En esta post volveremos a un tema recurrente en este blog: la medición del consumo eléctrico de forma invasiva en un ambiente doméstico ,pero esta vez usaremos el medidor CHINT DDS666,lo que técnicamente es un medidor residencial o residencial tradicional pero con una salida óptica (también llamada salida de pulsos)-
Precisamente por esa característica de salida óptica, dado que en el mercado existe una amplia variedad de dispositivos con este tipo de salida , esta propuesta que vamos a ver es perfectamente viable también para todo tipo de contadores con salida de pulso, como la mayoría de los contadores modernos para uso personal que se comercializan para fijar en carril DIN en el cuadro de distribución de c.a. cuya velocidad de flash de salida de prueba es de 500 impulsos por kWh ( es decir cada impulso corresponde a un 2W/H)
Lógicamente dado que la relación de pulsos/kwh es diferente según el contador , tendremos que ajustar el código de nuestro programa para que el resultado sea exacto , pero insistimos: como esta relación es conocida no es demasiado complejo ajustar el código para el contador que elijamos
Advertencia: Se recomienda precaución ya que este tipos de proyectos implican riesgo eléctrico o electrocución ya que se utiliza un equipo conectado de 220VCA -120 VCA por los que se requieren conocimientos básicos de electricidad , por favor esté documentado previamente en este sentido.
Conviene recordar que por seguridad cuando trabaje en cuadros de baja tensión siempre trabaje cortando la alimentación general y asegúrese después con un polímetro o un busca-polos que efectivamente no hay tensión c.a.
Obviamente si no se tiene experiencia en cableados de baja tensión o no esta seguro de la instalación , le recomendamos encarecidamente que este tipo de trabajos lo realice un instalador o un electricista pues manejar por error tensiones de ca puede ser peligroso .
El circuito
El viejo modelo CHINT DSS66 permite la medición de energía activa o potencia activa en instalaciones domésticas. Es un registrador ciclométrico, registrando medidas siempre positivas que evitan pérdidas fraudulentas de conexiones. Como se trata de un medidor invasivo que se requiere para abrir nuestro circuito eléctrico, se capturan los pulsos generados, Genera 3200 imp / kWh, que nos permitirá medir la potencia y el consumo de energía. El medidor tiene un optoacoplador para aislar la salida de pulso para realizar la medición.
Algunos medidores tienen una salida de pulso asociada con el consumo eléctrico, en el caso de este medidor específico, cada vez que se enciende el diodo led frontal, envía un pulso que activa un optoacoplador para la salida de pulsos terminales (11 +) (12 -) y el medidor integrado realiza la medición e integración de kilovatios / hora y enviando pulsos según el consumo siendo la relación de este medidor de 3200 imp «impulsos» / kwh,.
Este medidor tiene 2 características:
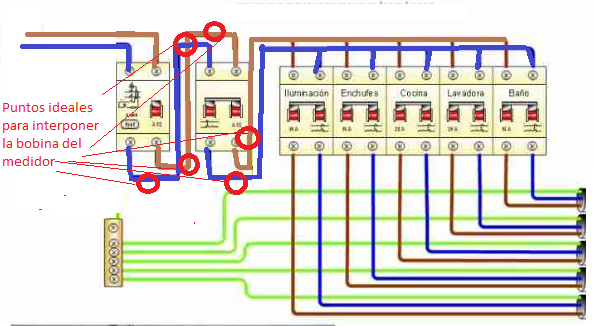
Es invasivo, es decir el circuito debe abrirse para colocar en serie el medidor entre la fuente y la carga
No tiene un protocolo de comunicación en serie, siendo la relación de salida de pulsos de 3200imp / kwh.
Gracias a la ayuda de un microcontrolador «Arduino, ESP8266 o ESP32» podemos medir los watios consumidos. La elección precisamente de un ESP8266 12E o Arduino Nano Clone , de hecho dependerá de si necesitamos enviar los datos o no a un servidor en la nube o simplemente queremos mostrar la información en un display
Como contábamos al principio de este post el modelo DSS66 es algo anticuado por lo que es perfectamente viable usar de contadores con salida de pulso de carril DIN , como la mayoría que se comercializan para fijar en el cuadro de distribución de c.a. cuya velocidad de flash de salida de prueba es de 500 impulsos por kWh ( es decir cada impulso corresponde a un 2W/H)
Durante las primeras pruebas se conectaron el GPIO directamente al medidor,dado que el medidor de mentón tiene su propio optoacoplador, pero por alguna razón cada vez que se genera un pulso, el módulo ESP8266 grababa 2 pulsos, algo que no sucedió con Arduino .
La solución para el problema es aislar la salida del watímetro mediante la adición de un optoacoplador 4n25 y una fuente de alimentación de 5v :de esta manera sólo llegaría un pulso y ademas por seguridad se aislan los circuitos .
Para las primeras pruebas se propone usar un ESP8266 y/o arduino y solo haremos la medición de Active Power, por ejemplo utilizando una bombilla de 45W, para tener una carga fija que represente un «hogar».
Lista de componentes
Medidor monofasico CHINT DDS666 u otro medidor que genere pulsos
ESP8266 12E o Arduino Nano Clone
Fuente de alimentación 5v
Matrix led x4 MAX7912
Protoboard 830 Puntos
Optoacoplador 4n25
Código IDE de Arduino
El código para el módulo ESP8266 por ahora no tiene ninguna rutina de comunicación de envio hacia el Cloud, así que por el momento visualizaremos la potencia con un Matrix led x4 MAX7912 pero se puede usar un display de 7 segmentos o simplemente la salida serie
El medidor solo tiene una salida de pulso,por lo que para realizar el cálculo del consumo eléctrico, capturamos a través de una interrupción en el GPIO 5 (D1), técnicamente utilizando el factor apropiado del medidor 3200imp / kWh = 3.2, se calcula la potencia activa instantánea.
Una diferencia horaria entre pulsos y basada en 1 hora = 3600 s. potencia = (3600000000.0 / (pulseTime – lastTime)) / 3.2
Este cálculo se realiza en la interrupción, solo cada vez que se registra un nuevo pulso.
Inicialmente, gracias a OpenEnegyMonitor, por la documentación, el cálculo se tomó de una de las versiones anteriores de su página
Este es el codigo usado para probar la funcionlidad
La Geeetech prusa i3 Pro W es unos de los modelos de impresora 3d caseras mas conocidas del mercado ( la version «w», se diferencia de las otras por su marco de madera de 6 mm, para dar a la impresora, mas estabilidad a la hora de trabajar con ella ).
El precio de la impresora 3D Geeetech prusa i3 Pro W, es de lo mas económico que se pueden encontrar online ( en Amazon por unos 149€) , en parte motivado porque viene en kit ,lo que implica horas de montaje, y luego hay que calibrarla, lo cual quizás nos pueda desanimar bastante pues puede llevarnos unas 6 horas como mínimo y ademas debemos añadir tiempo extra del proceso de calibración.
En el caso de la Geetech Prusa i3 W el manual viene bastante bien explicado , lo cual podemos ( y debemos complementar con el canal de youtube donde técnicos del propio fabricante explican paso a paso como montarla en una serie de 20 vídeos muy completos, que sin duda nos ayudaran en el montaje).
Antes de profundizar en los problemas de ajustes de esta impresora, lo primero es asegurarnos de que hemos montado correctamente la impresora asegurándonos que todos los tornillos y tuercas están afianzados y no existe holgura ni ninguna parte suelta que nos pueda malograr el funcionamiento del conjunto , así que no es mala idea repasar los 20 pasos que nos propone el fabricante por si hemos omitido algo
En el primer vídeo vemos vemos el montajes de uno de las barras con sus rodamientos para el eje Y (como podrá adivinar tenemos que hacer lo mismo para la segunda barra)
Es importante la colocación de las dos barras sobre el soporte y que este perfectamente paralelas ambas tablillas, por lo que debería tratar de mantener paralelas las varillas de rosca y las cuatro piezas de madera paralelas. El eje Y debe ser un rectángulo, es decir, las varillas en ambos lados deben ser paralelas, por lo que es la placa frontal y trasera. De lo contrario, causará obstrucción para el cinturón más tarde. Puede usar un calibrador digital para medir.
En el siguiente vídeo podemos ver paso a paso el montaje de este conjunto de las cuatro varillas con junto el ensamblaje del motor del eje y:
En este paso veremos como montar la pieza horizontal de grandes dimensiones donde descansara la cama caliente que ademas estará dotada de movilidad.
En realidad este paso es muy sencillo y lo veremos de forma muy parecido en otros pasos similares del montaje
Y ahora toca colocar todas al piezas anteriores junto a la plataforma que albergara la cama caliente
En este paso nos centraremos en los interruptores de fin de carrera ( en esta impresora son 3) . Internamente los usados en esta impresora contiene interruptores normalmente abiertos (NA), de modo que al actuar sobre ellos en la palanquilla abrirán el circuito al que estén conectados
En este video simplemente se monta el tope final en la placa de soporte trasera del eje Y , con un tornillo M2.5 x 16mm, arandela M2.5 y tuerca hexagonal M2.5.
En esta nueva fase simplemente se trata de montar el esqueleto de la impresora
Para alojar los dos motores del eje z, los cuales van a trabajar en paralelo, en este paso vamos a dotar a la estructura anterior de dos pequeños soportes donde irán los otros dos motores :
Ahora para mantener la placa refrigerada ,fije el ventilador en la parte posterior izquierda del bastidor con 4 tornillos M3 x 20, arandela M3 y tuercas M3. Tenga cuidado con la dirección del ventilador pues el lado con la etiqueta debería ir hacia afuera.
Por cierto, el ventilador suministrado hace machismo ruido, por lo que perfectamente es recomendable reemplazarlo por uno similar de otro fabricante cuyo modelo sea menos ruidoso ( por ejemplo sirven los usados para refrigerar las Raspberry Pi que suelen ser de las mismas medidas y mucho menos ruidosos)
En este paso se trata de montar por fin la estructura que soportara la cama caliente al resto de estructura de la impresora
En este paso se trata de montar el interruptor de fin de carrera del eje z ( es decir el eje profundidad o altura), el cual por cierto es uno de los pocos ajustes que podremos hacer gracias a un tornillo de ajuste
Ahora toca montar lso dos motores que se moverán al unisono para mover el eje Z
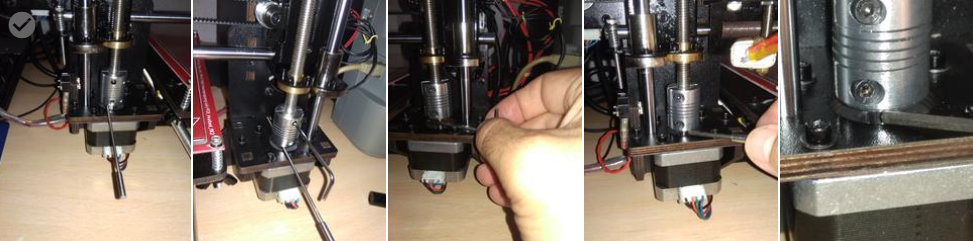
Ahora se trata ahora de añadir a los motores un acoplador o husillo para poder después conectarle un eje en forma de varilla roscada
Los pasos a seguir son los siguientes:
Fijar los dos acoplamientos en ambos del eje del motor.Tenga en cuenta:La apertura de ambos extremos, uno es de 5 mm, otro es de 8 mm, conectar el orificio de 5 mm. al eje del motor.
Atornille firmemente el tornillo de la pieza de 5 mm en la parte superior del lado plano del eje del motor; puede ver el límite en el interior del acoplamiento.
Haga lo mismo con el acoplamiento del eje del motor derecho de acuerdo con los pasos anteriores.
Ahora toca montar el tope final y el gatillo de tope
Montaje del extremo intermedio del eje X
Montaje del carro del extrusor
Ahora se trata de acoplar el resto de ejes X y Z al cuerpo de la Impresora.
Aqui vemos el montaje del soporte superior del eje Z
Ahora toca añadir la correa dentada del eje X
Ya entramos en la parte sencilla de montar el panel de control con el LCD y el lector de tarjetas SD ,el cual por cierto se puede colocar aparte gracias a la longitud de los dos cables de cinta si así lo desea
Una de las ultimas partes es colocar la cama caliente ,la cual nos deberíamos asegurar qeu quede completamente horizontal aunque posteriormente se hará un ajuste mas exhaustivo
La fuente de 12V se coloca en un lateral , siendo lo único complejo no equivocarnos en las conexiones , porque si nos equivocamos si que podemos malograr la impresora, así que tenga un cuidado muy especial en este punto
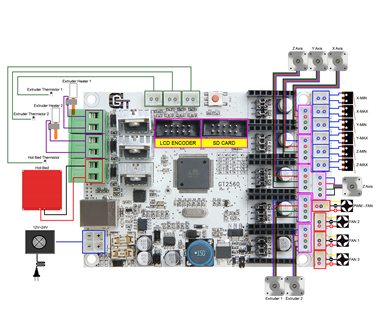
Por ultimo toca fijar la placa de control con todas sus conexiones:
Observe que en la placa lleva 4 zócalos para los drivers de los controladores de los motores paso a paso, los cuales suelen venir ajustados de fabrica .
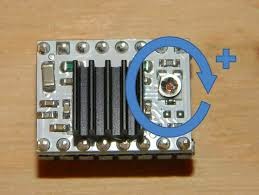
Normalmente los drivers vienen preajustados de fabrica , asi que no es necesario realizar este paso, tanto es que de hecho no deberíamos andar tocando el potenciómetro que tiene el driver del eje Z así sin más ya que hay que hacerlo mientras se mide el voltaje de referencia del driver o mejor, la intensidad que manda al motor. Si se va a girar acerlo con un destornillador no conductor porque se puede destruir el driver.
En caso de tener problemas podríamos probar los drivers uno a uno por separado la intensidad que demanda, la cual debería tener un valor de 0,2A para cada motor, recordando que el driver del eje Z debe de tener 0,4A ya que lleva conectados dos motores en paralelo y sumando la intensidad que demanda la resistencia interna de nuestra placa, esta suele estar entre los 0,04A y 0,1A,
En caso de no estar ajustados dichos drivers ,si tuviésemos problemas para regular la intensidad que pasan por los drivers, localizamos un pequeño tornillo en la placa, se trata de un potenciómetro que podemos regular a mayor o menor resistencia.
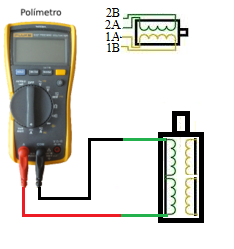
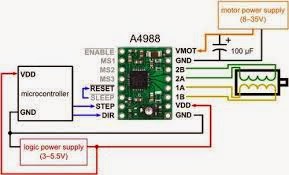
Para saber como conectar el driver a la ramps, debemos fijarnos en la placa donde pone la configuración del bobinado que debemos conectar del motor paso a paso.
Si no conocemos los cables del motor que corresponden a cada bobina del motor podemos comprobar con el polímetro continuidad entre los extremos de los 4 conectores que tiene, también con un Led conectado entre dos de los cuatro cables y girando el eje del motor cuando se encienda tenemos localizados los pares de bobinas.
Una vez tenemos localizadas las dos bobinas del motor bipolar paso a paso conectamos el motor a la ramps donde se une a las patillas correspondiente del driver:
En resumen ,mas abajo vemos el conexionado completo de este modelo . En el esquema general no se conecta los fines de carrera Xmax, Ymax y Zmax pues este modelo no cuenta con ellos
Tampoco se conecta el segundo extrusor y toda la electrónica relacionada ( motor del extrusor , termistor y calentador)
Y por ultimo tenemos un ventilador fijo ( el de refrigeración de la placa) y uno controlado por pulsos para el primer extrusor
Una vez concluido el montaje, antes de intentar la primera impresión, es vital que la impresora esté correctamente calibrada. Si se salta o se apresura este paso, esto puede producir frustración y probablemente ademas podrá tener errores en las impresiones más tarde, así que es importante tomarse el tiempo para asegurarse de que la máquina está correctamente configurada.
Como el proceso de montaje es bastante largo como se puede apreciar en los vídeos anteriores , debemos ser muy ordenados y meticulosos a la hora de ensamblar las diferentes piezas, pues el esfuerzo debería compensar el resultado ya que una vez terminado es una impresora 3d que funciona muy bien.
El Software suministrado por Geetech es el EasyPrint , el cual esta diseñado para impresoras de Geetch ,pero por supuesto , una vez ajustada la impresora, puede usarse el famoso programa Cura de Ultimaker
Para el ajuste de la impresora y primeras pruebas de la Geeetech prusa i3 Pro W , lo idea es usar es el prograna EasyPint pues no va a permitir hacer los primeros ajustes de los motores de lso tres ejes x,y , z de un modo muy cómodo como vamos a ver mas adelante
Cada impresora lógicamente tiene su propio procedimiento de calibración pero hay una lista de puntos clave que deben ser abordados:
El marco es estable y correctamente alineado.
Las varillas están correctamente alineadas
Las correas están tensas.
La rueda motriz gira suavemente
La cama esta nivelada con relación a la trayectoria de la extrusora.
El filamento rueda libremente desde el carrete, sin causar demasiada tensión en el extrusor.
La corriente para motores paso a paso se ajusta al nivel correcto.
Los cables están correctamente conectados
Los acoplamientos y las poleas se fijan firmemente
Los ajustes del firmware son correctos incluyendo: velocidades de movimiento del eje y aceleración; control de temperatura; topes finales; direcciones del motor.
La extrusora se calibra en el firmware con los pasos correctos por mm de filamento.El punto respecto a la velocidad de paso de la extrusora es vital. No puede esperar que la máquina producirá con precisión una cantidad fija de filamento cuando se le indique que lo haga. Demasiado resultará en gotas y otras imperfecciones en la impresión, muy poco resultará en lagunas y la mala adherencia entre capas.
EsasyPrint
EasyPrint 3D es el software de impresión 3D oficial para configurar y tambien para usar la Prusa I3 W Este programa es muy fácil de usar y esta desarrollado por GEEETECH siendo es capaz de convertir un modelo 3D digital en instrucciones de impresión para su impresora 3D gracias a que incluye el modulos de slicing junto con el propio control de la impresora.
Se puede descargar desde el sitio oficial http://www.geeetech.com/forum/viewforum.php?f=43
Estos son los parámetros específicos para la impresora la Prusa I3 W :
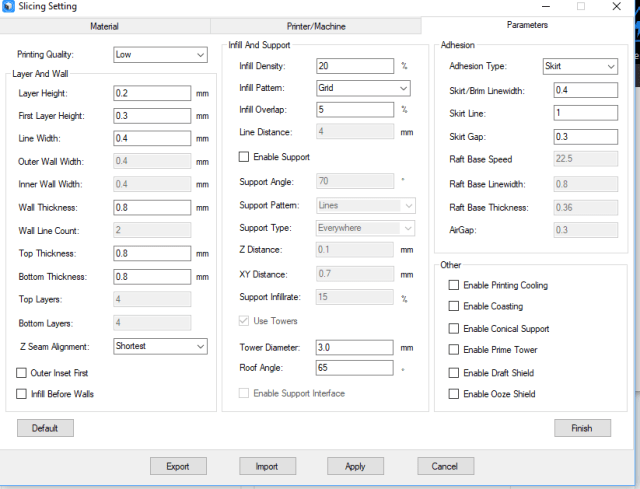
Ademas estos son los parámetros recomendados para la impresión 3d con este modelo
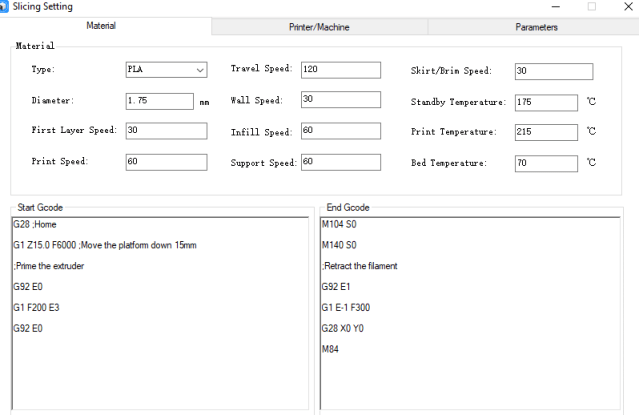
Esta es la configuración recomendada por el fabricante pera el material en el caso de usar PLA ( el cual es que mejores resultados da con esta impresora):
Programa Ultimaker Cura
Al ser la Prusa I3 W una impresora con código libre es posible usar otros programas diferentes tanto para el slicing como a la propia impresión 3D , diferentes del recomendado por el fabricante (EasyPrint ) como por ejemplo el famoso sw de cura, el cual es un programa más elaborado y con idioma español
Puede parece descabellado usar otro sw, pero es fácil percibir con la practica que el sw oficial EasyPrint es lamentablemente un producto en proceso de depuración lo cual normalmente se traduce en muchas piezas mal impresas o que tenemos desechar por interrupciones o cuelgues de propio programa ( aunque ha mejorado bastante en su ultima version este .
Este programa es ligeramente mas complejo que usar el EasyPrint 3D , ahora bien una vez configurado su manejo es también muy sencillo (y todo el interfaz esta traducido en Español a diferencia del EasyPrint3d que esta en chino y en ingles únicamente)
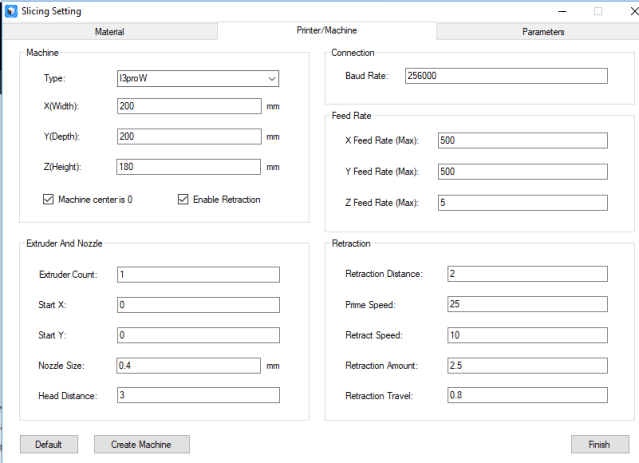
El cura necesita configurarse para este modelo de impresora ya que aparece la Prusa I3 pero no la Prusa I3 W,, por lo que debemos cambiar algunos ajustes que vamos a describir
Para poder realizar la descarga nos piden unas pocas preguntas en ingles pero al responderlas , en pocos segundos estaremos descargando el sw
Una vez instalado el sw , ejecutaremos este y nos iremos a la sección de los ajustes
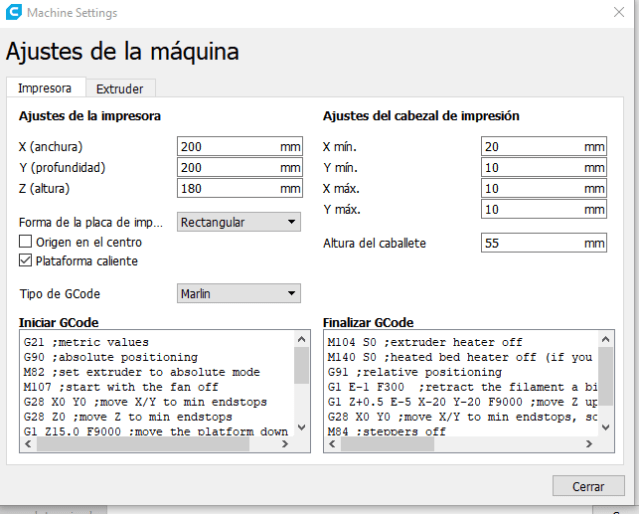
Estos son los ajustes de la impresora Prusa I3 W,:
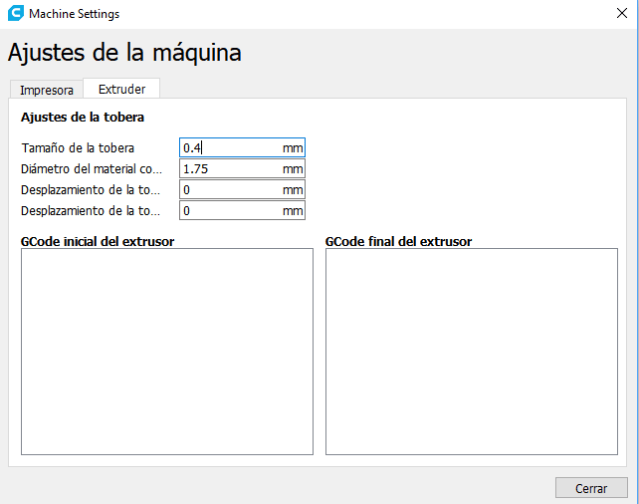
Y estos son los del extrusor:
Usar el programa Cura puede ser una buena idea sobre para las impresiones problemáticas gracias a los soportes ya que no están implementados en el EsayPrint y son decisivos a la hora de imprimir piezas con muchos voladizos o huecas .Ademas la posibilidad de girar las piezas para acomodarlas en la cama caliente y con ello mejorar la sustentación en un determinado plano puede ser determinante a la hora de lograr una pieza bien impresa. Personalmente he impreso piezas que solo lo he logrado llevarlas con éxito cuando las he girado en una determinada posición, labor que es fácilmente realizable con el programa Cura.
No obstante solo una puntualización : no desistale el easyprint aunque le funcione el Cura, ya que aun este programa nos puede ser muy útil para re-calibrar la impresora ,forzar el calentamiento del fusor para eliminar atasques en la boquilla, cambiar de filamento y un largo etcétera, tal y como vamos a ver a continuación.
Primeros Ajustes con EasyPrint 3D
Es relativamente habitual que en el momento de hacer las primeras pruebas con los modelos tipo Prusa, cuando intentamos mover el eje Z ( el eje que mueve en altura la boquilla de impresión ) con el programa de control EasyPrint de Geetech para comprobar su correcto funcionamiento y linealidad , se queden ambos motores «como bloqueados generando vibraciones y ruidos muy intensos que desde luego no son un buen presagio de un buen funcionamiento y que nos deben hacernos percatar de que debemos hacer algunos ajustes
Para ajustar correctamente la impresora 3d ,por tanto, lo recomendable es usar el programas EasyPrint 3D , que es el software de impresión 3D diseñado para los productos Geeetech
Estos son los pasos para su primera configuración :
Una vez finalizada la instalación, encuentre el icono EasyPrint 3D. Haga doble clic en él para iniciar el software.
A continuación, puede elegir el idioma inglés en Config –> Language.( lamentablemente solo esta disponible en idioma ingles o Chino)
Haga clic en el menú Printer (Impresora) y, a continuación, seleccione el puerto COM correspondiente. El puerto COM se refiere al puerto que se puede utilizar para conectar la impresora y su ordenador que es USB que aparece en el administrador de dispositivos.En caso de que no pueda encontrar el puerto COM, asegúrese de que el interruptor de encendido de la impresora está encendido y el cable USB está bien conectado con el ordenador.
Haga clic en el menú Impresora y, a continuación, seleccione el tipo de impresora adecuado: Pro W.
Hacer clic en el botón Conectar situado en la parte superior derecha. Se puede observar el estado en tiempo real de la impresora en la parte inferior de la interfaz de software.
Antes de continuar actualizar tanto la ultima version del EasyPrint desde el menú de Help–>Software Upgrador como el propio firmware de la impresora en el menú de Help–> Firmware Upgrador
Prueba de movimiento de ejes X e Y con EasyPrint 3d
Actualizado todo el software , ahora ya nos podemos ir al menú de Control del programa donde comprobaremos el correcto funcionamiento de los ejex X e Y ,pulsando respectivamente sobre los botones X+ y X- así como Y+ e Y- .
Algunos problemas que nos podemos encontrar:
Si no reacciona en alguno de los dos ejes X o Y , esto puede ser síntoma de estar mal conectados los motores correspondientes a la placa principal , por lo que antes de continuar debería revisar su correcta conexión.
Si no se parasen alguno de los dos motores puede ser sinónimo de mala conexión de los finales de carrera de los ejex X o Y , por lo que es vital estén bien conectados estos . Si duda usted incluso puede probarlos con un polímetro su correcto funcionamiento: al accionar la palanquilla de cada switch debería oírse un «click» y por supuesto cerrar el circuito ( recuerde que las conexiones correctas son las de los extremos ignorando el centro como se ve en la imagen inferior )
Si el movimiento en algunos de los ejes es irregular, debe asegurase de que las correas para ambos ejes están tensadas y correctamente colocadas
AJUSTES EJE Z
Este es uno de lso ejes que mas problemas puede dar precisamente por la falta de alinealidad de las varillas verticales con sus dos respectivos motores que deben moverse en perfecta sincronía
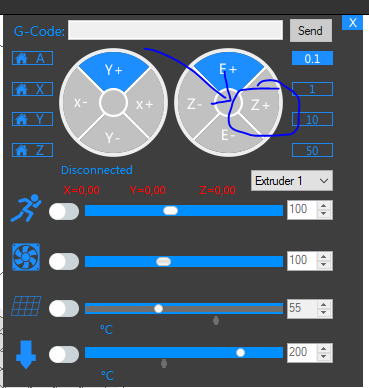
Para ajustar este eje nos iremos al menú de Control del Easy Print para comprobar el correcto funcionamiento deL EJEX Z pulsando respectivamente sobre los botones Z+ y Z- .
Algunos problemas que nos podemos encontrar:
Si no reacciona en alguno de los ejes puede ser síntoma de estar mal conectados los motores correspondientes a cada eje por lo que antes de continuar debería revisar su correcta conexión , asegurándonos sobre todo que los dos motores están en configuración paralela
Si no se paran los motores puede ser sinónimo de mala conexión del final de carrera de los eje z, por lo que es vital que este bien conectado . Si duda, incluso puede probarlos con un polímetro su correcto funcionamiento
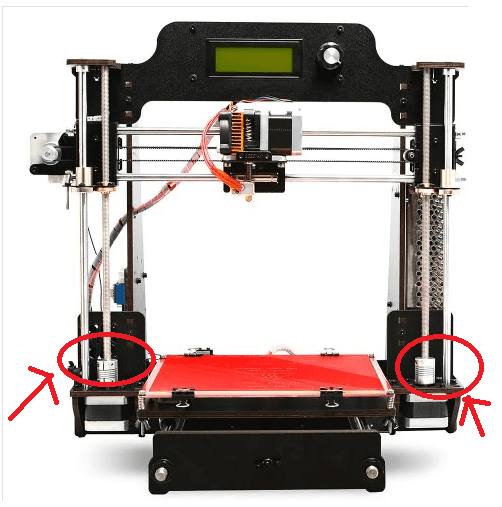
En caso de ruidos ,movimientos imprecisos , falta de fueza , desalinealidad entre las varillas y en general movimiento deficiente del eje z, ese desfase es debido a que uno de los motores está perdiendo pasos respecto al derecho por lo que debería comprobar si el giro del husillo izquierdo va más duro que el derecho.Si es así es posible que no tenga bien alineado el eje Z, por lo que debe tomar como referencia una parte fija de la máquina (el chasis) y medir en cada extremo ( lógicamente deberían medir exactamente igual en ambos lados) . Si aprecia una diferencia,por muy pequeña que sea se puede corregir rotando el motor del eje Z que corresponda con la mano (motores apagados) hasta que consiga que el eje X esté completamente horizontal.
En caso de persistir las vibraciones, deberíamos desmontar los husillos ( la pieza que une el eje de cada motor con la varilla roscada) pues probablemente esta muy por encima del eje del motor impidiendo transmitir toda la potencia a la varilla. Una buena idea para volver a ajustar precisamente los husillo es colocar una galga ( por ejemplo una llave allen pequeña) entre el husillo y el bastidor de modo que esa distancia sea exactamente en los dos motores y luego asegurar que la muesca del motor esta justo debajo del tornillo pequeño alen y luego apretar todos los demas . Una vez ajustados los husillos como posible que no tenga bien alineado el eje Z debe volver a tomar como referencia una parte fija de la máquina (el chasis) y medir en cada extremo ( lógicamente deberían medir exactamente igual en ambos lados) . Si aprecia una diferencia, se puede corregir rotando el motor del eje Z que corresponda con la mano (motores apagados) hasta que consiga que el eje X esté completamente horizontal.
Si todo lo anterior falla y seguimos teniendo vibraciones pruebe a desconectar las varillas y mueva los motores en solitario: así puede analizar mejor el movimiento y el sentido de giro ( incluso también podría probar también a intercambiar la conexión en la ramps).;
RESUMEN
Lo primero al abrir la caja te das cuenta lo bien que lo tiene todo pensado Geeetech para esta impresora. Se trata de un Kit de montaje donde montas la impresora absolutamente desde 0, con todas las piezas por separado, la infinidad de tornillos, la placa, cables, partes metálicas, herramientas y un largo etcétera. Todo embolsado y con un número en cada bolsa con una lista donde dice de que se trata cada número, una cosa muy buena sobretodo por los tornillos al haber tantas medidas diferentes. A la hora de montarla, yo con cierta experiencia tardé unas 4 horas aprox.. lo mejor de todo es seguir el vídeo que tienen en Youtube ya que lo hacen paso a paso, te dicen que tornillos usar y demás..
Sorprende mucho que pese a sera una DIY tiene cosas muy muy buenas, como unos tensores de correas, un ajustador para el tope de Z, una placa GT 2560 con drivers intercambiables para poder montar unos 2208 y hacerla silenciosa, unas piezas para la cama y el carro para agarrar la correa bien y sin necesidad de bridas. Todo eso son mejoras que por ejemplo que una A8 no tiene y es de agradecer, ya que facilita mucho la vida a la hora de montarla.
Lo del marco de madera del modelo analizado (Geeetech prusa i3 Pro W)no es ningún problema porque realmente el resultado es bastante robusto .Ahora bien, el montaje no es tan trivial como cuenta el fabricante . Afortunadamente con los vídeos y el manual del propio fabricante se puede solucionar bien, aunque hay que andar con mucho cuidado por el tema de la construcción simétrica ( nada que no se pueda arreglar desarmando y poner al otro lado). La instalación eléctrica, lleva su rato, pero se consigue.
No debemos olvidar la instalación de driver, software y demás… que no tiene nada que ver con «instalar y darle a imprimir».
Y una vez con todo listo esta, el tema de los primeros ajustes , tema que es especialmente importante si queremos obtener resultados aceptables, por lo que en este post hemos querido centrarnos en posibles problemas de ruidos o mal funcionamiento y como corregirlos.
Resumidamente pues este tipo de impresora tipo Prusa , son bastante compactas, se montan sin demasiada complicidad y con un buen ajuste del eje X (que esté calibrado) y otro buen ajuste de la cama, son fáciles ponerlas a imprimir. Ademas desde la pantalla además vemos que tiene un Firmware personalizado donde podemos tocar diferentes opciones como aceleraciones, jerk y demás, que son cosas avanzadas pero que se agradecen cuando vayamos aprendiendo.
! Esperamos que con estas ideas amigo lector hayamos intentado ayudar algo en caso de que se haya encontrado con este tipo de problemas y este post le haya resultado útil !





Debe estar conectado para enviar un comentario.