Hablamos pues de un sistema asequible que teóricamente podría sustituir equipos de aire acondicionado destacando el bajo consumo y su gran portabilidad.
Aunque la pulsera solo puede enfriar o calentar una pequeña zona del cuerpo, es absolutamente eficaz( incluso según su autor podría decirse que no menos de un aire acondicionado o un calefactor) consumiendo no más de 2,5 vatios.
Después de usar este sistema se empieza a sentir fresco dentro de muy poco tiempo ,tanto que incluso si el clima es muy caliente se siente una suave brisa que fluye constantemente hacia el poseedor de la pulsera
El autor ademas comenta que ha probado su diseño de pulsera en más de 50 personas en condiciones de temperatura diferentes y todos ellos tuvieron respuesta positiva.
Hardware
Cambiar la temperatura del cuerpo es muy difícil y se necesita una gran cantidad de energía,por eso con esta técnica de centrarnos en calentar o enfriar solo un parte del cuerpo (las muñecas ) sólo necesitamos cambiar la sensación térmica consumiendo en esa zona consumiendo por tanto mucho menos energía.
¿Cómo enfriando o calentando una pequeña zona de su cuerpo puede enfriar su cuerpo entero? Pues en realidad no cambia la temperatura de su cuerpo como lo hace un equipo de aire acondicionado o calefacción pues el trabajo de la pulsera es realmente «engañar» al cerebro con la percepción
Si se mantiene la mano en agua fría, inmediatamente se siente frío por un tiempo,pero después de que su cerebro procese el cambio de temperatura repentino al rato ya no sentirá frescor o por lo menos la sensación tan acusada así que en el caso de esta pulsera, si cambiamos la temperatura cada segundo, su cerebro no puede hacer frente a la sensación de la temperatura y seguirá sintiendo frescor mientras se ponga la pulsera aprovechando que los sensores térmicos de la muñeca son más sensibles que otra parte del cuerpo
Veamos esto empíricamente mediante un gráfico donde en abscisas indicaremos el tiempo trascurrido y en ordenadas la tasa de cambio de temperatura

Puede asumir que refrescarse o calentar su cuerpo lo hace esta pulsera pero realmente no es así . Algo cambia la temperatura de su muñeca cada segundo como se representa en el gráfico anterior o que hace que su cerebro pare de sentir que la temperatura está cambiando de un ambiente más caliente o más frío. La temperatura aumenta durante 6 segundos y la pulsera se apaga cada segundo de modo que el cambio continuo de la temperatura en la muñeca obliga a su cerebro a centrarse en la temperatura de su muñeca.
Así que las otras partes de su cuerpo no se sienten la temperatura del ambiente tan fuertemente como en las muñecas: es por eso que si su muñeca está siendo calentada por la pulsera, usted se sentirá caliente y si la muñeca está siendo enfriada, usted se sentirá fresco por lo que exactamente cuando usted use una pulsera de este tipo, no sentirá la temperatura del ambiente sino la inducida parcialmente por el dispositivo, pero si la temperatura no cambiase, su cerebro se ajustará con la temperatura de la muñeca en un tiempo y nuevamente se comienza a sentir la misma aunque cambie la temperatura de su cuerpo en una tasa pequeña.
Bien veamos ahora los compontes utilizados por este interesante proyecto:
1. Arduino Uno o Arduino Nano (esta ultima es una mejor opción que uno por ser de tamaño pequeño) 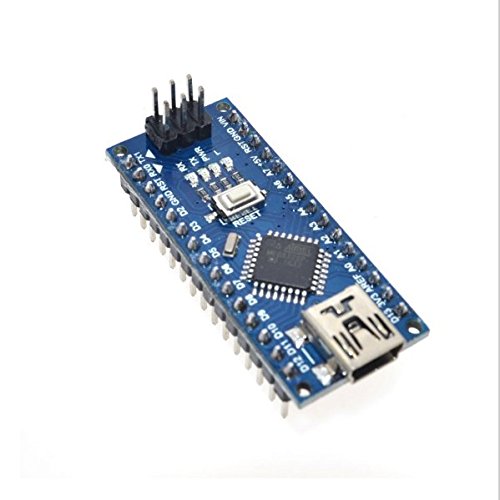
2. Módulo del controlador Motor L298N/L293D. pues cada pin en un Arduino puede manejar 40 mA así que conectar directamente la celula peltier a un pin arduino destruirá la placa arduino.Una opción seria usar un driver basado en relé que consume menos energia y es mas barato pero al requerir refrigerar o enfriar esto se consigue cambiando los hilos de alimentación por lo se requiere una electronica mas avanzada como por ejemplo un driver de motor pasos a paso de potencia 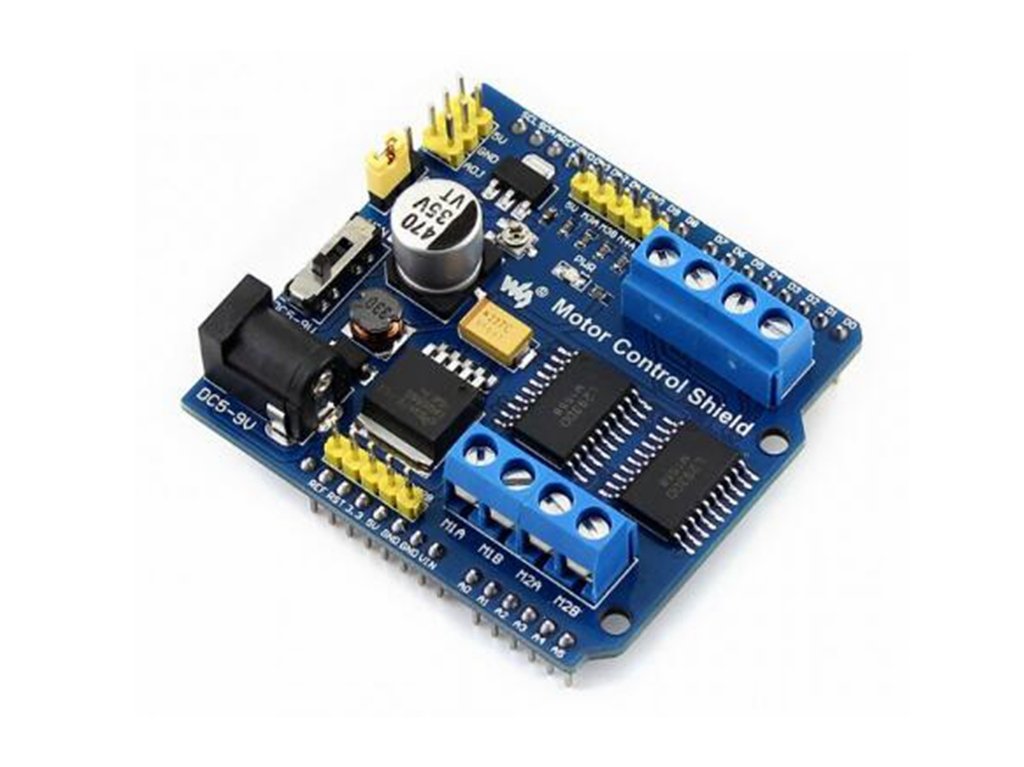
3.Módulo compatible con Arduino Bluetooth HC-06/HC-05
4. Sensor LM35 para medir la temperatura exterior 
5. Módulo peltier (se usa tanto para calefacción y refrigeración.) 
6.Varios : Disipador de calor, Correas de relojVelcro/reloj, cables de puente,Bateria de más 5 voltios,Ledas azul y Led rojo (para indicar si el dispositivo de enfriamiento o calefacción,Pasta térmica y el disipador térmico completo
Montaje célula Peltier
Ahora es el turno para hacer la pulsera asi que en primer lugar tendrá que adjuntar la célula de peltier con el disipador de calor así que tome el peltier y el disipador de calor.
Ponga pasta térmica en la parte posterior del disipador de calor y coloque el lado caliente de peltier con el disipador de calor como en la foto
Un aspecto particularmente es colocar la cara correcta al radiador que como se ve es la zona no seriegrafiada .
Ahora para fijar la célula peltier puede usar pegamento caliente como se muestra en la imagen.

Ahora tocaría fijar el radiador con la célula Peltier a una correa para lo cual se puede tomar un cable grueso y el disipador de calor usando un sistema similar al de un cuadro para que cree dos ganchos en forma de D en ambos lados del disipador de calor.
Ahora se puede utilizar pegamento caliente para unir el cable con el disipador de calor más fuertemente y para que el cable no salga de la pulsera.
Puede tomar la correa de Aun viejo reloj o correas de Velcro y fije los ganchos como las imágenes mediante el uso de pegamento caliente.

Ahora la pulsera está lista. Se puede diseñar mediante el uso de pegamento caliente en la parte superior del disipador de calor para que se vea más atractivo.
Diagrama del circuito, código y aplicación
El circuito usado para controlar la célula de Peltier es relativamente sencillo pues realmente hay un modulo bluetooth que invierte TX x RX y Rx xTX adema de alimentarse de la propia placa
- Arduino 3.3V >> módulo Bluetooth VCC
- Arduino Tx >> Bluetooth módulo Rx
- Arduino Rx >> Bluetooth módulo Tx
- Arduino GND >> Masa modulo Bluetooth
Ademas tenemos dos leds conectando el cátodo del Led azul al pin Pin 10 y al cátodo del led rojo al pin 11 .
El sensor de temperatura usado utiliza tres pines porque se puede alimentar el Peltier de un modo y entonces ofrecerá frio por la cara no serigrafiada y si se invierte la alimentación también se invierte el efecto térmico
- Arduino Pin A1 >> Vout del sensor LM35
- GND >>GND del LM35
- Vcc>>5v delLM35
Para la placa de potencia usaremos dos conexiones :
- Arduino Pin 3 >> Motor Driver en 1
- Arduino Pin 5 >> controlador de Motor en 2
- Arduino GND >> Masa modulo driver
Lógicamente de la salida de la placa aumentaremos el modulo de Peltier
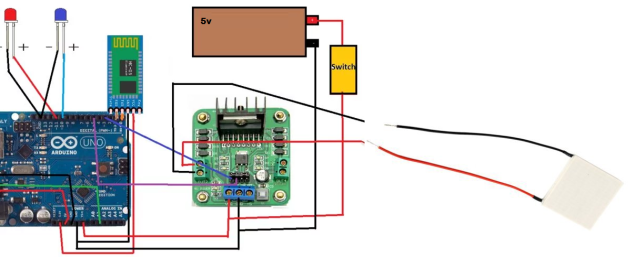
Resumidamente las conexiones son pues las siguientes:
- Arduino Vin >> Motor Driver VCC y la batería.
- Arduino 5V >> Vin del sensor LM35
- Arduino 3.3V >> módulo Bluetooth VCC
- Arduino Tx >> Bluetooth módulo Rx
- Arduino Rx >> Bluetooth módulo Tx
- Arduino Pin 3 >> Motor Driver en 1
- Arduino Pin 5 >> controlador de Motor en 2
- Arduino Pin 10 >> Led Blue(+)
- Arduino Pin 11 >> Led 7.Polarized
- Arduino Pin A1 >> Vout del sensor LM35
- Todos los componentes del suelo >> Battery(-)
- Motor Driver Out1 >> Peltier (cable rojo)
- Motor Driver Out2 >> Peltier (alambre negro)
El código usado los puede descargar desde Instructables.com

[Nota: pin Tx y Rx del módulo bt no debería conectarse a arduino mientras se cargan el código.]
Ahora es necesario poner todos los componentes en una caja. Utilice una caja que se puede poner fácilmente en su bolsillo.
La caja debe tener suficiente espacio para guardar todos los componentes y los mas pequeña posible para contener el arduino y otros componentes dentro de la caja. Puede hacer un área separada para la batería o ponerla aparte . Es interesante que el indicador led y el sensor de temperatura debe estar fuera de la caja. Los cables conectados con la peltier deben ser lo suficientemente largos que pueden mantener la caja en su bolsillo mientras que usa la pulsera en su mano.
App movil
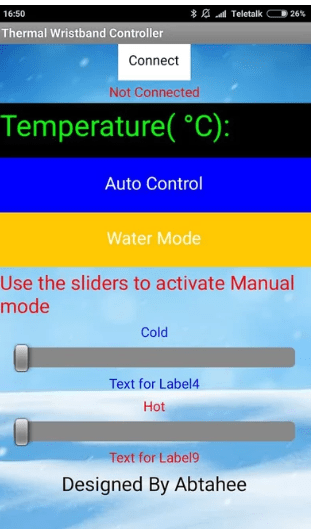
Se puede descargar e instalar la aplicación que ha diseñado el autor también desde instructables.com:
Active la conectividad bluetooth en su teléfono inteligente y encienda el dispositivo . Ahora abra la aplicación y pulse el botón conectar y emparejelo con el módulo bluetooth HC-06/HC-05.
La aplicacion dispone de tres modos:
- Auto Control:Si usted activa control automático pulsando el botón de auto control, la pulsera será calentar o enfriar te según la temperatura del ambiente. El dispositivo tiene un sensor de temperatura que mide la temperatura del ambiente. La temperatura se mostrará en su smartphone cuando se conecta el dispositivo con tu smartphone. Si la temperatura es superior a 28° C, enfriará y si la temperatura es inferior a 25° C, calentará. La velocidad de enfriamiento y la tasa de calentamiento depende de la temperatura se muestra en el gráfico anterior.
- Modo manual :Cuando no se siente satisfecho con el modo automático, se puede ir a través del modo manual usando los controles deslizantes para enfriar o calentar te según tus. Puede utilizar el modo después de trabajo físico o gimnasio para relajarse le para arriba. La temperatura del ambiente no importa si usas el modo manual.
- Modo de agua e:Si desea bañarse en agua fría o estanques, puede activar el modo de agua caliente te y esperar 4-5 minutos y usted sentirá el agua 1-2 grados más calientes que antes. Pero no funcionará efectivamente cuando el agua es demasiado fría. Pero en caso de enfriamiento o de calefacción, la pulsera funciona como encanto.
Si se utiliza el modo manual, no define la pulsera demasiado caliente o frío así que debe establecer la posición del control deslizante según sus preferencias


Debe estar conectado para enviar un comentario.