En efecto como vimos en un post anterior donde probamos el sensor PZEM004 junto con un sensor DHT11 con un ESP32, en este post vamos a intentar capturar las medidas sin el HA (Home Assistant) las lecturas de temperatura, humedad, voltaje, corriente, frecuencia, potencia y factor de potencia desde cualquier ordenador.
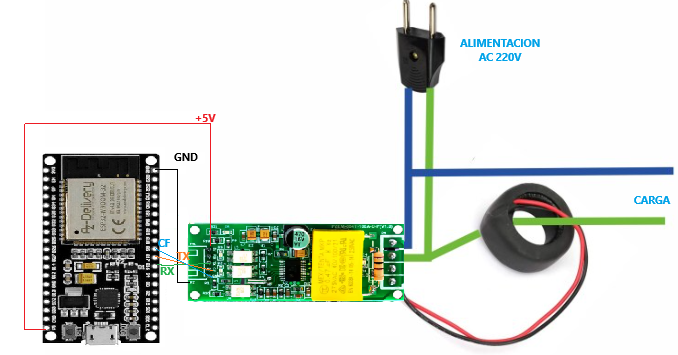
En cuanto a las conexiones, seguiremos el mismo esquema bastante simple que ya vimos y que puede ajustarse a diversas necesidades y configuraciones. Como ya se comentado, se ha optado además del citado modulo sensor de consumo PZEM004 , usar el clásico sensor de humedad y temperatura ( DHT11 ) y que hemos visto en numerosos proyectos de este blog. Por otra parte como »cerebro» usaremos el potente microcontrolador como es un ESP32, que gracias a su conectividad WIFI nos va a permitir enviar las medidas . Por ultimo el montaje se completa con una fuente sellada de 5V ultra-miniatura ( aunque un cargador USB debería también ser suficiente).
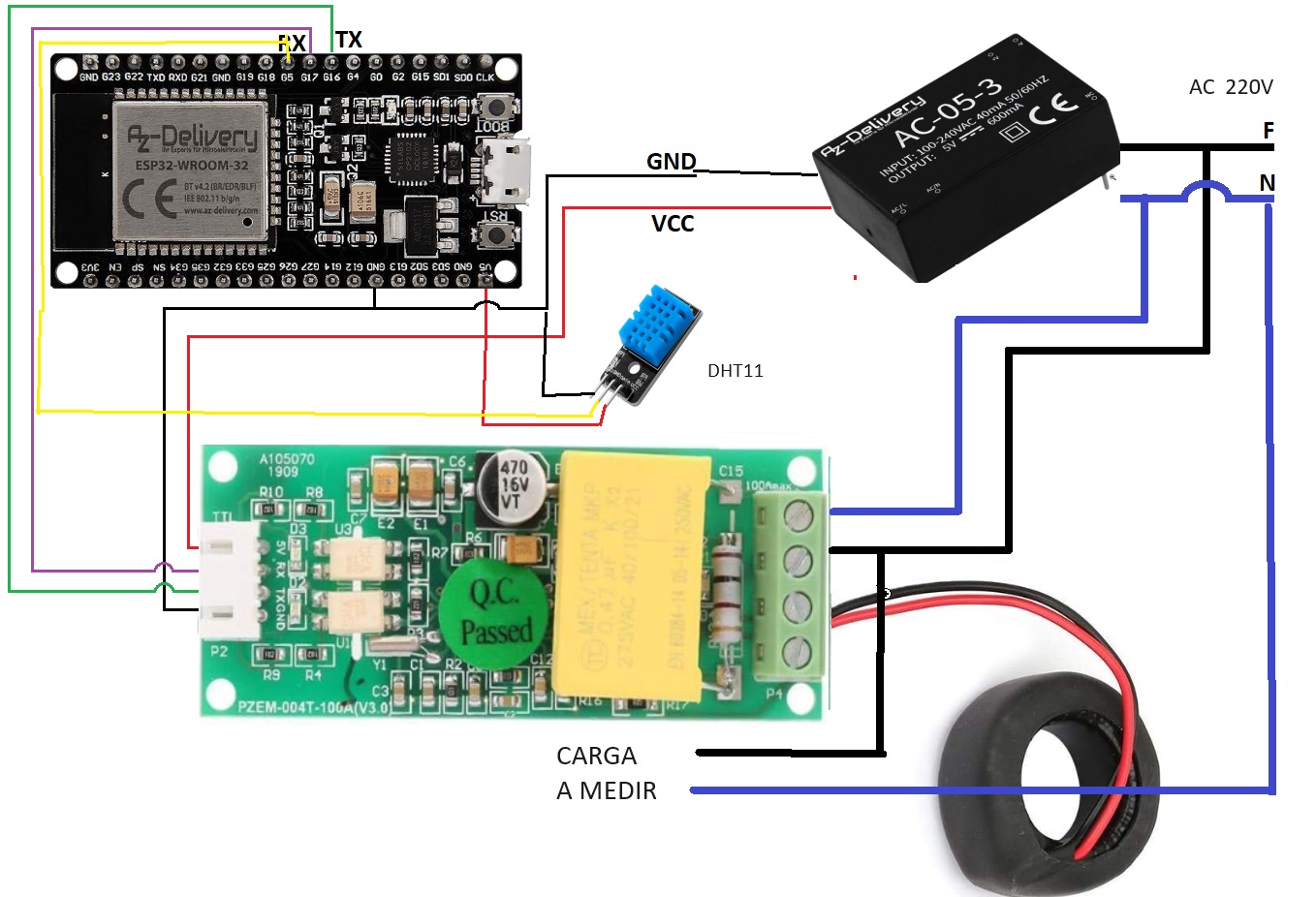
Los componentes como vemos son de los mas normales:
- Un módulo ESP32 que usaremos para obtener los datos del medidor y transmitirlos por Wi-Fi a nuestro servidor. Puedes encontrar distintos modelos en Amazon.
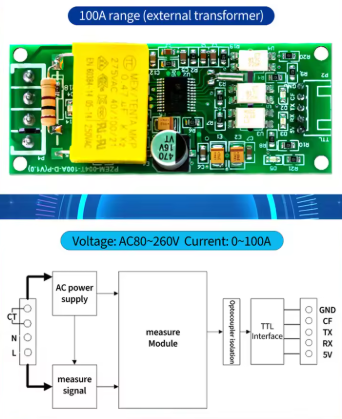
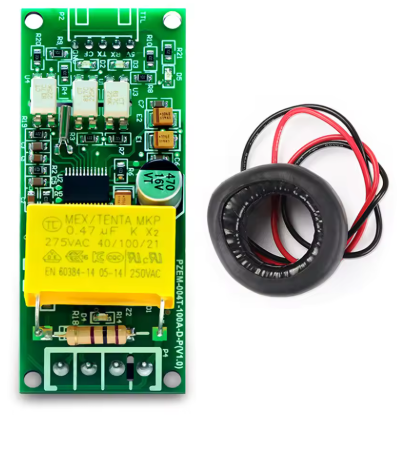
- Medidor PZEM-004T V3 que puedes comprar en Amazon. También vale la versión 1, pero ofrece menos datos.
- Un sensor DHT11 ( se puede comprar también en Amazon)
- Una pinza / anillo de corriente CT. Normalmente incluido con el medidor, ha de aguantar como mínimo la intensidad límite que aguante la línea que vamos a medir. Puede elegir si usar una pinza, que, aunque no requiere la desconexión del cable que queremos medir, nos da unos datos menos precisos, o un anillo, que tiene más precisión, pero requiere que previamente pasemos el cable, con lo que habrá que desmontarlo.
- Cables dupont para conectar ambos dispositivos ( hembra-hembra). Aunque lo ideal es realizar un circuito puedes usar cables dupont y una placa de desarrollo para realizar el tutorial.
- Una fuente sellada de 5V de al menos 100mA , aunque puede usarse un cargador USB .Este tipo de fuente sellada por cierto la podemos encontrar de nuevo en Amazon.
- Cables Azul y Marrón para enchufar el medidor PZEM-004T a la corriente.
Software
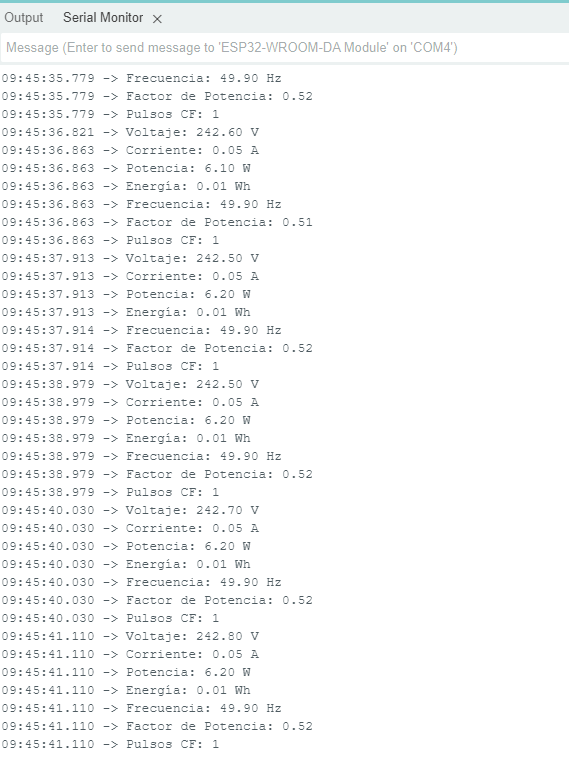
Se aconseja probar el circuito anterior primero con el sketch que ya vimos en un post anterior y cuando todas las medidas sean mostradas correctamente en la consola serie de Arduino, y el servidor HA este funcionando, seguir con los siguientes pasos. Si te estas preguntando porque necesitamos HA si el titulo del post era precisamente lo contario, en mi defensa diré que vamos a usar Esphome finalmente pero para configurarlo necesitamos HA.
Primero vamos a meter el software generado con ESPHome al módulo ESP32 para lo cual tendremos que taner instalado en nuestro HomeAssistant el añadido de ESPHome.
Bien, una vez conectado el montaje a nuestro PC y el ESP32 con un cable USB a nuestro PC con el que ya cargamos el skecth de pruebas, vamos a cambiar totalmente el fw del ESP32 para que pueda entenderse este con el HomeAssistant.
El siguiente código es solo una plantilla que se puede adaptar a las necesidades de cada uno: Vamos a desglosar la sintaxis de este fichero de configuración para ESPHome:
Encabezado y Configuración Básica
esphome:
name: "medidor-consumo-pzem004t" # Nombre del dispositivo
platform: ESP32 # Plataforma utilizada (ESP32)
board: nodemcu-32s # Placa específica utilizada
Configuración de WiFi
wifi:
ssid: "AAAAAAAAAA" # Nombre de la red WiFi
password: "XXXXXXXXX" # Contraseña de la red WiFi
manual_ip:
static_ip: 192.168.1.74 # IP estática del dispositivo
subnet: 255.255.255.0 # Máscara de subred
gateway: 192.168.1.1 # Puerta de enlace
API para Home Assistant
api:
encryption:
key: "ZZZZZZZZZ" # Clave de encriptación para la API
Servidor Web
web_server:
port: 80 # Puerto del servidor web (opcional)
Actualización OTA
ota:
# password: "ZZZZZZZZZZZZZZZZZZZZZZ" # Contraseña para OTA (opcional)
Registro de Logs
logger:
# baud_rate: 0 # Tasa de baudios para el registro (opcional)
Configuración UART
uart:
rx_pin: 16 # Pin RX
tx_pin: 17 # Pin TX
baud_rate: 9600 # Tasa de baudios
stop_bits: 1 # Bits de parada (opcional)
Sensores
Sensor DHT11
sensor:
- platform: dht
pin: 4 # Pin donde está conectado el sensor DHT11
temperature:
name: "Temperature" # Nombre del sensor de temperatura
unit_of_measurement: °C # Unidad de medida
humidity:
name: "Humidity" # Nombre del sensor de humedad
unit_of_measurement: '%' # Unidad de medida
update_interval: 1s # Intervalo de actualización
Sensor PZEM-004T
- platform: pzemac
address: 0xF8 # Dirección del dispositivo PZEM-004T
current:
name: "Current" # Nombre del sensor de corriente
voltage:
name: "Voltage" # Nombre del sensor de voltaje
energy:
name: "Energy" # Nombre del sensor de energía
power:
name: "Power" # Nombre del sensor de potencia
frequency:
name: "Frequency" # Nombre del sensor de frecuencia
power_factor:
name: "Power Factor" # Nombre del sensor de factor de potencia
update_interval: 1s # Intervalo de actualización
LED de Estado
status_led:
pin: 2 # Pin del LED de estado
Este fichero configura un dispositivo ESP32 con varios sensores y funcionalidades, incluyendo conexión WiFi, API para Home Assistant, servidor web, actualización OTA, y registro de logs. Cada sección tiene su propósito específico y se puede ajustar según las necesidades del proyecto usando todos los sensores que necesitemos.
Home Assistant en un PC
En efecto puedes ejecutar Home Assistant en un PC. Aunque muchas personas optan por usar una Raspberry PI 3 o similar , dada la potencia de calculo necesaria no siempre es la mejor opción. Bajo mi opinión un NUC o un viejo portatil es mas idónea.
La manera mas rapida y fácil es crear una imagen de HA Core en un USB , forzar el arranque desde USB e instalarla ( pero esto formateara el disco del PC ). También hay algunas otras opciones para hacerlo:
1. Usar una Máquina Virtual
Puedes instalar Home Assistant en una máquina virtual utilizando software como VirtualBox o VMware. Aquí tienes los pasos básicos:
- Descargar e instalar VirtualBox:
- Ve a la página de descargas de VirtualBox y descarga la versión correspondiente a tu sistema operativo.
- Instala VirtualBox siguiendo las instrucciones del instalador.
- Descargar la imagen de Home Assistant:
- Ve a la página de instalación de Home Assistant y descarga la imagen para VirtualBox.
- Crear una nueva máquina virtual:
- Abre VirtualBox y crea una nueva máquina virtual.
- Selecciona «Linux» como tipo de sistema operativo y «Other Linux (64-bit)» como versión.
- Asigna al menos 2 GB de RAM y 32 GB de almacenamiento.
- Usa la imagen de Home Assistant descargada como disco duro virtual.
- Configurar la red:
- Configura el adaptador de red como «Adaptador puente» para que la máquina virtual tenga acceso a la red local.
- Iniciar la máquina virtual:
- Inicia la máquina virtual y espera a que Home Assistant se configure.
- Accede a Home Assistant desde tu navegador usando la dirección IP de la máquina virtual y el puerto 8123.
2. Usar Docker
Otra opción es ejecutar Home Assistant en un contenedor Docker. Aquí tienes los pasos básicos:
- Instalar Docker:
- Ve a la página de Docker y descarga Docker Desktop para tu sistema operativo.
- Instala Docker siguiendo las instrucciones del instalador.
- Ejecutar Home Assistant en Docker:
- Abre una terminal y ejecuta el siguiente comando para descargar y ejecutar Home Assistant:
docker run -d --name homeassistant --restart=unless-stopped -p 8123:8123 -v /path/to/your/config:/config --network=host ghcr.io/home-assistant/home-assistant:stable - Reemplaza
/path/to/your/configcon la ruta donde quieres almacenar la configuración de Home Assistant.
- Abre una terminal y ejecuta el siguiente comando para descargar y ejecutar Home Assistant:
- Acceder a Home Assistant:
- Abre tu navegador y ve a
http://localhost:8123para acceder a Home Assistant.
- Abre tu navegador y ve a
3. Instalar Home Assistant Core
También puedes instalar Home Assistant Core directamente en tu sistema operativo usando Python. Aquí tienes los pasos básicos:
- Instalar Python:
- Asegúrate de tener Python 3.8 o superior instalado en tu PC.
- Crear un entorno virtual:
- Abre una terminal y ejecuta los siguientes comandos:
python3 -m venv homeassistant cd homeassistant source bin/activate
- Abre una terminal y ejecuta los siguientes comandos:
- Instalar Home Assistant Core:
- Con el entorno virtual activado, instala Home Assistant Core:
pip install homeassistant
- Con el entorno virtual activado, instala Home Assistant Core:
- Iniciar Home Assistant:
- Ejecuta Home Assistant:
hass
- Ejecuta Home Assistant:
- Acceder a Home Assistant:
- Abre tu navegador y ve a
http://localhost:8123para acceder a Home Assistant.
- Abre tu navegador y ve a
ACCESO SIN HOMEASSISTANT AL ESPHOME
Puedes capturar las medidas devueltas desde el interfaz web de ESPHome para después olvidarnos de Home Assistant. Veamos las opciones:
1. Usar el Servidor Web de ESPHome
ESPHome permite configurar un servidor web en el dispositivo, desde el cual puedes acceder a los datos de los sensores. Aquí tienes los pasos básicos:
- Configurar el servidor web en ESPHome: Asegúrate de tener la siguiente configuración en tu archivo YAML de ESPHome:
web_server: port: 80 - Acceder al servidor web:
- Una vez que el dispositivo esté configurado y conectado a tu red WiFi, abre un navegador web.
- Ingresa la dirección IP del dispositivo en la barra de direcciones (por ejemplo,
http://192.168.1.74). - Verás una página con los datos de los sensores configurados.
2. Usar Solicitudes HTTP (Webhooks)
Puedes configurar ESPHome para enviar datos a un servidor externo mediante solicitudes HTTP. Aquí tienes un ejemplo de cómo hacerlo:
- Configurar el sensor para enviar datos: Añade la siguiente configuración a tu archivo YAML de ESPHome:
http_request: url: http://tu-servidor.com/endpoint method: POST headers: Content-Type: application/json body: '{"temperature": "{{ temperature }}", "humidity": "{{ humidity }}"}' - Configurar una automatización para enviar los datos:
automation: - alias: "Enviar datos del sensor" trigger: platform: time at: '00:00:00' action: - http_request.post: url: http://tu-servidor.com/endpoint json: temperature: !lambda 'return id(temperature).state;' humidity: !lambda 'return id(humidity).state;'
3. Usar MQTT
Otra opción es usar MQTT para enviar los datos a un broker MQTT, desde donde puedes capturarlos con otros servicios o aplicaciones.
- Configurar MQTT en ESPHome: Añade la siguiente configuración a tu archivo YAML de ESPHome:
mqtt: broker: "192.168.1.10" username: "usuario" password: "contraseña" - Configurar los sensores para publicar en MQTT:
sensor: - platform: dht pin: 4 temperature: name: "Temperature" state_topic: "home/sensor/temperature" humidity: name: "Humidity" state_topic: "home/sensor/humidity"
4. Usar Node-RED
Node-RED es una herramienta de programación visual que puede capturar y procesar datos de ESPHome mediante HTTP o MQTT.
- Instalar Node-RED:
- Puedes instalar Node-RED en tu PC o en un servidor.
- Configura un flujo para recibir datos de ESPHome mediante HTTP o MQTT.
- Configurar un nodo HTTP o MQTT en Node-RED:
- Configura un nodo HTTP para recibir datos desde ESPHome.
- Configura un nodo MQTT para suscribirse a los temas de los sensores de ESPHome.
Estas son algunas formas de capturar medidas desde el interfaz web de ESPHome sin tener instalado Home Assistant.
MANERA DE CAPTURAR LOS DATOS DE MEDIDA DESDE PYTHON
Ya que tenemos el servidor web de ESPHome configurado y funcionando, puedes recuperar los datos de las medidas en tiempo real y guardarlos en un fichero utilizando un script en Python. Aquí tienes un ejemplo de cómo hacerlo:
Paso 1: Instalar las Dependencias
Primero, asegúrate de tener Python instalado en tu PC. Luego, instala las bibliotecas necesarias:
pip install requests
Paso 2: Crear el Script en Python
Crea un archivo llamado recuperar_datos.py y añade el siguiente código:
import requests
import time
import csv
# URL del servidor web de ESPHome
url = "http://192.168.1.74"
# Ruta del fichero CSV donde se guardarán los datos
csv_file = "medidas.csv"
# Función para recuperar los datos del servidor web
def obtener_datos():
response = requests.get(url)
if response.status_code == 200:
return response.json()
else:
print("Error al obtener los datos")
return None
# Función para guardar los datos en un fichero CSV
def guardar_datos(datos):
with open(csv_file, mode='a', newline='') as file:
writer = csv.writer(file)
writer.writerow([
time.strftime("%Y-%m-%d %H:%M:%S"),
datos.get("Current"),
datos.get("Energy"),
datos.get("Frequency"),
datos.get("Humidity"),
datos.get("Power"),
datos.get("Power Factor"),
datos.get("Temperature"),
datos.get("Voltage")
])
# Encabezados del fichero CSV
with open(csv_file, mode='w', newline='') as file:
writer = csv.writer(file)
writer.writerow([
"Timestamp", "Current", "Energy", "Frequency", "Humidity", "Power", "Power Factor", "Temperature", "Voltage"
])
# Bucle para recuperar y guardar los datos periódicamente
while True:
datos = obtener_datos()
if datos:
guardar_datos(datos)
time.sleep(60) # Esperar 60 segundos antes de la siguiente lectura
Paso 3: Ejecutar el Script
Ejecuta el script en tu terminal:
python recuperar_datos.py
Este script hará lo siguiente:
- Obtener los datos del servidor web de ESPHome.
- Guardar los datos en un fichero CSV con un timestamp.
- Repetir el proceso cada 60 segundos.

Debe estar conectado para enviar un comentario.