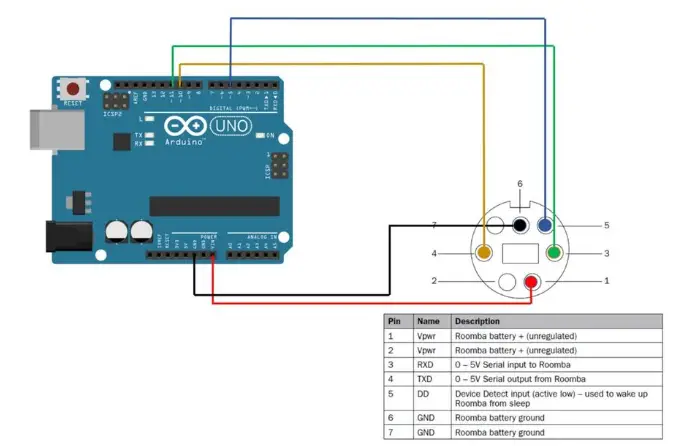
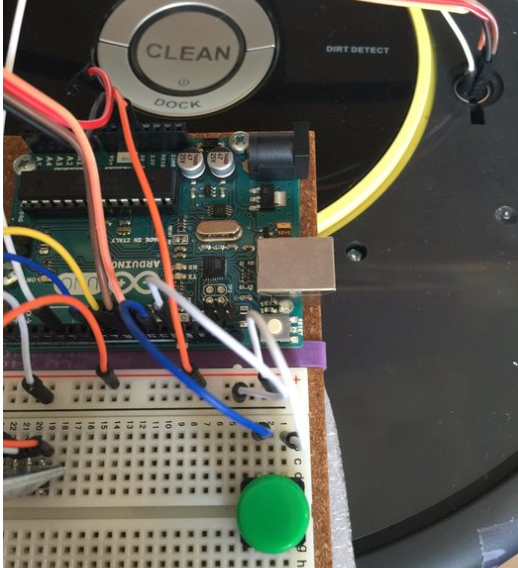
En el post de hoy vamos a ver como es posible enviar datos usando la Raspberry Pi , pero esta vez no desde la distribución de Raspbian sino con una propia imagen de windows 10 especifica para Iot que Mircrosoft ha preparado precisamente para esta plataforma
Ahora vamos a preparar la instalación de tarjetas SD para el sistema operativo Windows IO. Se recomienda altamente la tarjeta SanDisk Extreme micro SD de 16 GB HC o mayor Nos intentado este paso en particular con cinco tarjetas diferentes de diferentes marcas y cronometré pues los resultados fueron malos. Algunas otras tarjetas de SanDisk (incluso uno normal) tomaron varias horas que van de 3 a 9 horas para el sistema operativo fuese instalado y actualizado pero esta toma alrededor de 35 minutos. !
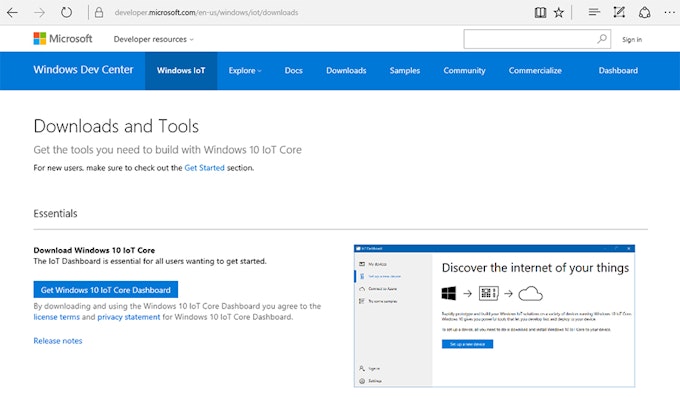
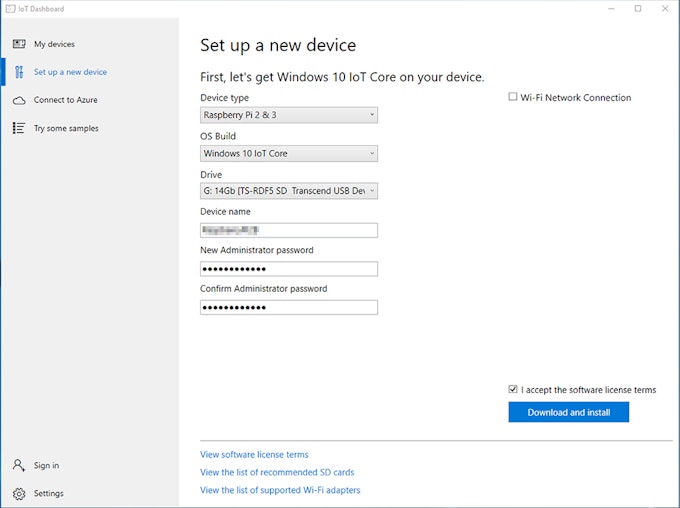
Microsoft ha hecho que sea muy fácil de instalar su nuevo sistema operativo básico de Windows IO en una tarjeta SD. Sólo tiene que descargar su nuevo Panel de control de Windows Core IO de https://developer.microsoft.com/en-us/windows/iot/downloads e instalarlo en su PC principal.
Una vez instalado correctamente, vaya a la ‘Configurar un nuevo dispositivo picando en el enlace en el panel izquierdo. Aquí da a su dispositivo un nombre. Este nombre se utiliza para identificar el dispositivo en la red.
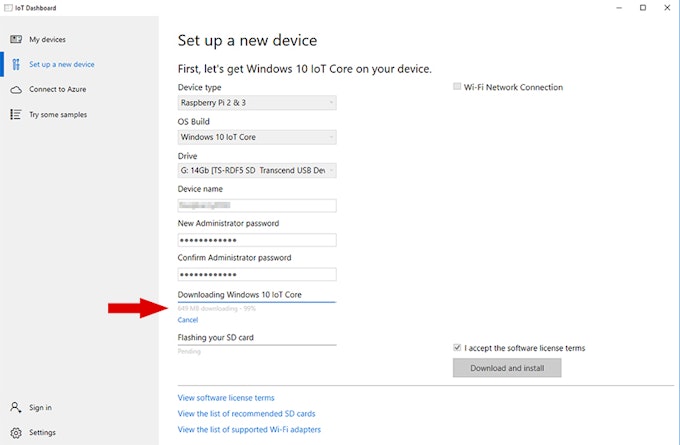
Cuando se pulsa el botón «Descargar e instalar», verá una barra de progreso para el sistema operativo está descargando. En nuestro caso fue 649MB al 99%, como se muestra a continuación.
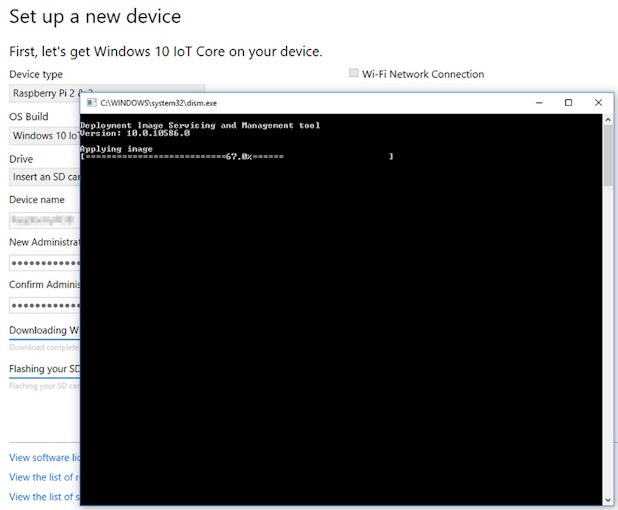
Después de finalizar la descarga, el proceso comienza a parpadear. Aquí es donde se puede probar el rendimiento de su tarjeta SD, ya que este proceso es de escritura pura. En el caso de la tarjeta comentada literalmente tomó 25 segundos.
Si de alguna manera su instalación no funciona o se bloquea, puede que tenga que volver a la imagen o volver a instalar el sistema operativo. En esos escenarios no se olvide de formatear la tarjeta SD.
Una vez más como hemos hablado muchas veces en este blog , se recomienda SDFormatter V4.0, con la configuración se muestra a continuación:

Después de que la tarjeta SD se haya formateado, repita el proceso de instalación del sistema operativo de Windows utilizando la IO núcleo del tablero de instrumentos.
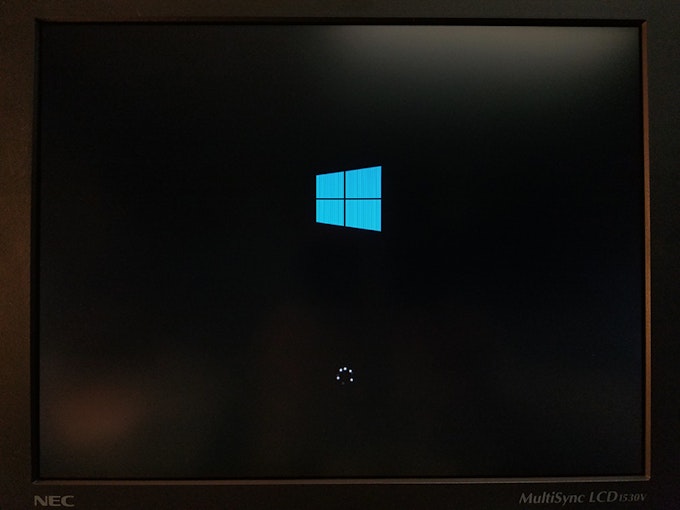
Para el primer arranque recomendamos tener un monitor HDMI, teclado y ratón, y una conexión ethernet. Aunque puede ejecutar totalmente una Raspberry Pi con Windows IO completamente sin monitor, con un monitor y conectividad Ethernet acelera el proceso de instalación.
La primera cosa que usted notará en el monitor HDMI es el logotipo de Windows sesgadas de metro con una bola / anillo de carga, que de una manera extraña ofrece gratifaction. Imagínese un escenario en el que tenías que mirar a ese logo estática, sin retroalimentación.
Después de esa pantalla, recibirá un mensaje de bienvenida del equipo de Windows IO, lo que nos gusta mucho. ¡Gracias chicos!
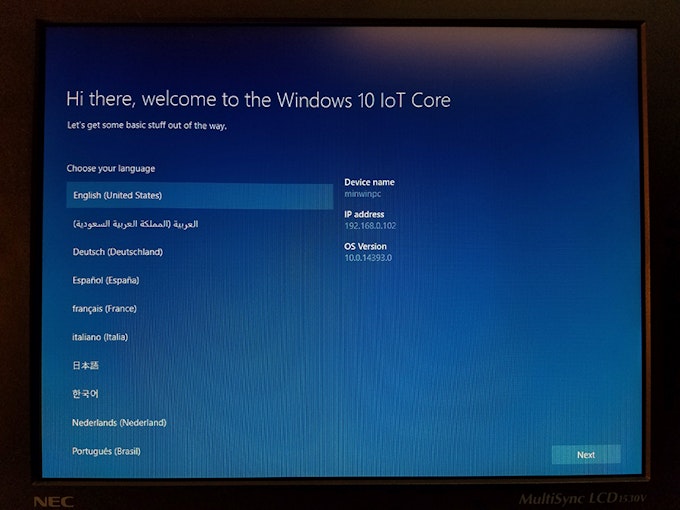
Al cabo de unos segundos se le llevará a la página de selección de idioma. Se dará cuenta de que algo extraño aquí. El nombre del dispositivo que se muestra en el panel de la derecha es «MINWINPC«. «Oh vaya, ¿qué pasó con el nombre que le puse al dispositivo a través del panel de control, mientras que la formación de imágenes», se podría pensar.
No se preocupe, sea paciente y espere a esta ventana por un tiempo (unos 11 segundos). De repente, el Raspberry Pi se reiniciará de nuevo sin ninguna advertencia. En este punto, lo mejor es dejar que su pi haga su cosa. IO de Windows Core está en desarrollo activo, por lo que sabe en el momento de probar esto sólo podría comenzar con el nombre proporcionado en el tablero de instrumentos.
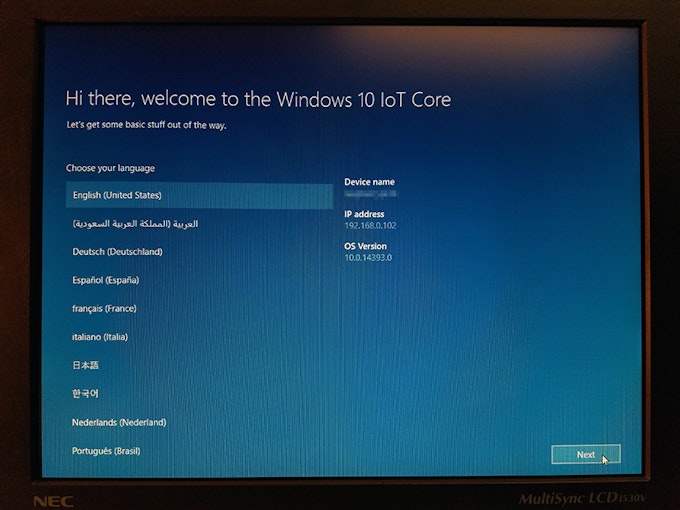
Esta vez las ventanas arrancado con el nombre de dispositivo configurado correctamente. Ahora sólo tiene que seleccionar el idioma y haga clic en «Siguiente«.
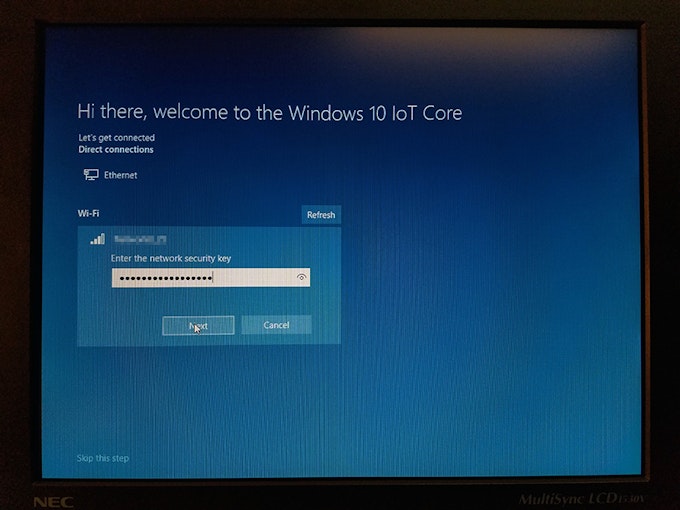
En la siguiente pantalla se le pedirá que introduzca las credenciales de seguridad Wi-Fi. Si por alguna razón usted no puede establecer la contraseña de WiFi ahora, usted será capaz de restablecerla a través del Portal de dispositivo más tarde.
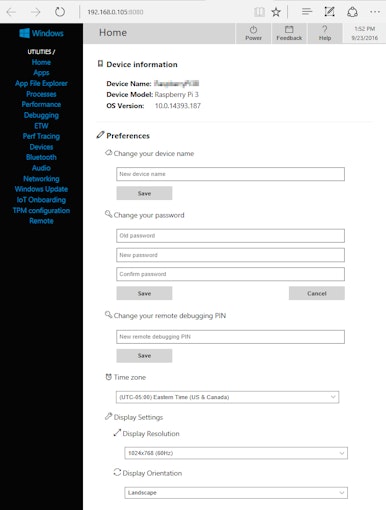
Después de configurar el WiFi / Red se le llevará a la página principal del dispositivo.

Hay dos cosas muy importantes a tomar nota de en esta página: El nombre del dispositivo y la dirección IP. Esta dirección IP es lo que vamos a usar más tarde para conectar con el dispositivo, ya sea a través del portal del dispositivo, a través del acceso de cliente remoto, o a través del cliente Power Shell.
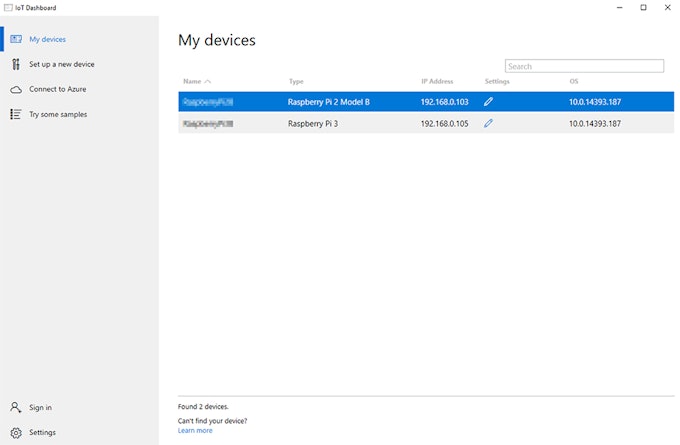
Ahora mueva su atención a su PC principal y ponga en marcha el Panel de control de Windows Core IO. Si ha instalado dos raspberrys en la misma red que tiene su PC principal, verá los dispositivos que aparecen en su página Mis dispositivos. (Puede dirigirse a esta página haciendo clic en «Mis dispositivos» en el panel de la izquierda).
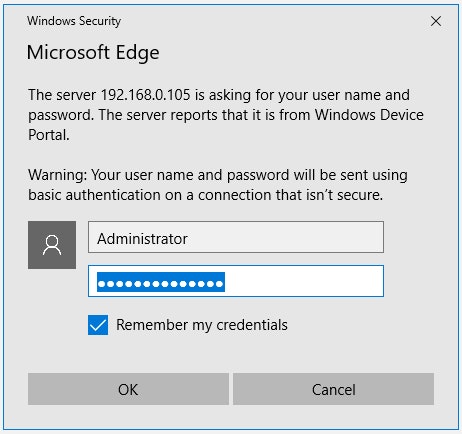
Haga clic en uno de los dispositivos y seleccione «Abrir» en el Portal de dispositivos. Esto abrirá la ventana de su navegador favorito con alerta de seguridad de Windows. Entre ‘administrador’ como nombre de usuario y la contraseña que utiliza para configurar el dispositivo en el panel del dispositivo anterior.
Una vez que introduzca sus credenciales, podrá acceder a su portal de dispositivos. Desde aquí se puede cambiar todos los ajustes para su dispositivo.Esta característica es muy util asi que felicitamos al equipo de Microsoft que la IO.
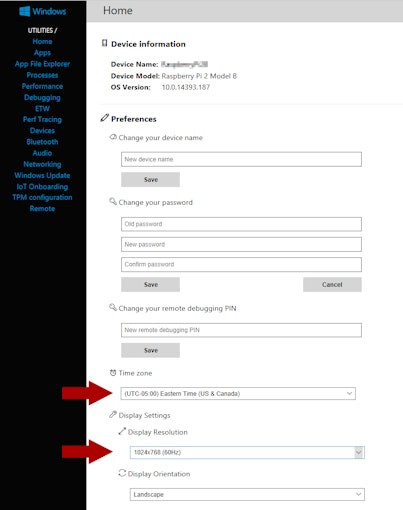
Ahora vamos a cambiar en primer lugar la configuración de zona horaria a la zona horaria actual. Después de eso, cambiar la resolución del dispositivo de su elección. Esto podría provocar un reinicio.
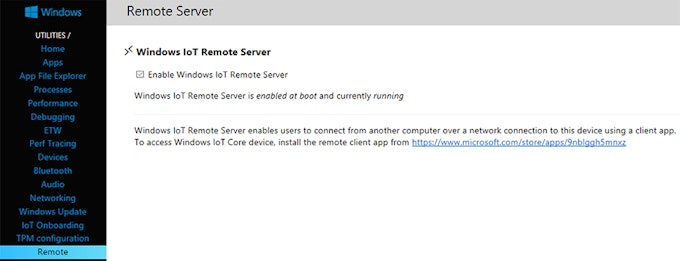
Ahora, que el servidor remoto de Windows IO. Esta función será muy útil más adelante, prometemos!
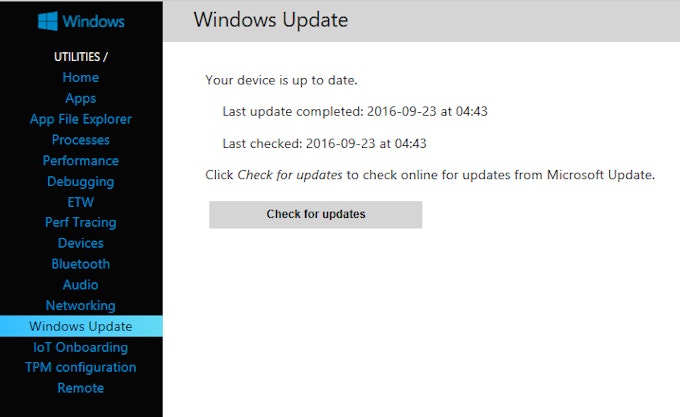
Ya casi ha terminado de definir nuestra IO Principal OS de Windows. En este punto debey dejar que la actualización de su dispositivo haciendo clic en «Buscar actualizaciones».
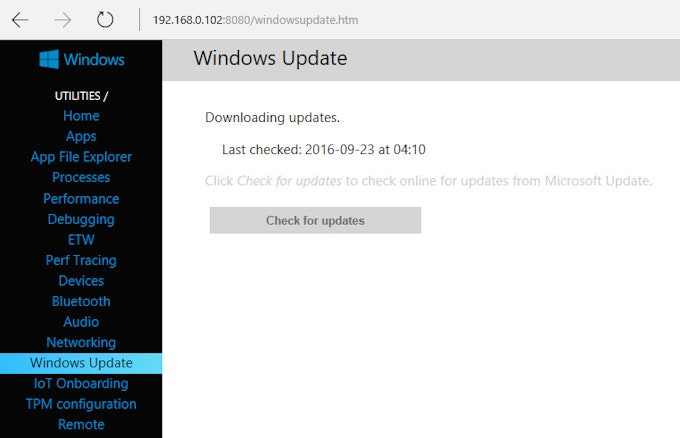
Una vez que las actualizaciones se instalan correctamente, el dispositivo le pedirá que reinicie.
Haga clic en «Restart» ahora, y ser paciente.
Ahora los cambios se están reconfigurando y en realidad están instalando, lo que puede tardar desde 15 minutos hasta varias horas. Esto es cuando realmente va a ser agradecidos si actualizó su tarjeta SD para SanDisk Extreme.
Después de todas las actualizaciones se instalan correctamente su dispositivo Portal milagrosamente primavera de nuevo a la vida y mostrar este mensaje inmensamente satisfactorio.
No se olvide de actualizar todos sus dispositivos. En este punto, le recomendamos que cierre todos sus dispositivos y desenchufe sus HDMI, teclados y monitores. Usted no va a necesitar ellos por un tiempo.También recomendamos conseguir un par de paquetes de batería USB y va móvil.
¡Eso es! Hemos ya completado la mitad del viaje.
Ahora vamos a pasar nuestra atención en el Portal de Azure y Visual Studio lado de las cosas. En primer lugar, abrir portal.azure.com y navegar en el cubo de la IO en el panel de la izquierda.
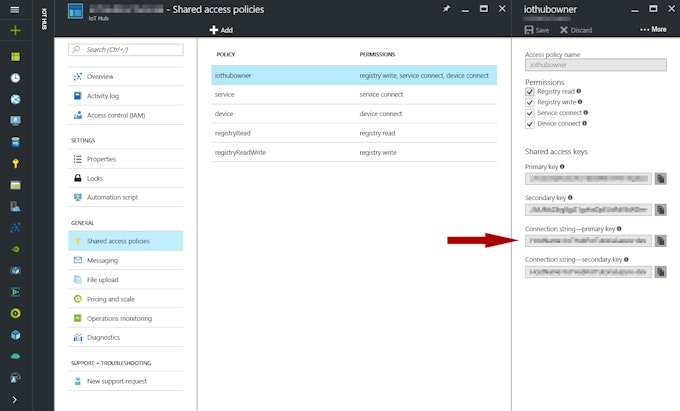
Aquí es donde lo dejamos el Portal de Azure En este punto, tendrá que hacer clic en «políticas de acceso compartidos ‘. En la lista de políticas, seleccione ‘iothubowner‘ y copiar la clave de cadena de conexión a la primaria, como se muestra en la imagen siguiente.
Ahora está listo para empezar a programar. ¡Sí! Si usted no tiene ya instalado Visual Studio, vaya a http://www.visualstudio.com para descargarlo e instalarlo.
Recomendamos Visual Studio Comunidad para empezar. Es gratuito para uso no comercial, por lo que hacen uso de este servicio gratuito hasta que comienze a vender sus productos / servicios.
Así pues, ahora usted tiene una copia nueva de instalado en el equipo de Visual Studio. O es posible que tenga que ya está instalado. De cualquier manera, es el momento de poner en marcha y crear un nuevo proyecto. Para esta aplicación particular, vamos a crear una aplicación de consola.
Crear una aplicación de consola en blanco y guardarlo en su lugar preferido.
En este punto, la ventana de código debería tener este aspecto:
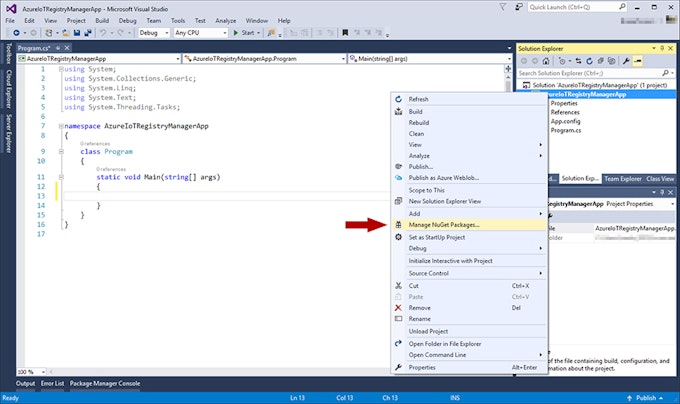
Haga clic derecho sobre el archivo de proyecto en el Explorador de soluciones en el panel derecho y seleccione ‘Administrar paquetes NuGet’ desde el menú desplegable.
En la ventana del administrador NuGet paquete, vaya a explora y buscaMicrosoft.Azure.Devices. Haga clic en «instalar».
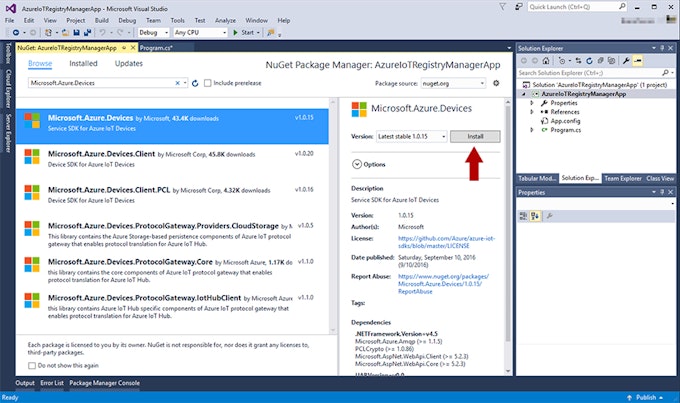
NuGet gestor de paquetes puede pedirle que revise los cambios y solicitar sus permisos. Aceptar todos los cambios e instalar el paquete. Una vez que se instala el paquete es posible que se le ofrecen algunas actualizaciones basadas en el paquete que acaba de instalar. Se recomienda que conserve todo al día. Es sólo una cosa de una vez y que mantiene sus aplicaciones al día y seguro. Considere que una buena limpieza.
Vamos a utilizar estos espacios de nombres para importar las clases mediante el uso de declaraciones.
Después de instalar los paquetes NuGet, la aplicación de consola que acabamos de crear está listo para hacer uso de la clase RegistryManager. Esta clase se utiliza para añadir / quitar los dispositivos a / desde el registro del dispositivo IO Azure concentradores. En el área de instrucciones de este tutorial hemos proporcionado un ejemplo de código que utilizamos para desarrollar una aplicación que puede tener acceso al registro del dispositivo y realizar cambios en él.
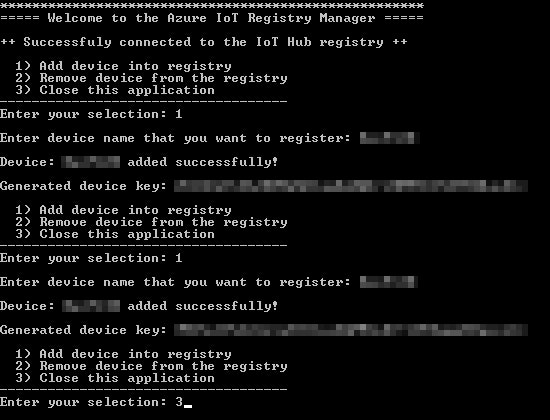
En este punto, se aconseja que usted mire en el código y trate de construir algo similar, de modo que se puede acceder y realizar cambios en el Registro de dispositivos IO Azure concentradores.
Con la ayuda de esta aplicación, puede dar algunos bien pensado identificaciones de los dispositivos a los Pies de frambuesa.
Finalmente llegamos al final de este tutorial. Hacia el final de esto, el Cuadro de mando Azure debe ser similar a esto:

Tome nota del número de dispositivos en la sección de la IO concentradores.