En este proyecto realizado por GreatScottlab podemos ver cómo utilizar un LCD KIt de 1280 x 800 para construir un mini -monitor autoalimentado por baterías, el cual puede ser útil para una cámara DSLR, como pantalla para la Raspberry Pi o simplemente para ampliar el campo de visión del ordenador.
Realmente la idea del circuito no es mala porque no es habitual encontrar en el mercado monitores alimentados a batería que puedan servir para nuestra Raspberry PI así que veamos como lo ha construido
A continuación la lista de materiales usados por GreatScottlab :
- 1 x 1280 x 800 LCD Kit
- 5 x pulsadores táctiles:
- 1 x 5mm verde y rojo:
- 1 x interruptor
- 1 cargador de celular solo x TP4056: Se puede comprar en Amazon por unos 6€
- 1 x XL6009 convertidor: Se puede compra en Amazon por menos de 5€
- Baterías de ion de litio 2 x 18650 2800mAh.
- 1 x trípode.
- 1 x Mini trípode
El kit lcd
En caso de usarlo para la Raspberry Pi se sugiere editar el fichero config.txt para configurar el cable hdmi a la resolución nativa 1280 x 800 en caso de no detecte correctamente la resolución (la forma más fácil de editar el config.txt es poner la tarjeta microsd de lapi en un ordenador y editar config.txt con cualquier editor de texto y guardar.
Las características del kit del panel son las siguientes:
- Tamaño del panel: 10.1″
- Resolución (rgb): wxga 1280 x 800.
- Brillo: 350CD/m ^ 2
- Voltaje de funcionamiento: 12v (actual requisito 1a-2a)
- La potencia nominal: 6-7w
- Entrada de señal: AV + VGA + HDMI (HDMI 1.2)
Pantalla dimensiones: 217 x 135 mm / 16:10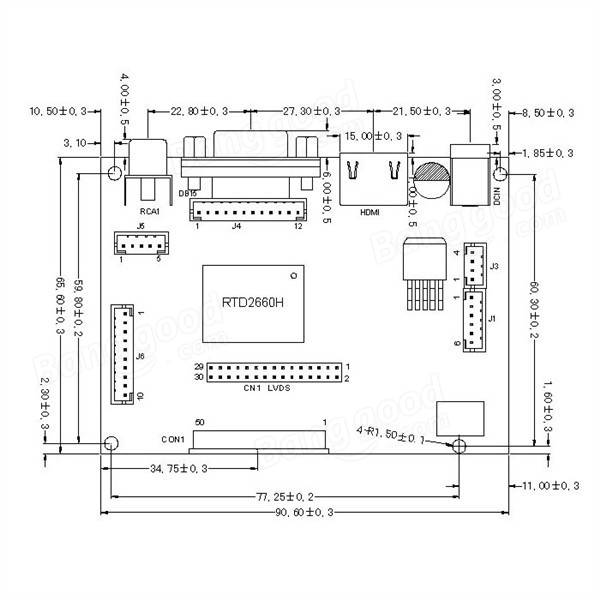
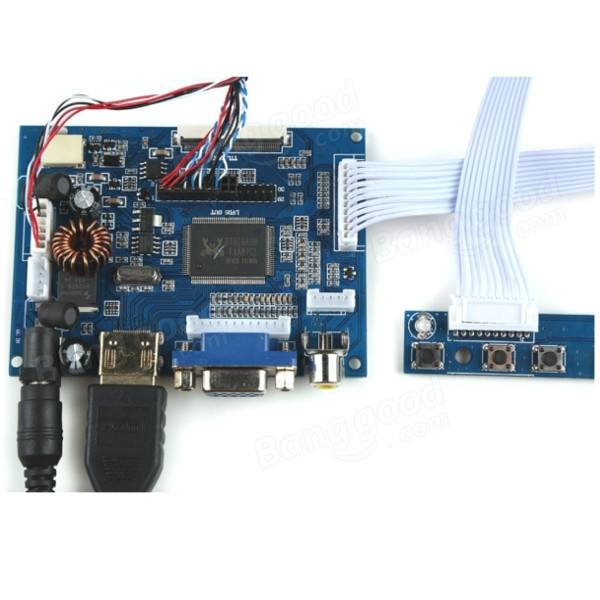
Como vemos el kit consta de una controladora , el panel lcd y una pequeña botonera ambos unidos por sendos cables de cinta.
Convertidor DC
En el proyecto se usa el modulo DSN6009 , que un módulo conversor dc-dc de refuerzo de alto rendimiento (BOOST) con una corriente de conmutación de 4A.
La tensión de entrada soportada va desde los 3V hasta 32V, pero el mejor voltaje de funcionamiento es 5 ~ 32V. La tensión de salida es variable entre 5v a 35V
Cuenta con un interruptor incorporado de tipo MOSFET de alta eficacia soportando 4A, siendo la eficacia de hasta 94%; (la corriente LM2577 es sólo 3A)
Gracias a la alta frecuencia de conmutación de 400KHz, se puede alcanzar resultados muy buenos con una pequeña capacidad del condensador del filtro (la frecuencia de LM2577 es solamente 50KHz)
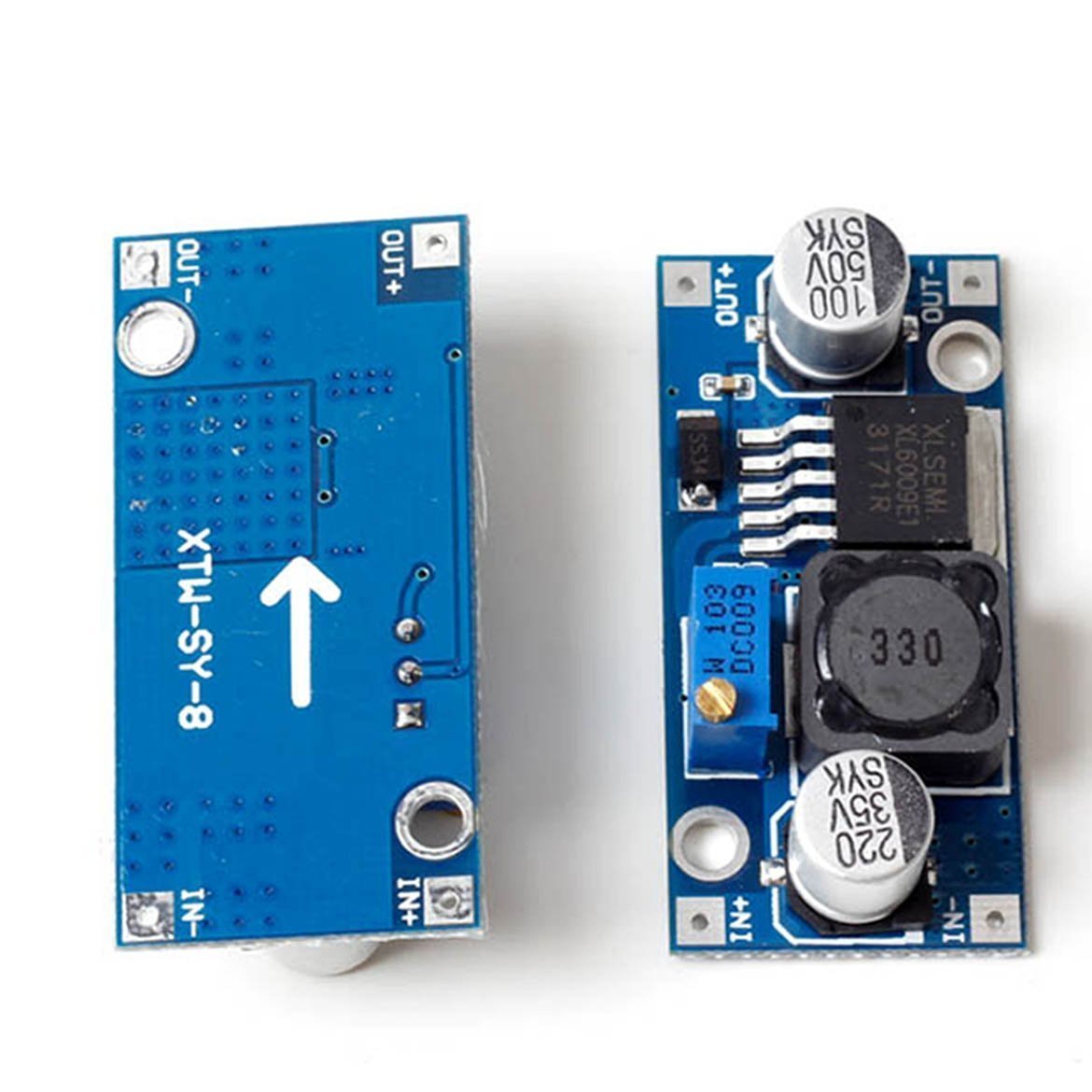
El conexionado, como vemos, es bastante sencillo pues en los pines IN+ y IN – conectaremos el polo +(IN+) y la masa(IN-) de la salida de 5V procedentes de la salida del cargador de batería .
Para este proyecto debe ajustarse el modulo regulando el trimmer para obtener una salida de 12V DC.
De los pines OUT + y OUT- conectaremos bien mediante un jack a la placa del interfaz de la placa del lCD ( la masa del jack a OUT- y el pin central al pin OUT+) o bien soldandolos a la placa madre del kit lcd como en la foto:
Cargador batería


- Voltaje de entrada: 4,5 hasta 5 V
- Corriente de carga máxima 1000 milivatio amperios
- Voltaje de apagado al cargar 4,2 V +/-1%
- Protección de bajo voltaje de 2,5 V
- Protección contra cortocircuitos en 3 amperios
- Dimensiones: 26 x 17 x 2 mm
Construcción de la caja
No todo el mundo tiene disponible un impresora 3d, asi que GreatScottlab decidio hacer la caja con materiales tradicionales como es la madera
En la foto se pueden ver as las medidas de las piezas MDF que GreatScottlab creo para construir la caja.
Cableado
Finalmente en al siguiente foto vemos el montaje final
El cableado es pues sencillo y cabe perfectamente dentro de la caja así que de esta forma que todo debería funcionar bien.
Aqui podemos ver el resultado final
¡Acabamos de ver como crear un monitor mini portátil casero!
Por si nos ha quedado alguna duda en los dos siguientes videos podemos ver el proceso de montaje paso a paso con todo lujo de detalles desde las coenxiones electricas y pruebas pertinentes a la construcción de la propia caja que contendrá todas la electronica:
En el video continuacion del anteriro podemso ver oda la información fundamental del montaje de kla caja que se necesitaría para la construcción de este proyecto:
¿Se atrevería a montarlo usted también?
Fuente Instructables.com


Debe estar conectado para enviar un comentario.