En los últimos dos años, millones de desarrolladores de casi todas las industrias del mundo han construido más de 1,2 millones de aplicaciones móviles con Ionic.
Cuando se inicio Ionic en 2013, sus creadores sólo querían hacer una mejor manera para que los desarrolladores web utilizasen sus habilidades existentes para crear aplicaciones para las tiendas de aplicaciones.
Hoy en día, Ionic es la tecnología de desarrollo móvil multiplataforma más popular del mundo, impulsando el rápido crecimiento de muchas startups .
Pero sus creadores no están satisfechos con Ionic buscando habilitar no sólo a la actual generación de desarrolladores móviles, sino también a los millones que se están dando cuenta de que también pueden construir para estos increíbles dispositivos.
Con Ionic 2, han mejorado considerablemente el rendimiento, reduciendo la complejidad del código que se necesita escribir haciendo hecho posible la creación de aplicaciones completamente personalizadas que compiten con las mejores aplicaciones del mundo.
Ionic 2 va a cambiar lo que piensa acerca de las aplicaciones móviles y el futuro de la web para siempre.
Por extraño que pueda parecer es posible usar Ionic 2 con Visual Studio con el plugin de Córdova.
Los pasos para instalar Ionic 2 con Visual Studio son los siguientes:
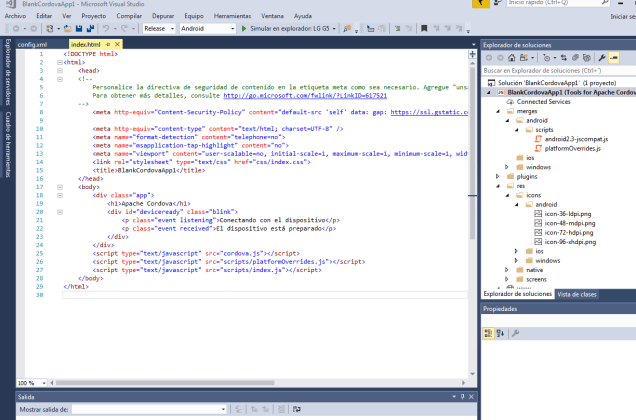
Si aún no lo ha hecho, instale Visual Studio 2017. Bajo las portadas, las aplicaciones de Ionic son aplicaciones de Apache Cordova, necesitará un entorno de desarrollo de Cordova funcional antes de poder usarlo con Ionic por lo que en primer lugar compruebe que puede crear y ejecutar la aplicación predeterminada Cordova Blank.
En Visual Studio, abra el menú Archivo, seleccione Nuevo y, a continuación, Proyecto. En el cuadro de diálogo del nuevo proyecto, expanda la sección de plantillas de JavaScript, seleccione Aplicaciones de Apache Cordova y, a continuación, elija la plantilla de aplicación en blanco (Apache Cordova).
Entregue al nuevo proyecto un nombre y una ubicación y luego haga clic en el botón Aceptar.
Presione F5 para generar y ejecutar el nuevo proyecto en el emulador de ondulación. El navegador Chrome debe abrir y mostrar el contenido de la aplicación.
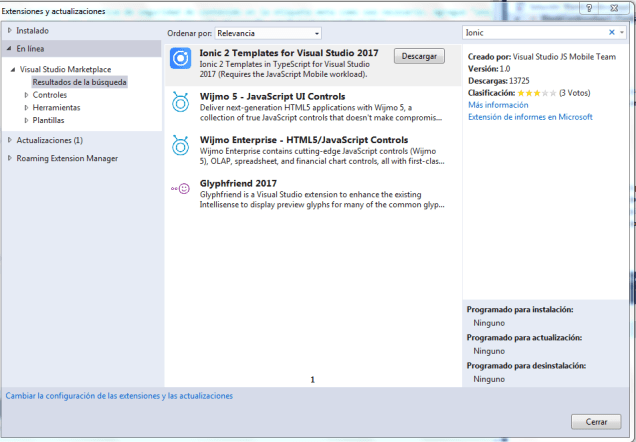
Instale la plantilla de Ionic en Visual Studio seleccionando el menú Herramientas, luego Extensiones y actualizaciones
En el cuadro de diálogo Extensiones y actualizaciones, seleccione Online.
En el cuadro de búsqueda situado en la esquina superior derecha del cuadro de diálogo, escriba Ionic 2.
Seleccione la opción Ionic 2 RC Templates en la lista. Haga clic en el botón Descargar para iniciar la instalación.
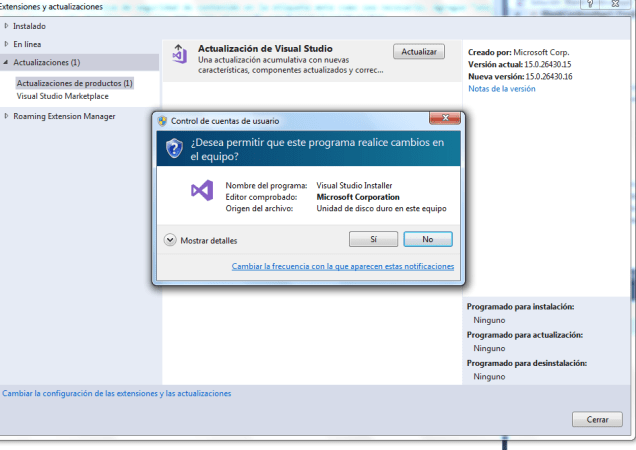
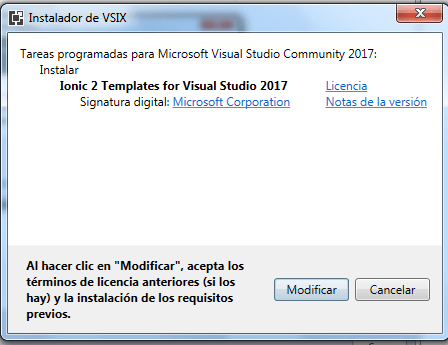
Ahora llega el momento de actualizar para que cargue la plantilla de Ionic 2, para lo que nos iremos a Actualizaciones de Productos
Pulsaremos «Modificar» para proceder a instalar las plantillas de Ionic 2
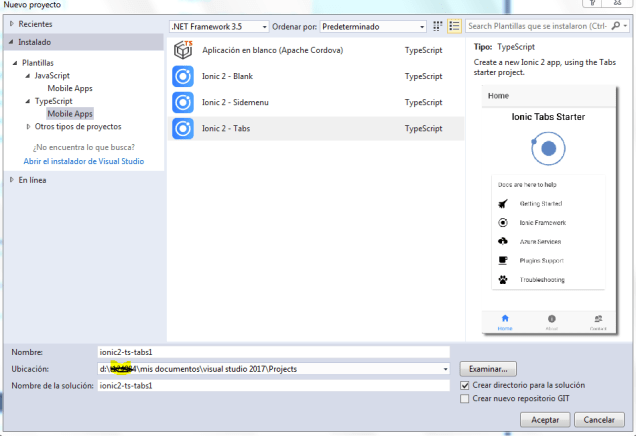
Una vez finalizado el proceso podemos comprobar en Nuevo proyecto–>Instalado–>TypeScript que tenemos acceso a las plantilla de Ionic 2
Puede parecer una banalidad , pero la idea detrás de este prototipo es muy interesante ya que puede suponer una ayuda importante a la movilidad, pues esta assietncia puede ser especialmente importante para los ancianos y otras personas que necesitan este tipo de ayuda en la vida cotidiana.
El sistema que sugieren sus creadores destaca por su simplicidad : una estructura de aluminio para sujetar el brazo, un motor y una placa Arduino con su correspondiente escudo (cuyos detalles, por cierto, han publicado en hackaday.com) ,
Nos explican que en la construcción del exo-brazo buscaban que fuese relativamente barato, sencillo y potente que permitiera un uso fácil del mismo , por lo cual construir su prototipo no deberia costar mas de 100$ , lo cual es un precio bastante razonable ,sobre todo si nos vamos a soluciones que se estan desarrollando la industria.
El desarrollo de este proyecto comenzó centrándose más en el control del brazo y luego en el propio diseño, por lo que tal vez el objetivo número de sus creadores es hacer que el control de ExoArm sea tan barato y tan intuitivo como sea posible.
En el siguiente video podemos verlo en acción:
Como podemos apreciar, hay una estructura articulada de aluminio y precisamente en la articulación esta el motor (en el codo) , aunque sugieren que en otros diseños futuros también proveen implementar un actuador en el hombro( de hecho el shield empleado admite dos motores).
Este exo-brazo tiene tambien apoyo trasero, de modo que todo el peso se distribuye uniformemente a su cuerpo siendo la capacidad de elevación alrededor de 10 kg máximo o 22 libras.
Electrónica
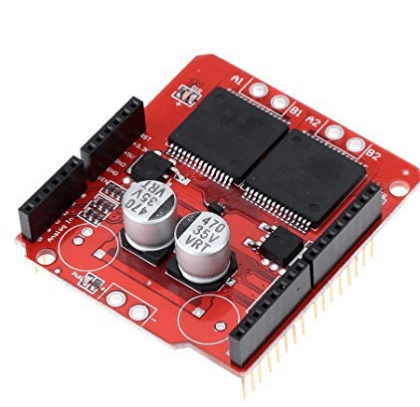
Ademas de la placa Arduino, un componente básico es el driver del motor VNH2SP30 ,el cual es esencialmente una versión en rampa del escudo de motor Ardumoto. Esta placa se presenta como un escudo que se conecta encima de Arduino y es de bajo coste ( unos 6,5€ en Amazon).
Para este Shield se usa un par de drivers de motor de puente completo VNH2SP30. También incluye los circuitos de soporte para que esta placa sea capaz de controlar un par de motores de alta corriente , aunque para esta aplicacion solo se usa uno .
El VIN y el motor son lanzados para terminales de tornillo de 5mm , lo que facilita la conexión de cables de mayor calibre.
Al utilizar este escudo en aplicaciones de alta demanda extrema puede ser necesario mejorar el rendimiento térmico con un disipador de calor o ventilador y soldar los cables directamente a la placa en lugar de usar un terminal de tornillo (tenga en cuenta la alta corriente de este) , aunque cuando se utiliza el escudo en corrientes de hasta 6A los chips apenas llegarán a ser perceptiblemente calientes.
Resumidamente esta son algunas de las características del escudo empleado:
Voltaje: max. 16V
Regimen de corriente: 30A maximo
Corriente permanente: 14 A
Resistencia MOSFET (solo ida): 19 m & OHgr;
Frecuencia PWM: 20 kHz Max.
Tamano placa: 6 * 5,2 * 2cm / 2,4 * 2 * 0,8pulg
Peso : 23 g / 0,8 oz
Una vez resuelto el driver, respecto a Arduino , los pines que se requieren , en la aplicación son los pines siguientes:
Pines 3 y 4 como salidas binarias para configurar el motor vía el driver del motor VNH2SP30
Pin 5 como salida analógica para escribir el dato en el el driver del motor VNH2SP30
Pin 2 como entrada analógica para el encoder solidario al eje del motor para saber la posición de la articulación
Pines 8 como entrada binaria para ordenar subir la articulación via el motor
Pines 9 como entrada binaria para ordenar bajar la articulación vía el motor
Antes de ver el codigo final , es interesante apreciar como el control del motor se hace fijando los pins 3 y 4 a un valor y luego sacando un valor analogico en el pin 5, por ejemplo, parar mover arriba el motor se usa esta función:
Simplemente para parar el moto,r sacamos un valor cero en el pin 5 usan esta otra función:
void stopmove(){ //parar el motor
digitalWrite(3, LOW);
digitalWrite(4, LOW);
analogWrite(5, 0);
}
Una función muy importante es conocer la posición de la articulación gracias a que hay conectado un potenciómetro solidario al aje de modo que capturando el valor de la salida del potenciómetro podemos conocer el angulo ,gracias al siguiente código:
Por ultimo, en la función loop miramos continuamente los valores binarios de los pines 8 y 9 ,y en función de su estado, llamaremos a alguna de las rutinas anteriores:
void loop() //bucle principal de ejecución { int program_runtime = millis();
int readingUp = digitalRead(8); int readingDown = digitalRead(9);
El procesamiento de control como decíamos se hace con un Arduino, por lo que el código es bastante fácil de entender y modificar cuanto se quiera para mejorarlo o adaptarlo a cada necesidad:
float computePID(int setpoint){ //función de calculo de la posición del encoder
angle = analogRead(2);
angle = map(angle, 0, 344, 0, 90); // dejanski kot Serial.print(angle);
1 × calibrador de tensión con el amplificador de celda de carga
1 × Aluminio 4 x 30 x al menos 2000 mm
1 × Arduino Uno / Nano
1 × controlador de motor VNH2SP30
1 × Motor del limpiador del parabrisas del coche
1 × cables largos
1 × Potenciómetro
1 × Li-Po batería 3S 5500mAh
1 × Tornillos y tuercas. M4 y M6
1 × Cinta adhesiva
1 × Zipties
1 × Correas
1 × Placas de madera
1 × Tubo termorretráctil
En el siguiente vídeo el autor describe mas detalles de construcción de este excelente exo-brazo:
Mas información en https://hackaday.io/project/20663-assistive-exoskeleton-arm-exoarm#menu-description

Debe estar conectado para enviar un comentario.