Aunque suene muy novedoso Secret Labs (los creadores de Netduino)y House of Horology tuvieron ya hace tres años allá por 2013 tuvieron una la idea de crear el primer reloj inteligente abierto :Agent , un smatwatch muy similar a lo que proponen hoy en día ,pero claramente con recursos innovadores para su época como era la carga inalámbrica y la pantalla de tinta electrónica.
El reloj cuenta con procesador a 120MHz ARM Cortex-M4 con secundario AVR co-processor siendo la pantalla de 1.28 «(128 x 128)con retroiluminación inteligente
lente de cristal anti-reflejo
Lleva integrado Bluetooth 4.0 BD / EDR + LE, un acelerómetro de 3 ejes ,Sensor de luz ambiental, motor de vibración y carga inalámbrica Qi
respecto a la batería es muy interesante pues se ha diseñado el reloj para permitir la reparación y reciclaje de este incluyendo la batería reemplazable , teniendo una autonomía de 7 días duración de la batería (típica) y 30 días en modo de sólo su esfera
Entre sus muchas virtudes este reloj puede ejecutar aplicaciones escritas en C # utilizando Microsoft Visual Studio 2012 ( incluyendo la edición gratuita Express) desplegando sus propias aplicaciones a través de Bluetooth y por supuesto depurando de forma interactiva .
Para crear apps para este reloj solo se necesitan tres herramientas gratuitas:
- Visual Studio Express 2012
- .NET Micro Framework SDK v4.3 QFE1
- Agente de descarga del SDK v0.3.0 (febrero de 2014 de vista previa)
Asimismo los desarrolladores también pueden utilizar el reloj como una pantalla secundaria , interactuando con él de forma remota a través de Bluetooth de su Objective-C , C #, Java o aplicación de teléfono inteligente .
Y por cierto al igual que su teléfono inteligente, este reloj ejecuta aplicaciones descargables .Estas aplicaciones pueden hablar con los dispositivos Bluetooth tradicionales, tales como teléfonos inteligentes y monitores de ritmo cardíaco , así como la nueva generación de dispositivos Bluetooth de baja energía, tales como cerraduras de las puertas .Por supuesto la conexión con el smartphone ,permite a las aplicaciones también recuperar la información desde Internet, que le puede mantener al día con las cosas que son más importantes para usted .

El proyecto se lanzó kickstarter y se llama Agent .La friolera de casi 6000 personas (exactamente 5.685 patrocinadores) contribuyeron con 1.012.742 $ para ayudar a dar vida a este proyecto, que aun no ha concluido por los números escollos que ha tenido en el aspecto hardware preveyendo que muy pronto de la luz.
En la otra cara de la moneda , tenemos otra propuesta muy diferente llamada
Culbox es una pulsera de código abierto con la que puede interactuar con los proyectos realizados con Arduino. Se puede programar a través del IDE de Arduino, siendo muy sencillo usar las diferentes librerías de Arduino con él..
Se trata de un reloj de pulsera de código abierto con Bluetooth integrado contando ademas con diferentes sensores como son un sensor de movimiento de 6 ejes , sensor de presión de aire ,altimetro,etc.
Cuenta con un procesador de 32 bits ARM Cortex ,, una pantalla de 1.5″OLED, 3 botones, y todo lo necesario en un reloj.
CulBox viene con una aplicación tanto para teléfonos Android como para IOS que se puede utilizar como una plantilla para realizar distintos proyectos.
Acepta tarjetas microSD. También hay un puerto de usos múltiples como la carga de la batería o conectar el dispositivo a Arduino para la programación. Enlace al proyecto en Kickstarter. Y a su web.
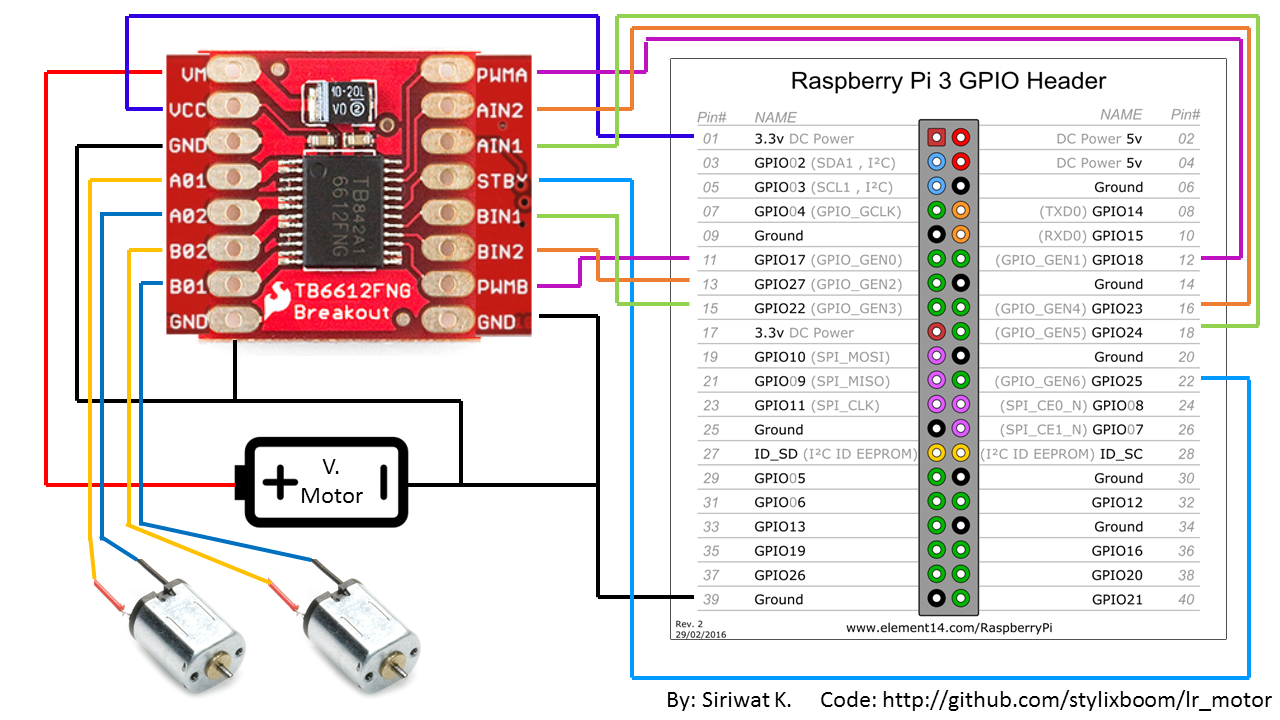 Una vez montado el circuito y ya vez tenga el código descargado (https://github.com/stylixboom/lr_motor) ,simplemente para ejecutarlo use : $ sudo node app_t.js
Una vez montado el circuito y ya vez tenga el código descargado (https://github.com/stylixboom/lr_motor) ,simplemente para ejecutarlo use : $ sudo node app_t.js
Debe estar conectado para enviar un comentario.