Cada vez son más los aficionados que se deciden a poner su inventiva e ingenio en pro de un problema concreto y le buscan una solución que comparten con todo el mundo.
En la preparación para ir en un viaje extendido por carretera se pueden tener dos requisitos principales:
- Una gran oferta de música para el viaje
- Una lectura de velocidad en vivo respaldada por GPS para que pueda determinar de forma fiable la velocidad de los coches debido a los neumáticos más grandes que ponen el velocímetro del tablero en alrededor de un 10%.
Este proyecto inicialmente se basó en una Raspberry Pi 2 (ahora actualizado a la Raspberry Pi 3 ) basado en el ordenador de coche que ejecuta Raspbian
En esta ocasión la necesidad era ( y es) complementar el sistema multimedia de un coche de unos ciertos años con un interfaz táctil de gran pantalla y de paso que puede ofrecer más información util para el conductor , tarea que ha implementado con una Raspberry Pi 3, construyendo un ordenador de coche basado en Raspberry Pi con almacenamiento de 1 TB que proporciona música, un punto de acceso WiFi en el coche y muestra la información de velocidad actual además la ubicación respaldada por un receptor de GPS
El proyecto se llama Nomadic Pi y se basa en el API de mapas Here.com utilizandose para recuperar el límite de velocidad y la información meteorológica. En cuanto al hw su creador en lugar de dictar una configuración exacta de hardware nos enseña el hw que ha usado :
- Raspberry Pi 3
- Tarjeta SanDisc 32GB Clase 10 SD
- Pantalla oficial De 7 pulgadas Raspberry Pi Touch
- Concentrador USB de 4 puertos alimentado
- Sombrero GPS Adafruit Ultimate
- SMA hembra a RP-SMA convertidor adaptador hembra (utilizado para conectar el sombrero GPS a una antena GPS externa)
- Rp-SMA a uFL/u.FL/IPX/IPEX RF Adapter Cable (utilizado para conectar el sombrero GPS a una antena GPS externa)
- Antena GPS – Antena Activa Externa – Cable de 3-5V 28dB 5 Metros
- Unidad portátil Samsung de 1 TB de 2,5 pulgadas
- Cable USB a SATA
- ZTE MF832 4G dongle
- Convertidor de voltaje de 12v a 5v 3A
- Tiras de metal y soportes angulares de la ferretería
- Pintura en aerosol negra
- Pernos de cabeza Phillips pequeños con tuercas hexagonales
Hardware
Después de disponer de r todo el hardware para construir el ordenador de su coche es un reto ponerlo todo junto en un formato que no se dañará en un coche en movimiento. La pantalla táctil oficial de Raspberry Pi tiene agujeros perforados en la parte posterior de la carcasa de la pantalla. Así que hacen un gran punto de partida para mantener todo unido. Los que están cerca del centro permiten que la Raspberry Pi acabe con la pantalla en sí. A continuación, hay agujeros roscados más cerca de las esquinas que decidí adjuntar un marco de tipo y construir hacia atrás.
Sólo un consejo : si decide seguir el mismo camino y atornillar su marco en la parte posterior de la pantalla. ¡Apriete los tornillos muy suavemente! Si aprieta demasiado la pantalla comenzará a empujar hacia fuera el lado opuesto. Así que sólo vaya muy despacio y tenga cuidado!
Luego en lugar para montar la carcasa sólo tiene que decidir lo que va a decidir lo que va a utilizar para albergarlo. En cualquier ferretería encontrara algunas tiras metálicas delgadas y soportes angulares con agujeros pretaladrados. Así que puede crear un marco utilizándolos, ya que se pueden atornillar fácilmente juntos. Este enfoque es barato, robusto y proporciona una gran cantidad de puntos de montaje prácticos para sostener periféricos (hub USB, dongles externos, etc.) en su lugar.
Las carcasas Double Din disponibles en el mercado están disponibles para montar dispositivos en el tablero. Pero es probablemente más fácil construir el marco alrededor de la raspeberry Pi y luego atornillar el marco a la carcasa para mantener las cosas en su lugar.
Alimentación
Además de albergar la Raspberry Pi tenemos que suministrar energía a todo el hw para lo cual tomaremos la potencia de 12 voltios DC del sistema eléctrico de su coche y reduciremos el voltaje. dado que la Rasbberry PI se alimenta a 5V DCm requeriremos una fuente de alimentación de 5 voltios.
Afortunadamente, los convertidores de voltaje CC de 12 a 5 voltios se pueden encontrar fácilmente en muchos Amazon :solo necesita prestarle atención a la clasificación de amperaje suministrado pues necesitará un convertidor DC/DC que pueda entregar 3 amperios o más.

Un convertidor de voltaje de 3 amperios dará un consumo de potencia máximo de 15 vatios ( 5v x 3 amperios á 15vatios). Para la configuración de hardware apuntada se estima un consumo máximo de energía de 10,44 vatios, lo cual da una potencia adicional de 4 vatios disponibles, pero si usted planea conectar una gran cantidad de dispositivos hambrientos de energía fuera del Pi sólo tenga en cuenta que la energía necesaria podría convertirse en un problema.
GPS
La antena GPS externa no es un requisito, ya que la mayoría de los dispositivos GPS (sombreros o memorias USB) tendrán una antena pasiva incorporada. Una cosa a tener en cuenta es la ubicación de instalación prevista del ordenador en el coche, sin embargo. Si el Pi va a ser montado en el salpicadero el dispositivo GPS estará rodeado en todos los lados por el acero que va a obstaculizar su ordenador conseguir una fijación GPS por lo que lo mas sensato es usar una antena GPS externa (tenga en cuenta que el uso de una antena GPS activa aumentará ligeramente el consumo de energía general del sistema ) .
Este es finalmente el aspecto que presenta el montaje completo en el salpicadero
Software
El autor de este proyecto nos proporciona una imagen de Raspbian preparada con todo el sw ya instalado que ha llamado Nomad Pi y que ha subido a Google Drive para su descarga. en este link: Nómada Pi v1.1 ( son unos 2.3GB)
Una vez completada la descarga,descomprima el archivo de imagen y escriba en la tarjeta SD con el comando dd o pruebe Win32 Image writer si está utilizando un sistema Windows.
El objetivo principal de esta versión 11 era permitir el uso del sistema fuera de las restricciones de la interfaz principal de Nomadic Pi.
Algunos de los cambios más importantes en la versión v1.1 incluyen:
- La capacidad de salir del modo de pantalla completa del navegador. Esto hace uso de la funcionalidad experimental táctil «salir de pantalla completa» en Chromium 61.
- Permitir el uso para acceder a otras aplicaciones en el sistema o navegar por Internet en el Pi nómada como un ordenador de sobremesa estándar.
- La adición de software de navegación GPS Navit para proporcionar funcionalidad de navegación giro a giro.
- La posibilidad de entrar en el modo de «pantalla completa» en el navegador a través de la pantalla táctil cuando se desee utilizando un elemento de menú en el menú de la aplicación Nómada Pi.
La interfaz en sí está construida con el marco Ionic basado en AngularJS y se ejecuta dentro del navegador Chromium en modo quiosco.
Sw navegación
El ordenador del coche Nomadic Pi hace uso de algunas fuentes de datos externas para enriquecer la experiencia en carretera.Estos son:
- Here.com – Información de límite de velocidad específica de ubicación y datos meteorológicos
- LocationIQ – Información de direcciones legibles de los datos de latitud y longitud
Estos servicios como puede intuir requieren que el Pi nómada tenga una conexión a Internet activa, razón por la que precisamente en este montaje se usa un dongle ZTE MF832 , aunque en realidad podría conectarse a un red MIFI por ejemplo compartiendo la conectividad de nuestro smartphone
Para obtener claves de API necesarias, vaya al portal para desarrolladores here.com y regístrese para recibir una clave de API y un identificador de aplicación. La cuenta es gratuita y el acceso a sus servicios de datos es gratuito para menos de 15000 solicitudes al mes (que permite una solicitud cada 2,9 minutos).
Una vez que lo haya hecho, here.com id de aplicación y clave de API. Edite la configuración de la aplicación Nomadic Pi. Esto se puede encontrar en:
- /home/pi/Software/car-computer/config/config.ini
Introduzca sus datos en la sección etiquetada [here-api]. Guarde los cambios y, a continuación, reinicie el Pi nómada para que los cambios surtan efecto.
Para usar el servicio de geocodificación inversa locationIQ, primero registre una cuenta para recibir un token de desarrollador. El token permite hasta 10.000 llamadas a la API al día de forma gratuita.
Después de recibir el token de desarrollador. Añádalo a la configuración de la aplicación Nomadic Pi bajo el encabezado [location-iq].
Cómo conectarnos a Noma pi
Si se usa un dongle 4g podemos compartir la conexión vía Wifi. Para ello ,el acceso WIFI ,lo conseguiremos una vez que el sistema haya terminado de arrancar. La forma más fácil de configurar el sistema es conectarse a través del punto de acceso WIFI.
SSID: Nomadic-PI
WPA Contraseña: pinomadica
Para cambiar la configuración de WIFI desde el valor predeterminado. Inicie sesión en Pi sobre SSH elevar a privilegios raíz. A continuación, edite el archivo de configuración hostapd.conf en el directorio /etc/hostapd.
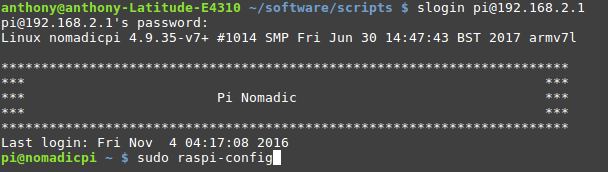
En cuanto al acceso SSH, una vez conectado al ordenador del coche a través de WIFI,p uede iniciar sesión en Nomadic Pi en 192.168.2.1 con las siguientes credenciales:
Nombre de usuario: pi
Contraseña: pinomadico
Después de iniciar sesión como usuario pi, puede usar sudo para elevar a privilegios raíz.
En este momento si su ordenador de coche tiene una conexión a Internet a través de Ethernet o un dongle 4G. Sería una buena idea actualizar los paquetes instalados en el sistema a la última y mejor:
apt-get actualización
apt-get actualización
Adición de música
De forma predeterminada, MPD está configurado para buscar música en /media/usbstick. Si desea que la música se reviva en otro lugar del sistema de archivos, tendrá que cambiar el directorio de música en los archivos de configuración MPD.
Lo más probable es que almacene la música en un dispositivo de almacenamiento separado que la tarjeta SD que contiene el sistema operativo. Si este es el caso, necesitará agregar una línea a su archivo /etc/fstab. Así que el dispositivo está montado en el arranque del sistema y el demonio MPD puede ver su colección de música.
Al igual que los propios archivos de música, las listas de reproducción se almacenan en los archivos /var/lib/mpd/playlists como archivos .m3u. La configuración MPD tendrá que cambiar si desea almacenarlos en una ubicación diferente.
Conclusión
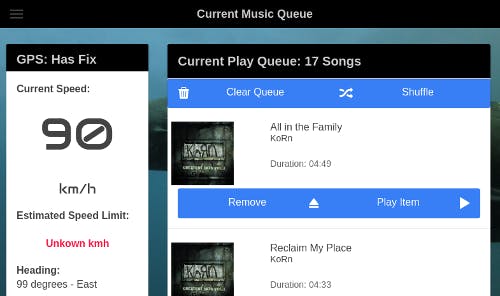
Estamos ante un interesante proyecto que hace una vez más uso de la Raspberry Pi como hw casi único para toda la funcionalidad demandada. Los archivos multimedia se almacenan en un disco duro de 2,5 pulgadas y 1 TB con el demonio MPD que controla la reproducción de música. El dispositivo GPS permite una lectura en vivo de la velocidad y la ubicación actuales de los coches. Incluso en la página de inicio tendremos advertencias de velocidad al exceder el límite de velocidad.
Quizás se podría poner una única pega en cuanto a funcionalidad pues el autor se ha limitado al entretenimiento o al velocímetro descuidando otros aspectos que definitivamente se pueden obtener en una Raspberry PI ( por ejemplo añadiendo sensores de aparcamiento, cámaras frontal y trasera con reconocimiento de imágenes ,procesamiento de alarmas con el GPIO , etc ) que seguro la distanciarian de una tableta corriendo Google Play Auto ( que es básicamente la funcionalidad actual)
El proyecto ahora tiene su propio sitio en https://www.nomadicpi.com donde se puede encontrar información sobre la construcción de su propio Pi nómada. Junto con una imagen preconstruida para descargar para su Raspberry Pi 3.
La interfaz de usuario del proyecto todavía está en desarrollo activo con nuevas características que se agregan de forma regular. Con la base de código disponible libremente en github para su descarga bajo una licencia GPL V3.

Deja un comentario