herramientas Einhell ) no llegue a los 18€ en Amazon ,por lo que es también fácil de deducir que a la mayoría de los fabricantes no les resulta interesante vender repuestos para estos ,
El sistema de calentamiento de estos soldadores se basan en un transformador cuyo secundario está formado por muy pocas espiras de cobre de gran sección, con lo cual la tensión es muy baja ( similar a un soldador por puntos ) pero la intensidad se disparará a muchas decenas de amperios.
En este caso, resistencia y punta es todo lo mismo, ya que dicha corriente circula por el interior de la propia punta, calentándola por pura resistencia óhmica y por tanto sin demasiados problemas de transferencia de calor.
Uno de los típicos problemas de estos soldadores se debe a que al no tener la punta aislada del secundario del transformador, si éste tiene algo de fugas del primario al secundario, podría inducir algo de tensión en el circuito al que se aplica, y también existe el peligro que la «espira» que forma la punta y que trabaja con corriente alterna de 50 Hz, induzca por proximidad una corriente importante en posibles bucles de conducción del circuito impreso, razón por la cual no es aconsejable utilizar este tipo de soldadores en circuitos muy delicados.
Otra de las limitaciones es que las puntas con el trabajo comienzan a degradarse de forma visible de modo que con el tiempo la degeneración es tan grande que terminan rompiéndose definitivamente.
Otro de los problemas de este tipo de soldadores que con toda probabilidad sea el causante del deterioro de la punta es el control es todo/nada. Es decir, si pulsa el interruptor manual, a la punta le llega toda la potencia, pero si suelta el interruptor no le llega nada. Cuando uno está soldando algo delicado, además de apuntar y mantener el pulso de la mano, tiene que controlar con estos soldadores la potencia, abriendo y cerrando el interruptor. Si uno mantiene el interruptor continuamente pulsado y no los suelta , la temperatura en la punta puede ser excesiva para el trabajo que se está haciendo y para la punta de modo que si no se tiene una buena disciplina de solo usarlo por pulsos es muy fácil que lo terminemos sobre calentando.
En cambio este tipo de soldadores rápidos son muy útiles, o pueden serlo pues tienen una buena potencia por ejemplo para soldar conectores o elementos grandes , y sobre todo son susceptibles de un gran ahorro energético pues no están continuamente encendidos. ya que en teoría solo consumen cuando se necesita
Si se nos termina rompiendo la punta y gastamos la de repuesto ( que casi todos incluyen )¿que hacemos si no es fácil conseguirlas en el mercado y con toda seguridad si la encuentra entre portes y envío le constara como uno soldador nuevo?
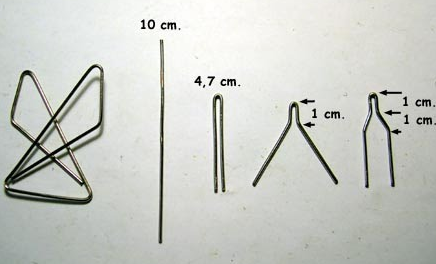
Pues no se preocupe ,ya que la solución es muy económica y sencilla : utilizar simplemente el alambre de los gruesos clips de oficina que podemos comparar en cualquier papelería (las llaman de «mariposa»y suelen costar menos de 1€)
El único trabajo sera cortarlos con un alicante de corte en trozos de unos 10 cm doblarlos por la mitad para que den la medida y la punta aplanarla un poco arreglándola con una lima de metal
Esta solución según la mayoría de las personas que la han probado funciona mejor que con las originales
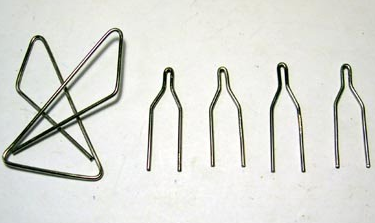
A continuación en una imagen podemos ver el simple proceso de fabricación de puntas a partir de alambre de clips sujetapapeles para oficina de mariposa:
Y lo sorprendente es que el proceso sea muy rápido :cuatro puntas acabadas en menos de 10 minutos
Con características de consumo y calentamiento son comparables al alambre normal tipo «fil de ferro», aunque al ser más rígido, cuesta un poco más el darle forma y el niquelado salte de forma inevitable en los ángulos agudos, como en la punta, pero el resultado es brillante ,fácil y muy económico.
Las baterías de fosfato de hierro y litio (LiFePO4 o LFP), son las baterías tradicionales de Li-Ion más seguras. Una característica fundamental de estas e que la tensión nominal de una celda de LFP es de 3,2V, cuando en las de plomo-ácido suele ser de 2V por celda.
Por ejemplo una batería LFP de 12,8V, por lo tanto, consiste en 4 celdas conectadas en serie; y una batería de 25,6V consiste de 8 celdas conectadas en serie.
Una batería de plomo-ácido fallará prematuramente debido a la sulfatación si:
Funciona en modo de déficit durante largos periodos de tiempo (esto es, si la batería raramente o nunca está completamente cargada).
Se deja parcialmente cargada o, peor aún, completamente descargada (yates o caravanas durante el invierno).
Por el contrario las baterías LFP no necesitan estar completamente cargadas. Su vida útil incluso mejorará en caso de que esté parcialmente cargada en vez de estar completamente cargada (de hecho esta suele ser una ventaja decisiva de las LFP en comparación con las de plomo-ácido).
Otra ventaja fundamental es su mucho mayor densidad energética ahorrando hasta un 70% de espacio y hasta un 70% de peso .
Otras ventajas interesantes de estas baterias son el amplio rango de temperaturas de trabajo, excelente rendimiento cíclico, baja resistencia interna y alta eficiencia
Como desventaja clara de las baterias de LiFePO4 o LFP, destacar que las baterías LFP son caras en comparación con las de plomo-ácido ,pero si se usan en aplicaciones exigentes, el alto coste inicial se verá más que compensado por una vida útil mayor, una fiabilidad superior y una excelente eficiencia debido a su mayor densidad energética ,razón por la cual son mucho mas pequeñas y ligeras que el resto .
En el mercado podemos encontrar baterías de iones de litio, si buscamos en profundidad , a partir de 120€(12v /10AH) por ejemplo en Amazon siguiendo este enlace
Aunque evidentemente podemos comprar la batería ya montada, vamos a ver como podemos montar nuestro propio pack de baterías de iones de litio por mucho menos precio de lo que nos ofrecen las grandes marcas , pues no necesitamos mucha experiencia, ya que la única complejidad estriba en elegir bien los componentes y ensamblarlos de forma correcta.
Para construir pues una batería de celdas necesitamos pues dos componentes esenciales:
Por un lado , un numero determinado de celdas en función de la tensión e intensidad que se precise ( las mas típicas son las del tipo 18650)
El circuito de control de carga PCB (protection circuit modules PCB/PCM/BMS/CMB) de las celdas , el cual también estará en función de la tensión e intensidad que se precise.
Seleccion del cicruito de carga para baterías de litio
Los pack de baterías Li-ion y Li-Poly siempre deben ser usadas con un circuito de protección para prevenir que las celdas tengan sobrecarga, sobre-descarga o exceso consumo. Los distintos controladores de carga se presentan con diferentes versiones dependiendo del número de células, voltaje y capacidad. Elegir el circuito correcto ( y aplicarlo) es vital para asegurar la longevidad de las baterías e incluso también por nuestra propia seguridad.Como norma general podemos seleccionar un controlador de carga en función de la tensión necesaria:
Para celdas > 5 o 18,5v li-ion packs, debería escoger un PCM con función de equilibrio para mantener cada celda en el mejor balance y otorgue un buen servicio durante su vida útil.
Para un pack de baterías Li-ion de alto voltaje (celdas > 20) debemos escoger un BMS (battery manage system) para supervisar el rendimiento de cada celda y asegurar que la batería trabaja de forma correcta. BMS (o sistema de gestión de baterías) es un sistema electrónico que controla una batería recargable monitorizando su estado, calculando los datos secundarios, protegiendo la batería, controlando el entorno y haciendo que trabaje en equilibrio.El BMS monitoriza diversos datos como:
Voltaje: Voltaje total, o voltaje individual de cada celda.
Temperatura: Temperatura media o temperatura de las celdas individuales
Estado de carga (SOC) o profundidad de descarga (DOD) para ajustar el nivel de la batería.
Estado de la salud (SOH) medidas sobre el estado general de la batería
Corriente, Entrada ó salida de la batería.
En cuanto a las especificaciones del circuito de carga, ademas de las consideraciones anterioes ,es interesante seleccionar este en función de sus especificaciones electricas como pueden ser:
Tensión de protección de sobrecarga para una sola célula: Debido a que la delicada química de la batería de iones de litio se puede dañar si se carga con una tensión demasiado alta, el PCB se encarga de cortar la corriente a las células. Esto no debería ser un problema si realizamos la carga con un cargador inteligente el cual se apagará una vez que la batería ha terminado de cargar.
Tension de protección ante descarga de una sola célula:Si el voltaje de una batería de iones de litio caé a cero, o incluso simplemente por debajo de 2 voltios, se verá seriamente perjudicada, y nunca serás capaz de volver a cargarla. Los teléfonos móviles tienen esta misma protección. Si mides el voltaje de una batería de un móvil «muerto» verás que entrega 2.5 voltios.
Protección de detección ante exceso de corriente: Sobre la protección de exceso de corriente es necesario porque un controaldor de carga es relativamente pequeño con componentes diminutos y no puede manejar demasiada corriente.
Máxima corriente de descarga continua:es la corriente máxima que es capaz de gestionar en modo descarga
Consumo de Corriente: nos indica el consumo de los componentes electrónicos en el controlador. Es prácticamente nada y no agotará en ningún caso la batería.
Protección del cortocircuito: La protección por cortocircuito significará que el controlador se apagará si detecta un cortocircuito; si un cable se desconectó , si tenemos un cable pelado,etc.
Resistencia de los circuitos de protección:Relacionado con el consumo de corriente podríamos decir que es la resistencia causada por el PCB.. Una vez más el consumo es tan pequeño que no se aprecia.
Baterías o celdas se usan indistintamente, la diferencia es que una celda es la parte más pequeña e indivisible de la batería, la cual almacena la energía y una batería puede estar hecha de muchas celdas.
La capacidad de la batería se mide en vatios hora. Para saber los Watt horas debemos utilizar la fórmula (Watts = Voltios x Amperios) para multiplicar la capacidad (en amperios hora) con tensión(voltios) para obtener X vatios hora.
Todas las celdas tienen un formato común, por lo tanto puede encontrarlas con facilidad y con precios asequibles en muchos sitios por internet.
El formato mas habitual es 18650s , cuya numeración en realidad solo corresponde a sus dimensiones físicas de 18 mm por 65 mm (medidas muy similares a una pila AA).
Las celdas nuevas de LI-ion recargables pueden costar en torno a los 8€ por cada ( tensión de voltaje: 3.6v-4.2v, capacidad: 2600mAh, salida: 4.2v, carga máxima: 1.5 , resistencia interna: por debajo 50milliohm ,tiempo de carga: 1000 veces , peso: 48 y Tamaño: 65 mm x 18 mm )
Una vez seleccionemos el numero de celdas en función de la tensión y la corriente a obtener mediante asociación de celdas en serie para obtener la tensión necesaria y en paralelo para obtener la capacidad requerida el siguiente paso será conectar todas las celdas.
La conexión eléctrica de las celdas podemos hacerlo de muchas , desde cinta aislante ó americana (aunque no es la mejor opción pues seguro que en un momento u otro se acaba soltando), con portapilas , soldándolas con estaño o incluso mediante maquinas de soldadura por puntos, que es lo que usan los fabricantes profesionales, lo cual como vamos a ver, tampoco es tan complicado:
La soldadura por puntos se basa en presión y temperatura. Dos piezas se sueldan entre si cuando una parte de ellas se calienta a temperaturas próximas a la fusión y se hace presión entre ellas. En el caso de esta soldadura el calentamiento de la pieza se hace por una alta corriente eléctrica entre dos electrodos y la presión la realizan precisamente estos electrodos en forma de pinza.
Como generalmente la resistencia de las piezas a soldar es muy baja la corriente que debe pasa por la zona a soldar debe ser muy alta del orden de los 500 amperios, pero sin embargo los voltajes son muy bajos, de 1 a 3 voltios pero la potencia total si es alta en torno a uno o dos kilovatios.
Los hornos microondas llevan un transformador de aproximadamente 2 kilovatios de potencia. El primario acepta los 220 V y tiene dos secundarios. Uno de ellos para alimentar el magnetrón suministra unos 2200 voltios eficaces, otro bobinado consiste en una o dos espiras y sirve para alimentar el filamento del magnetrón.
Al observar el transformador se puede ver que los bobinados de primario y secundario de alta tensión están perfectamente separados. El primario es de hilo mas grueso y el secundario no lo necesitamos porque además es peligroso debido a las altas tensiones que produce y además necesitamos el espacio que ocupa para el secundario de nuestra soldadura.Por ello para eliminarlo, cortar el bobinado con una sierra y extraer las espiras hasta que se quite completamente. Si tiene un carrete aislante dejarlo, nos puede venir bien aunque no es imprescindible.
El secundario que nosotros necesitamos, debe producir unos 2 voltios y unos 500 amperios aunque sea de manera temporal. Para este secundario necesitamos un par de espiras de hilo de unos 10 0 o 15 mm de diámetro. Arrollarlo directamente en el núcleo ( un par de espiras ) y su salidas a dos electrodos qeu pueden realizarse con una barra de cobre de unos 10 mm de diámetro, necesitaremos dos electrodos de unos 50 mm que limaremos mediante una lima para afilarla con forma cónica uno de los dos extremos de cada electrodo.
Téngase en cuenta que los tres voltios con que se alimentan las puntas no son peligrosos.
Por ultimo sólo falta equipar un interruptor que alimente el transformador. Lo mas sencillo es activarlo con el pie pues las manos suelen estar ocupadas sujetando la pieza.
Antes de dar paso a la corriente las piezas deben estar aprisionadas. En caso contrario las puntas chisporrotean. Después de hacer unas pruebas se puede decidir aumentar o bajar el voltaje, arrollando mas o menos espiras en el transformador. Cuando se tenga un montaje definitivo acortar todo lo posible los cables del secundario.
En el siguiente vídeo podemos verlo de una forma mas clara como es el proceso de construcción del soldador:
Una vez resuelta la conexión eléctrica de las celdas es recomendable usar algún soporte que haga de aislamiento entre las capas de baterías siendo lo mas típico usar unos anillos concéntricos de plástico con orificios del diámetro de las células que se colocan lógicamente tanto en la parte superior como la inferior
Si su pack de baterías sufre un cortocircuito, lo más probable es que se calentará de forma desmesurada, pudiendo salir incluso humo negro o ver la propia placa ennegrecida. No es extraño que pueda ocurrir y para evitarlo solo tenemos que poner una buena capa de aislamiento entre las pilas de baterías.Eso no significa que crear un pack de baterías sea un proyecto terriblemente peligroso, pero hay que tener cuidado.
En esta web encontrará diagramas de cableado y diferentes formas de cablear las baterías según configuraciones.
La primera vez que conecta todo, la preocupación por descubrir que no esta bien conectado aflora, ¿y si lo conectamos y se quema todo? Una vez completado todo el montaje tenemos que asegurarnos que todo esta bien conectado, que las baterías tienen carga y que el PCB esta activado y funciona correctamente.
Por ultimo acerca del Ratio C ,la C significa capacidad y representa lo que pasa a ser la capacidad de la batería. Si tenemos una batería de 8 amperios horas y carga a 8 amperios, entonces se está cargando a 1C de carga y podría terminar en una hora. Si carga a 2 amperios hora, como la mayoría de cargadores, entonces estaría cargando a un cuarto C, y tardaría 4 horas en cargar. Si agoto una batería de 8 amperios tendrá una duración de una hora; Eso es un consumo de 1C.




Debe estar conectado para enviar un comentario.