El Zumo 32U4 es un robot sumo compacto y altamente integrado basado en el microcontrolador Arduino compatible ATmega32U4. Mide menos de 10×10 cm y pesa alrededor de 160 gramos sin baterías, lo que le hace apto para competiciones Mini-Sumo. Está equipado con dos motores de alta potencia con reductora (modelos comunes incluyen reductoras de 50:1, 75:1 o 100:1), un controlador dual de motores, encoders para control cerrado, pantalla OLED programable y múltiples sensores (de línea, proximidad frontal y lateral, además de una unidad de medición inercial IMU con acelerómetro, giroscopio y magnetómetro).
El robot es programable directamente desde el entorno Arduino y no requiere montaje previo, solo es necesario añadir baterías y un cable USB para programarlo. Cuenta con sensores para detectar el enemigo en combates de sumo, así como opciones para personalización avanzada mediante acceso a líneas I/O y alimentación del microcontrolador. Además, tiene botones, un buzzer y LEDs para interacción y retroalimentación visual.
Como comentábamos el robot cuenta con dos motores con reductora (por ejemplo, reductoras de 75:1), sensores de proximidad y línea, encoders para el control de movimiento, y una pantalla de dos lineas LCD en su primer version y pantalla OLED en su ultima version para mostrar información. Además, incluye un conjunto variado de sensores como un arreglo frontal para detección, una unidad de medición inercial (IMU) que incorpora acelerómetro, giroscopio y magnetómetro, así como botones, LEDs y un buzzer para interacción. Se programa con facilidad a través del entorno Arduino, lo que permite desarrollar comportamientos avanzados para combate o exploración.
Es adecuado tanto para proyectos educativos como para competiciones gracias a su configuración lista para usar y su capacidad de personalización mediante programación.
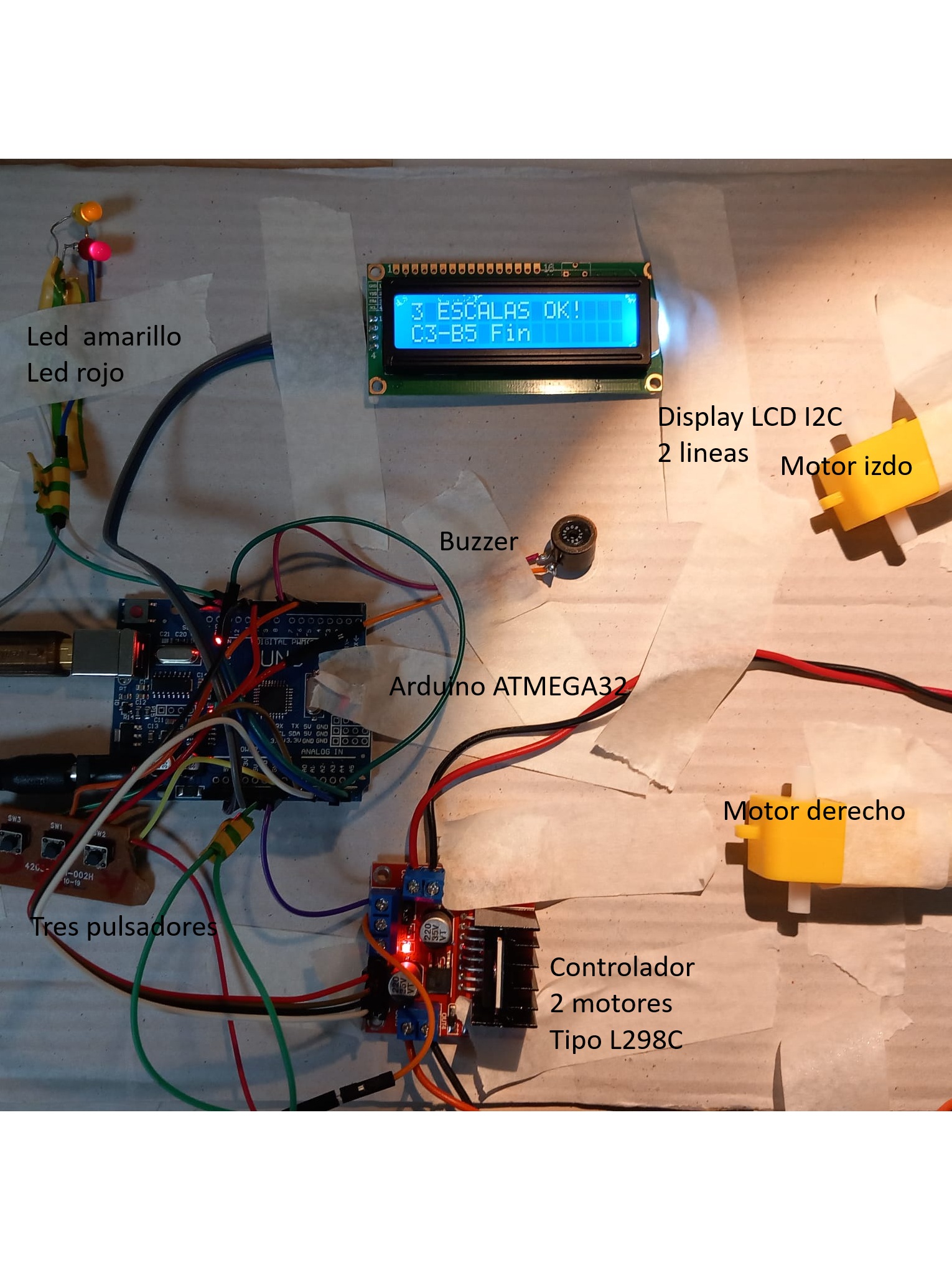
Ahora vamos a ver como es posible emular este simpático robot con componentes que podemos tener en nuestro cajón: un arduino uno, teclas , leds, el controlador l29c, una pantalla LCD y dos motorzitos de 12 V.
Emulacion del Zumo
Emular el Zumo 32U4 con una placa sencilla ATmega (tipo Uno o Nano) tiene bastante sentido en varios planos: técnico, económico y docente
En primer lugar, el coste y la disponibilidad. Un Zumo 32U4 completo con motores, encoders, sensores de línea, proximidad, IMU y pantalla OLED es una plataforma potente pero relativamente cara y no siempre accesible para cada alumno o cada experimento. Con un ATmega328P, un L298N, un par de DC pequeños, unos pulsadores, LEDs y un LCD I2C puedes replicar buena parte de la interfaz (botones, LEDs, display, buzzer y movimiento) por una fracción del coste, permitiendo tener más “robots” en el aula o en el laboratorio casero sin miedo a estropear hardware caro.
En segundo lugar, el control total del hardware y el aprendizaje de bajo nivel. El Zumo 32U4 “real” viene muy integrado: los motores, drivers, sensores y la propia placa están ya cableados y abstraídos con la librería Zumo32U4, lo que es ideal para proyectos rápidos pero oculta parte de la electrónica y del mapeo de pines. Al emularlo con un ATmega sencillo obligas a cablear tú mismo drivers, botones, buzzer y pantalla, a elegir pines, a entender PWM, direcciones de motor y pull-ups internos. Esto encaja muy bien con objetivos formativos en electrónica, microcontroladores y arquitectura Arduino, no solo en “programación de robots”.
En tercer lugar, la compatibilidad y la experimentación con código. La librería oficial de Pololu está pensada para ATmega32U4, pero muchos conceptos (máquinas de estados, control de motores, secuencias de LEDs, patrones de buzzer o menús de pantalla) se pueden portar y probar sobre un Uno emulando la API básica. Eso te permite desarrollar y depurar lógica de alto nivel (estrategias de sumo, sigue-líneas, evasión de obstáculos) sin tener aún el Zumo físico, o manteniendo el Zumo “real” para demostraciones mientras las iteraciones de código se prueban en clones baratos
Por último, está la robustez y el enfoque de investigación/experimentación. Con una plataforma emulada puedes introducir fallos controlados (desconectar un encoder, simular un motor más lento, cambiar relaciones de transmisión, probar distintos drivers H-bridge) sin riesgo para un robot cerrado y más delicado. Para clases, TFG/TFM o artículos que comparan arquitecturas, tener una versión “abierta” con ATmega sencillo te da más libertad de instrumentación, medición y modificación hardware que el Zumo comercial, manteniendo al mismo tiempo la referencia funcional de lo que hace el modelo original.
Veamos ya sin mas dilaciones la emulación del Zumo que proponemos desde este blog , la cual como podemos ver en el siguinte video es totalmente funcional y ha sido probada exhaustivamente
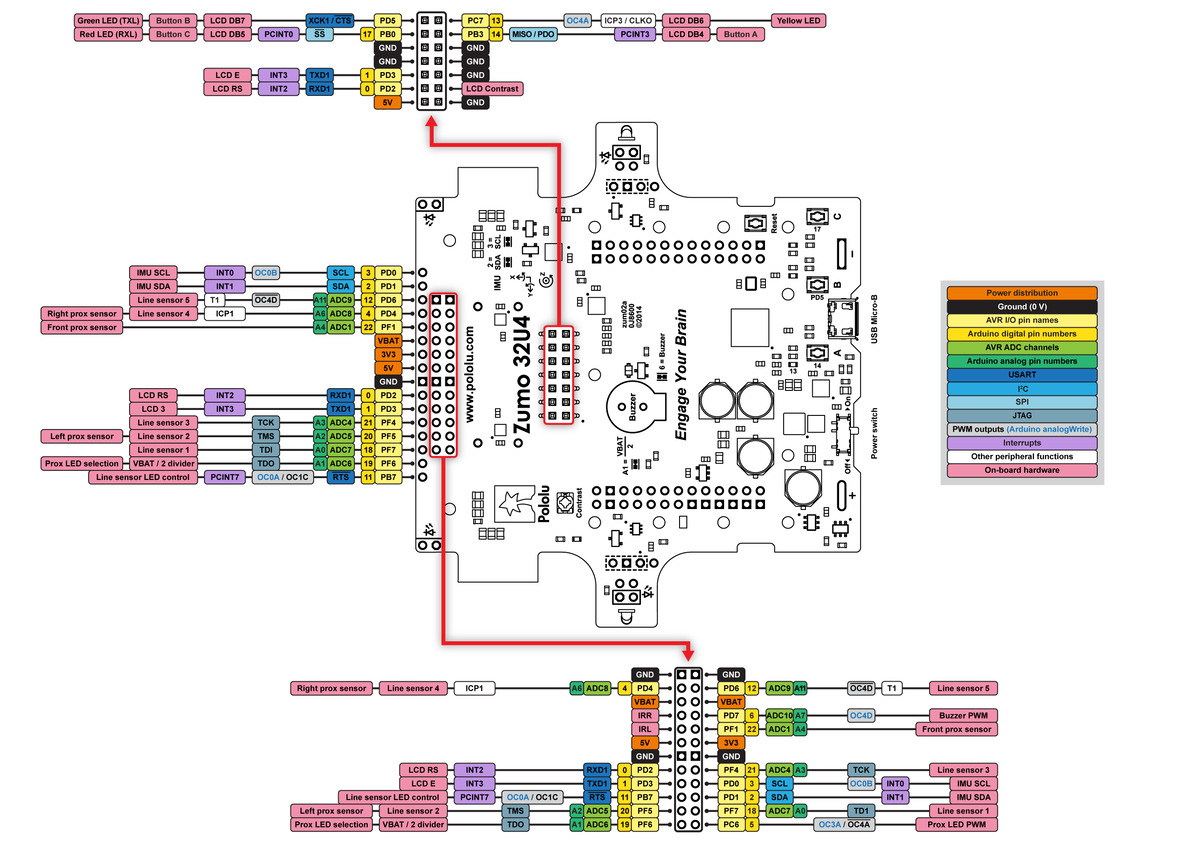
Conexiones de los Pulsadores
Los tres pulsadores del Zumo 32U4 están conectados a pines específicos del ATmega32U4 para entrada digital: Button A en el pin Arduino 14 (PB3/MISO), Button B en el pin PD5 (Green LED/TXL, compartido), y Button C en el pin 17 (PB0/SS, también Red LED/RXL). Estos pines permiten detectar pulsaciones mediante lectura digital y soportan interrupciones de cambio de pin (PCINT).
Conexiones de los Motores
Los dos motores se controlan mediante drivers H-bridge en el montaje se ha usado un L298C) con pines PWM y dirección: el motor izquierdo usa PWM en pin Arduino 10 (PB6/OC1B), dirección en pin 16 (PB2/MOSI); el motor derecho usa PWM en pin 9 (PB5/OC1A), dirección en pin 15 (PB1/SCK). Estos pines admiten salidas PWM para control de velocidad y lógica de dirección para giro.
Conexión del Buzzer
El buzzer está conectado al pin Arduino 6 (PD7/OC4D), que proporciona salida PWM de hardware para generar tonos y música alternando alto/bajo a frecuencias específicas. Puede desconectarse cortando un jumper superficial si se necesita el pin para otro uso.
Pines para Pulsadores
Para simular los tres pulsadores (A, B, C) en Arduino Uno, conectamos pulsadores normalmente abiertos reciclados de otros circuitos. Al ser entradas con pull-up interno no se necesitan resistencias externas (10kΩ a 5V):
- Pulsador A: Pin digital 14 (equivalente a PB3/MISO en 32U4) → usa pin 8 en Uno.
- Pulsador B: Pin digital PD5 (Green LED/TX) → usa pin 7 en Uno.
- Pulsador C: Pin digital 17 (PB0/SS, Red LED/RX) → usa pin 2 en Uno.
Lee con digitalRead() y debounce en software, similar a la librería Zumo32U4.
Pines para Motores
Controla los motores con drivers H-bridge (ej. L298N o TB6612) replicando PWM y dirección:
- Motor izquierdo: PWM pin 10 (PB6) → pin 9 en Uno; Dirección pin 16 (PB2) → pin 6 en Uno.
- Motor derecho: PWM pin 9 (PB5) → pin 10 en Uno; Dirección pin 15 (PB1) → pin 5 en Uno.
Avanzado: se puede usar analogWrite() para PWM y digitalWrite() para dirección; adaptando encoders a pines interrupción como 2/3 si los incluyes.
Pin para Buzzer
Conecta el buzzer (positivo a pin, negativo a GND) al pin 6 (PD7/OC4D) del 32U4 → pin 11 en Uno.
Genera tonos con tone(11, frecuencia) o PWM manual para música, replicando la librería ZumoBuzzer ( lo veremos mas adelante).
Notas: Arduino Uno (ATmega328P) no tiene ATmega32U4 nativo, así que ajusta código (sin USB nativo, librerías Zumo32U4 no son compatibles directamente). Usa pines libres para sensores adicionales; prueba con sketch básico de motores/botones primero.
Confirmación de Placa
La Arduino Uno R3 con ATmega328P es perfecta para simular el Zumo 32U4, ya que tiene suficientes pines digitales PWM (6), analógicos y interrupciones para replicar motores, pulsadores y buzzer. Cuenta con 14 pines digitales (0-13), 6 PWM (3,5,6,9,10,11) y memoria suficiente para código Zumo adaptado.
Pines Recomendados (Actualizados para Uno R3)
Usa esta asignación optimizada para ATmega328P, priorizando PWM e interrupciones:
Pulsadores (con pull-up interno via INPUT_PULLUP):
- Pulsador A: Pin A0
- Pulsador B: Pin d4
- Pulsador C: Pin d3 (interrupción INT0)
Motores (con driver H-bridge como L298N/TB6612FNG):
- Motor Izq. PWM: Pin d9
- Motor Izq. Dirección: Pin A2
- Motor Der. PWM: Pin D10
- Motor Der. Dirección: Pin A1
Display LCD (dirección 0X3F):
- SDA: Pin A4
- SCL: Pin A5
Buzzer: Pin D6 (PWM para tone())
Extras útiles:
Código Base de Ejemplo
A continuación vamos a ver un ejemplo algo mas elaborado del tipico led parpadeante usando los pulsadores. el lcd y los leds que hemos conectado a la placa Atmega con las conexiones apuntadas anteriormente:
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
//El LED amarillo debe:
//Pulsar A → ENCENDER (permanece encendido aunque sueltes)
//Pulsar B → APAGAR (permanece apagado hasta nuevo A)
LiquidCrystal_I2C lcd(0x3F, 16, 2);
#define BUTTON_A_PIN A0
#define BUTTON_B_PIN 4
#define BUTTON_C_PIN A3
#define LED_YELLOW_PIN 13
#define LED_RED_PIN 12
bool ledYellowState = false; // Estado RECORDADO del LED amarillo
bool lastBtnA = false; // Estado anterior botón A (anti-rebote)
bool lastBtnB = false; // Estado anterior botón B (anti-rebote)
void setup() {
Wire.begin();
lcd.init(); lcd.backlight(); lcd.clear();
lcd.setCursor(0,0); lcd.print("Zumo32U4 Toggle");
delay(1500);
pinMode(BUTTON_A_PIN, INPUT_PULLUP);
pinMode(BUTTON_B_PIN, INPUT_PULLUP);
pinMode(BUTTON_C_PIN, INPUT_PULLUP);
pinMode(LED_YELLOW_PIN, OUTPUT);
pinMode(LED_RED_PIN, OUTPUT);
}
void loop() {
bool btnA = digitalRead(BUTTON_A_PIN) == LOW;
bool btnB = digitalRead(BUTTON_B_PIN) == LOW;
bool btnC = digitalRead(BUTTON_C_PIN) == LOW;
// DETECTAR FLANCO ↓ (pulsación, no mantener)
bool btnA_pressed = btnA && !lastBtnA; // Solo en el momento de pulsar
bool btnB_pressed = btnB && !lastBtnB;
// TOGGLE LED AMARILLO
if (btnA_pressed) {
ledYellowState = true; // ← ENCIENDE (latch)
}
if (btnB_pressed) {
ledYellowState = false; // ← APAGA (latch)
}
// Aplicar estado al LED
digitalWrite(LED_YELLOW_PIN, ledYellowState);
// LED ROJO: ON cuando botón A NO está pulsado (comportamiento anterior)
digitalWrite(LED_RED_PIN, !btnA);
// Actualizar display
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("A:"); lcd.print(btnA ? "ON " : "OFF");
lcd.print("B:"); lcd.print(btnB ? "ON " : "OFF");
lcd.print("C:"); lcd.print(btnC ? "ON" : "OFF");
lcd.setCursor(0, 1);
lcd.print("Yel:"); lcd.print(ledYellowState ? "ON " : "OFF");
lcd.print("Red:"); lcd.print(digitalRead(LED_RED_PIN) ? "ON" : "OFF");
// Guardar estados anteriores (anti-rebote)
lastBtnA = btnA;
lastBtnB = btnB;
delay(50);
}
Este programa controla dos LEDs (amarillo y rojo) y muestra el estado de tres pulsadores en un LCD I2C de 16×2, emulando parte de la interfaz de un Zumo32U4 con un ATmega328P. En setup() inicializa el bus I2C, el display (dirección 0x3F), enciende la retroiluminación y configura los pines de los botones con INPUT_PULLUP (reposo en HIGH, pulsado en LOW) y los LEDs como salidas. El comentario inicial indica la intención: el LED amarillo debe encenderse al pulsar A y permanecer encendido aunque se suelte, y apagarse al pulsar B y permanecer apagado hasta una nueva pulsación de A.
En el loop(), el código lee el estado actual de los tres botones y calcula dos señales de flanco descendente (btnA_pressed y btnB_pressed): solo se ponen a true cuando se detecta un cambio de no pulsado a pulsado, usando las variables lastBtnA y lastBtnB como memoria simple de anti-rebote. Si se detecta una pulsación de A, la variable ledYellowState pasa a true y el LED amarillo se enciende; si se detecta una pulsación de B, ledYellowState pasa a false y el LED se apaga, de modo que el LED amarillo queda “latched” hasta la siguiente orden, no depende de mantener el botón. El LED rojo se enciende siempre que el botón A no esté pulsado (!btnA), de forma directamente ligada al estado instantáneo del botón.
Finalmente, el programa actualiza el LCD en cada pasada borrando la pantalla y escribiendo en la primera línea el estado ON/OFF de los botones A, B y C, y en la segunda línea el estado de los LEDs amarillo y rojo, lo que permite ver en tiempo real tanto las lecturas de los pulsadores (con lógica de INPUT_PULLUP) como el estado memorizado del LED amarillo. Tras actualizar el display, guarda los estados actuales de A y B en lastBtnA y lastBtnB para la siguiente detección de flancos, y añade un delay(50) que ayuda a estabilizar lecturas y reducir rebotes sin bloquear en exceso el sistema.

Debe estar conectado para enviar un comentario.