Una máquina de grabado láser es una herramienta que utiliza el láser para hacer grabados sobre un objeto blando como puede ser madera,cuero , plasticos ,etc.
Antes de explicar como Davide Gironi ha montado una pequeña grabadora láser casera reciclando un viejo escáner y una impresora matrozial , debe saber que los diodos láser Clase IIIb que se emplean en este proyecto, emiten radiación láser visible e invisible y son extremadamente peligrosos. Su luz de hecho puede causar daños permanentes en los ojos, asi que nunca debe mirar al diodo trabajando( incluso sin la lente) y por supuesto tampoco apuntar a una superficie reflectante, pues el haz de láser puede causar quemaduras o incendios.

El autor tenia un viejo escáner roto y una vieja impresora por ahí. Inspirado por este proyectoinstructables decidió construir una versión más grande de mi pequeña CD-ROM grabador láser basado,usted puede encontrar aquí.De esta manera, el área de grabado podia llegar acasi 212mm x 274mm.
El eje Y es construir mediante el ensamblaje de un viejo escáner y el eje X utilizando una vieja impresora .
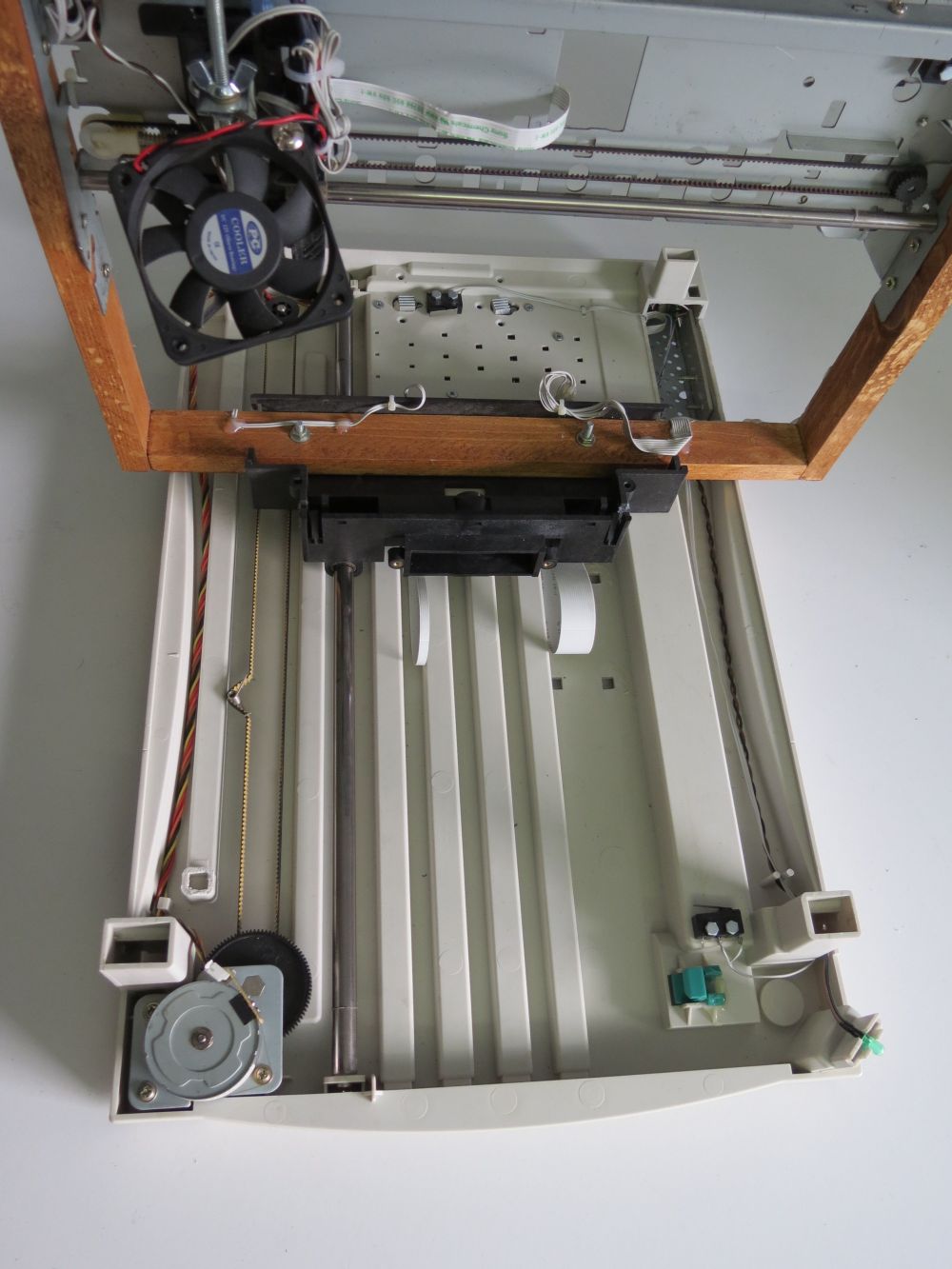
La base de esta máquina es el propio escáner y el escáner de este fue completamente eliminado , todos excepto el motor y el mecanismo de movimiento. Lo mismo se aplica para la impresora.
Montaje del hardware, prestar atención a construirlo hacer X normal al eje Y. Los dos dirección tienen que ser perpendiculares, o su grabado tendrá distorsiones.
El mecanismo de la impresora que está conectada a el ensamblaje del escáner del eje Y, de esa manera, el láser deja atrás la pieza en el momento del grabado.
Grabador resultante es alimentado por una fuente de alimentación de 12V 2A, aunque la corriente total absorbida es 700mA.
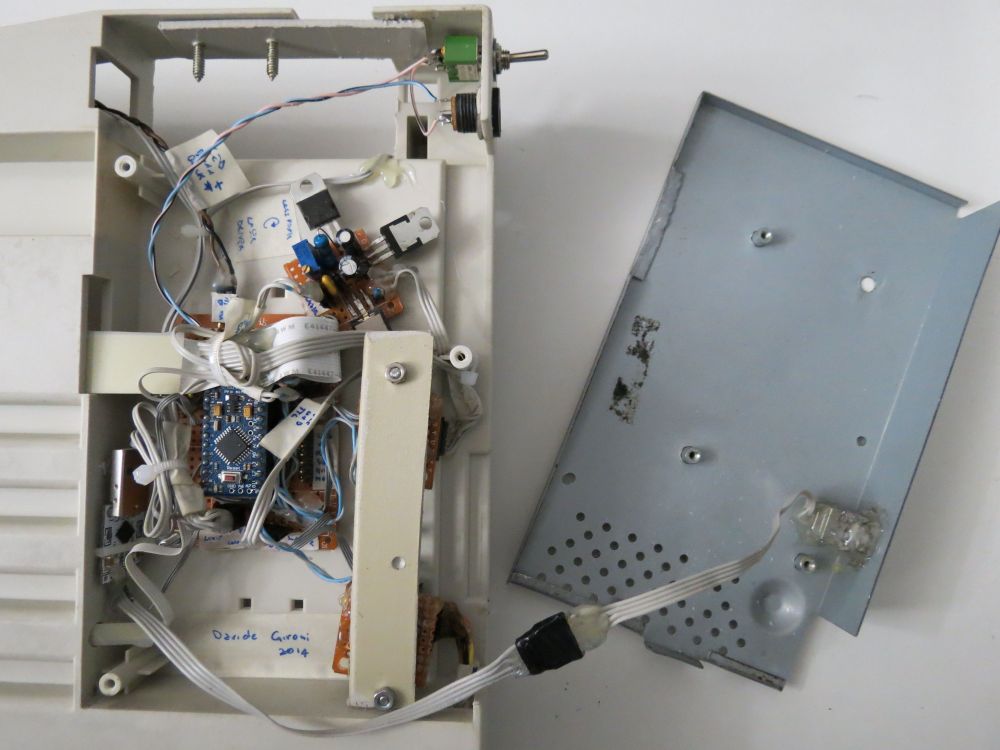
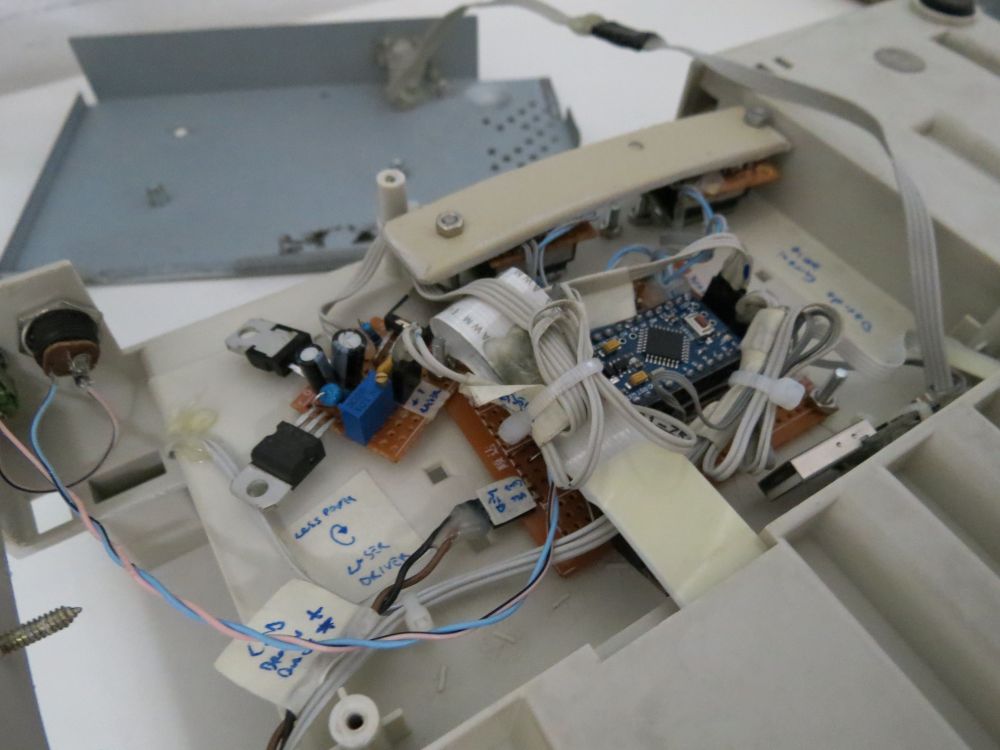
El cerebro de este proyecto es un ATmega328P corriendo a 16Mhz. cargado con firmware grbl http://github.com/grbl/grbl, que es un potente aún opensource g-código analizador.
Se ha utilizado una placa Arduino Mini, incluso si el software no utiliza el marco de Arduino.
Un regulador de tensión 7805 se utiliza como fuente de alimentación para el ATmega.
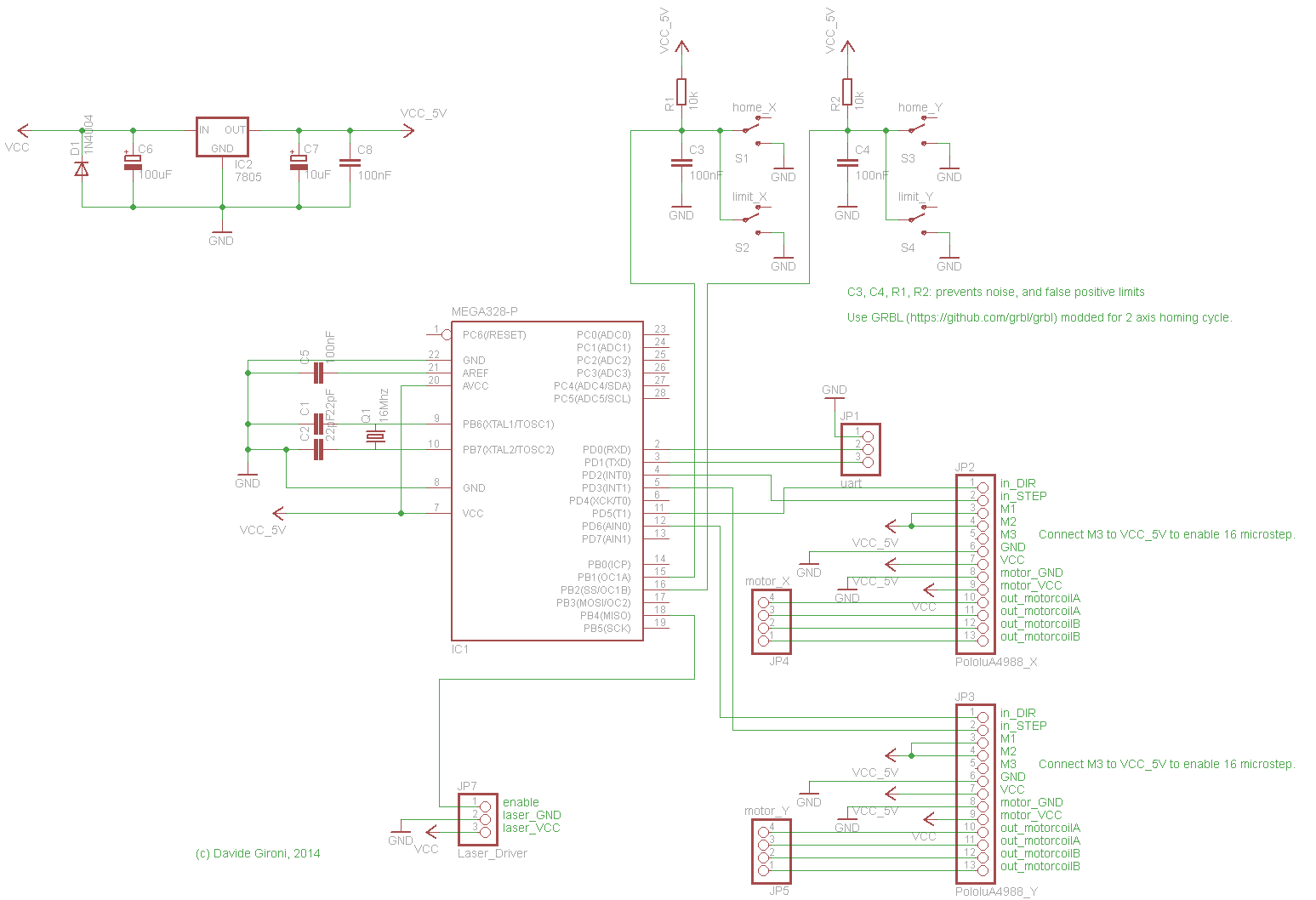
El firmware Grbl 0.9 sirve para construir enrutador 3 ejes, pero funciona en sistemas de 2 ejes de este tipo, con un límite duro y homing habilitado por medo de una versión personalizada del firmware que consiste en cambiar a versión 0,9 g en son archivados config.h. las siguintes líneas:
HOMING_CYCLE_0 #define (1 << Z_AXIS)
HOMING_CYCLE_1 #define ((1 << X_AXIS) | (1 << Y_AXIS))
fue comentado y ha cambiado a:
HOMING_CYCLE_0 #define ((1 << X_AXIS) | (1 << Y_AXIS))
// # define HOMING_CYCLE_0 (1 << Z_AXIS)
// # define HOMING_CYCLE_1 ((1 << X_AXIS) | (1 << Y_AXIS))
A continuación, el nuevo firmware grbl puede ser compilado y utilizado, evitando grbl problema 0.9 homing en 2 máquinas de eje.
La versión personalizada de compilador v0.9g grbl para ATmega328P @ 16Mhz, con una velocidad de transmisión de 115 200, se puede descargar a continuación aqui.
CP2102 se utiliza como USB a la placa de UART y sólo tiene que cargar el firmware usando su cargador favorito, la página wiki unidad grbl usted sobre la forma de hacer este paso.
En la wiki grbl también se puede encontrar cualquier otra información sobre comandos y configuración del software.
El controlador del motor ara mover el X e Y motor paso a paso son Carrier Conductor Polulu A4988 del motor de pasos, basado en Allegro A4988.
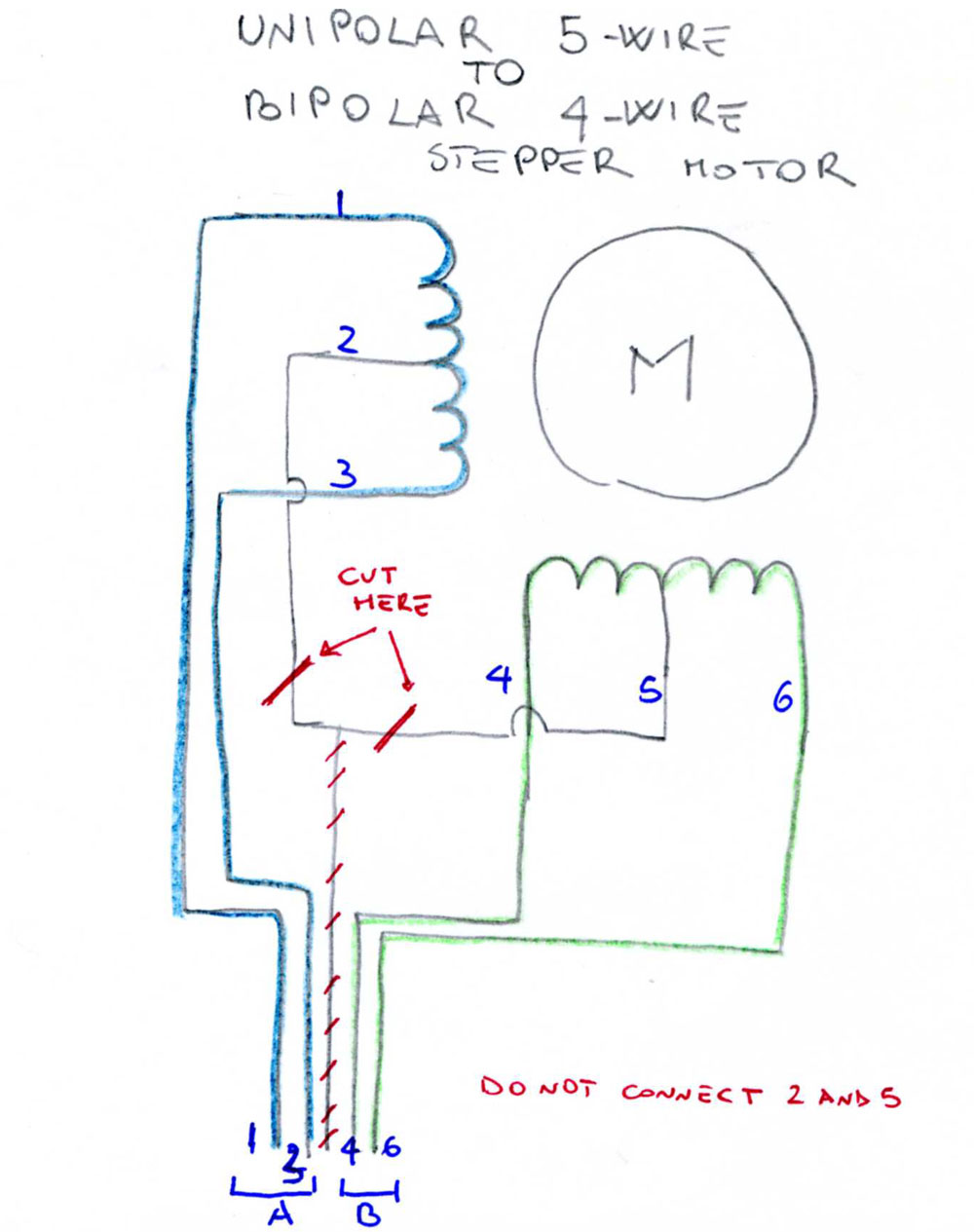
Como los escáner tpueden tener un motor paso a paso de 5 hilos unipolar. Ese conductor Allegro sólo funciona con motor paso a paso bipolar 4 hilos el autor transformóa el motor unipolar a un motor paso a paso bipolar.
Para realizado esta modificación, se corta el hilo común entre los dos devanados principales y luego se compruebaque las bobinas no tienen ninguna conexión con un multímetro. De esa forma se tienen dos bobinas, al igual que un motor bipolar:
Las impresoras por el contrario suelen tener motores paso a paso de hilos bipolares. Para controlarlo se usara una placa A4988 Allegro que envíara al motor la señales necesarias para energizar este. Incrementar los pasos hace que el motor sea más preciso, pero también reduce el par del motor ( de hecho se puden hacer algunas pruebas para determinar la configuración de su mejor potencia del motor).
Para los motores usados para permitir un movimiento del motor suave y fino, y un buen par usando un par de placas a A4988 Allegro , se configura para 8 micropasos para el motor-Y, y 16-microstep para el motor-X.
Abajo puede encontrar el cableado básico de conexión de placas Polulu.
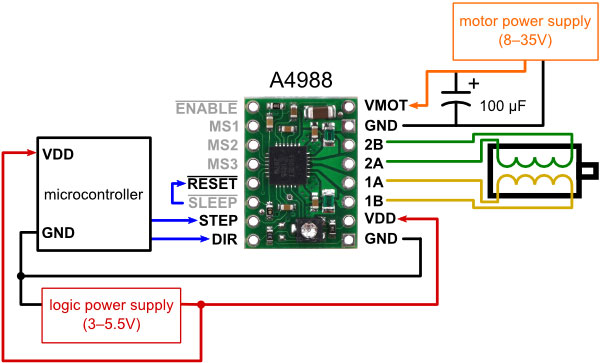
Para hacer el tablero Polulu funcionar a 8 micropasos M1 y M2 tiene que estar conectado a la alimentación lógica de alimentación VDD, si quiere ejecutarlo en 16 micropasos, conecte también M3 a VDD. El suministro Motors VMOD está conectado directamente a 12v.
En cada eje un límite y un microinterruptor de toe de fin de carrera se coloca para evitar el eje avanace al final y finalmente dañe el controlador de motor.
Debido a que el final de carrera son bastantes sensibles al ruido,se he añadido un condensador de 100nF de paso alto y una resistencia adicional 10k pull-up. Asimismo, el límite y el cable de casa son independiente y distante de la correa de cable del motor y el láser.

El láser utilizado es un diodo láser rojo, reciclado de la óptica grabadora de un DVD-ROM. En el CD-ROM y DVD-ROM también se puede encontrar controlador de infrarrojos, láser de la grabadora de DVD diodo será un poco más potente que el de un CD . Un diodo láser por lo general tiene tres contactos , uno o el cátodo del fotodiodo (-), otro el ánodo del diodo láser (+), el otro es el ánodo monitor de fotodiodo (+). Si el diodo que está utilizando no tiene ninguna marca, y no sabe el pinout del diodo, usted tiene que encontrar el cátodo y el ánodo del láser. Un método simple para encender el diodo con un 1,8 a la corriente 2.2V, sólo por una pequeña cantidad de tiempo, digamos 1s, si absorbe actual, el cableado es el pinout diodo láser.
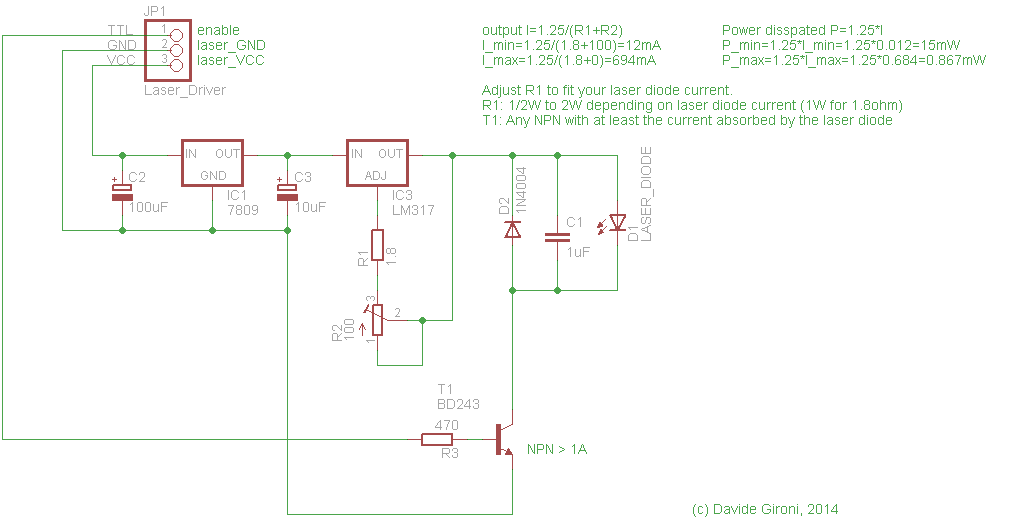
Por otro lado un diodo láser tiene que controlado con un controlador adecuado, usando controlador de láser basado LM317.Este controlador láser puede conducir diodo de 12 mW a 700mW. Un regulador de voltaje de 9V a prevenir sobretensión en el diodo láser. También un NPN se coloca para permitir la entrada de TTL que viene desde el microcontrolador para activar o desactivar el láser. Estamos utilizando LM317 IC como un regulador de corriente. El voltaje de entrada se interponga en el pin Vin del LM317, desde la salida Vout al pin ADJ hay una resistencia R conectada. La corriente de salida Iout está dada por la fórmula Iout = Vref / R. Allá resistencia no siempre tensión Vref. Cuando disminución actual, la tensión de más de R debe ser menor, pero de esa manera el regulador aumentar su voltaje de salida para ajustar su tensión Vref.
Vref es 1,25 para el LM317. R se realiza mediante un resistor fijo R1 y un condensador de ajuste R2. Esa resistencia y el condensador de ajuste establece la corriente de que el uso del láser.
Así actual controlador de láser está dada por la fórmula: I = 1,25 / (R1 + R3).
La potencia nominal de las resistencias R1 y R2 se calcula mediante la forumla P = 1,25 * I.
Antes de conectar el láser y probar el controlador, compruebe que la resistencia es el valor más alto posible, a continuación, conecte el láser y medir la corriente absorbida mediante un amperímetro. Tenga en cuenta que si establece demasiada corriente al láser, que harán volar.
A continuación el circuito de excitación láser.
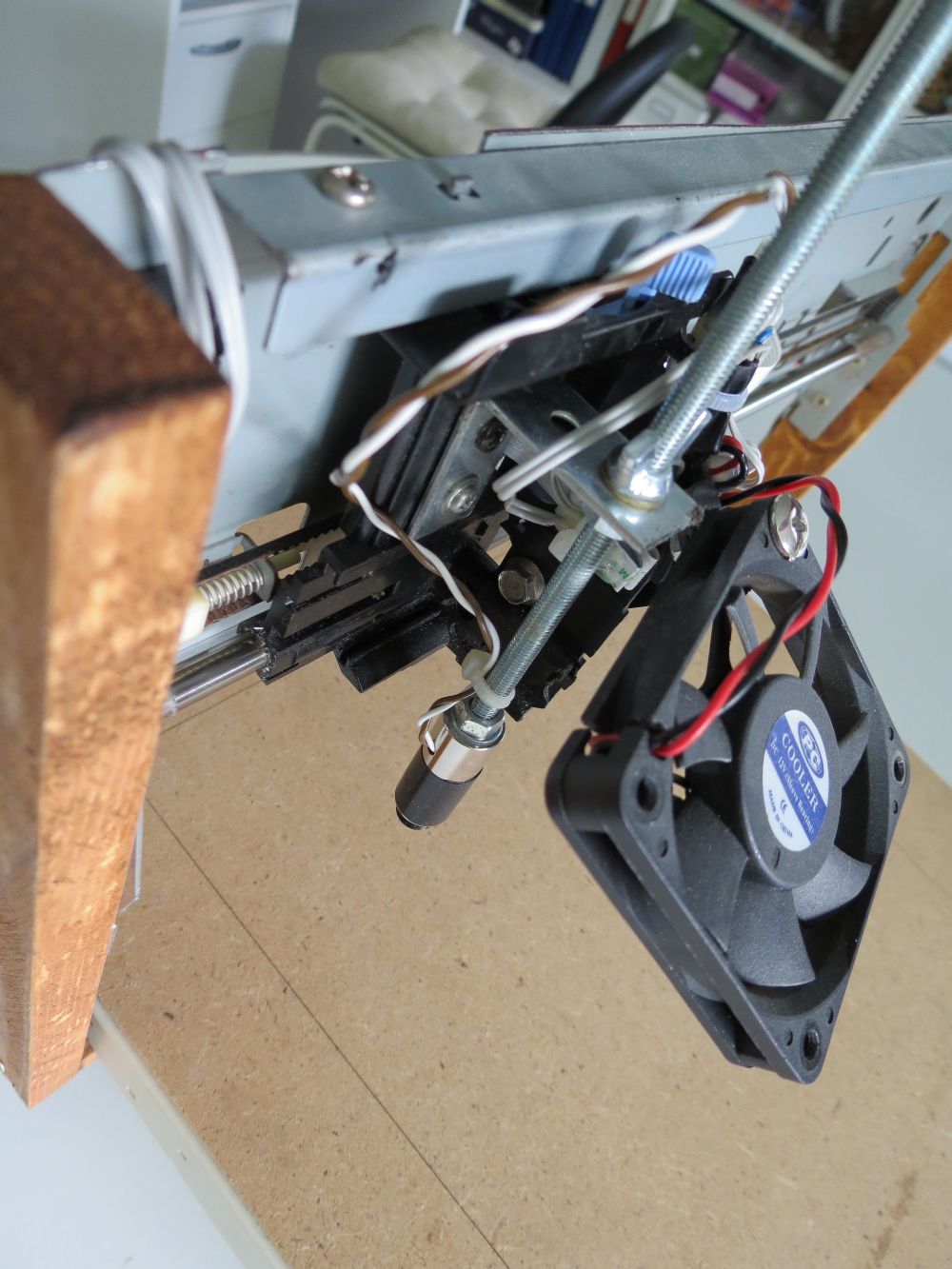
Un estándar de 60mm x 60mm ventilador sin escobillas PC está instalado para despejar el humo, esto evita que la lente óptica de láser que se nubló.
Los comandos para la máquina de grabado se envían a través de UART a 115.200 baudios.
Una vez que ha construido la máquina, toca comprobar y conectar todo, cargando el firmware grbl en el microcontrolador (puede utilizar el software de terminal, o un controlador grbl para configurar su placa de control).
Se puede suar G-Código Universal de remitente para configurar y enviar comandos para grbl, pero también se puede utilizar un terminal simple.
Lo primero que debe hacer es probar el movimiento del motor: Para probarlo, basta con enviar el X10 Y10 comando, o utilizar el botón de movimiento del remitente G-Code Universal.
Usted debe ver un movimiento del motor en cada eje. También puedes ver el láser se enciende y se apaga mediante M3 y M5 mando.
Ahora para configurar la distancia correcta del motor para funcionar, tiene que configurar cada motor paso a paso / mm.
El método de calibración paso / mm Motor eje es bastante simple.
Vamos a tratar de la calibración del eje X como ejemplo. Sabemos cuántos paso / mm o grbl steps_per_revolution es en realidad la instalación, grbl $100 = 250.000 (x, paso / mm) parámetro.
Ahora, cambiamos su motor para algunas medidas, digamos 100 micropasos, el eje debe tener movimiento 100mm. Ahora medimos la distancia real de que el motor se ha movido, vamos a suponer que es 181mm. El nuevo valor del paso / mm para este eje del motor debe ser steps_per_mm = (steps_per_revolution * micropasos) / mm_per_rev ,asi que b 138.121 = (250 * 100) / 181
$ 100 = 138.121
Ahora, si mueve el motor de 100 mm, se debe mover 100 mm.
Porque se he instalado el límite y el interruptor de casa, los límites duros $ 21 = 1
Se fija el homing pull-off a 5 mm, porque el microswotch puede tiner una larga palanca, y se quiera que el motor se mueva la distancia después del ciclo de casa. $ 27 = 5.000
También el ciclo homing se habilitó: $ 22 = 1
Y la dirección homing de máscara se cambia también. Uno puede incluso necesitar invertir eje de dirección, «puerto dir máscara invertido» es el parámetro que tiene que tocar.
Esas son la configuración grbl más común, para la lista completa, mire la página wiki grbl.
A continuación puede encontrar los parámetros de configuración grbl qeu el autor cambió:
$ 21 = 1 (límites duros, bool)
$ 22 = 1 (ciclo de homing, bool)
$ 27 = 5.000 (homing pull-off, mm)
$ 23 = 3 (homing máscara invertido dir: 00000011)
$ 100 = 37.879 (x, paso / mm)
$ 101 = 94.246 (y, paso / mm)
$ 110 = 100.000 (tasa máx x, mm / min)
$ 111 = 100.000 (tasa max y, mm / min)
$ 130 = 212.500 (x max viajes, mm)
$ 131 = 274.400 (viaje max y, mm)
Ahora usted podría ser capaz de enviar el dibujo g-código a su grabador.
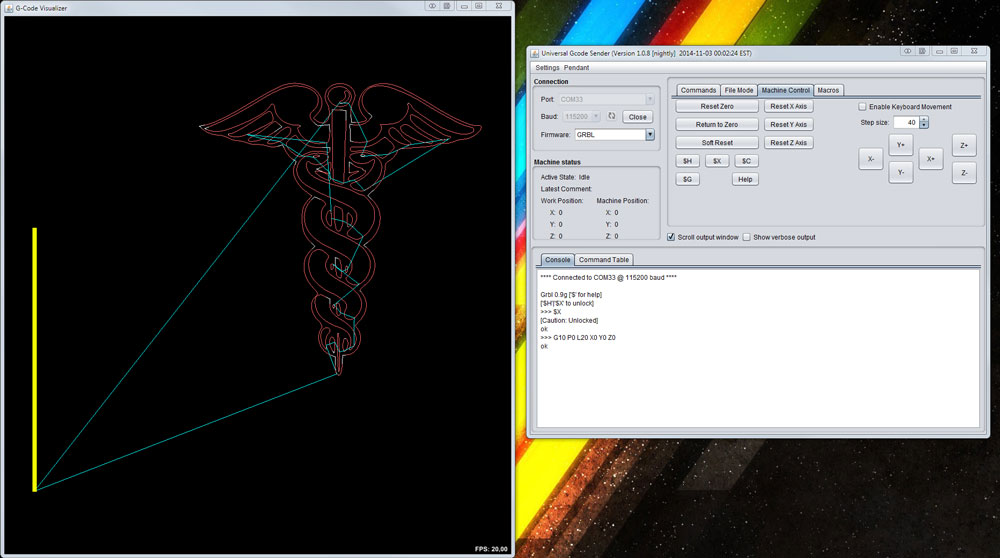
Hay una gran cantidad de software que puede utilizar para construir g-código empate, el que yo uso la InkScape. El trabajo es para este plotter es 212mm x 274mm, para configurar el área del proyecto de esta dimensión. Una vez que usted tiene camino, entonces usted puede seleccionar la ruta que desea grabar, y transformarla mediante el InkScape extensión grabador láser.
Sólo tiene que copiar la extensión en su carpeta inkscape extensión, reiniciar inkscape, y usarlo para construir su archivo de g-código.
Una vez que tenga el archivo de código G, puede enviarlo a grbl utilizando Universal-G-Code-Sender, u otro software grbl como Controlador Grbl.
Fuente aqui


Debe estar conectado para enviar un comentario.