Las televisiones LCD más antiguas, aunque todavía funcionales, presentan dos inconvenientes comunes: el consumo fantasma y una mayor propensión a averías en su fuente de alimentación debido al calor como vimos en un post antiguo. A continuación, te proponemos dos sencillas modificaciones para alargar la vida de tu televisor y reducir tu factura eléctrica.
1. Interruptor general: La solución definitiva al consumo fantasma
El consumo fantasma se produce porque muchos aparatos, incluso apagados, siguen consumiendo energía si permanecen enchufados. Esto se debe, en parte, a los transformadores que adaptan el voltaje, cuya bobina primaria sigue conectada a la red, generando un consumo por su resistencia. Indicadores luminosos o pequeños relojes también contribuyen a este gasto .
La forma más efectiva de eliminar este consumo es desconectar completamente el televisor de la red eléctrica cuando no esté en uso.
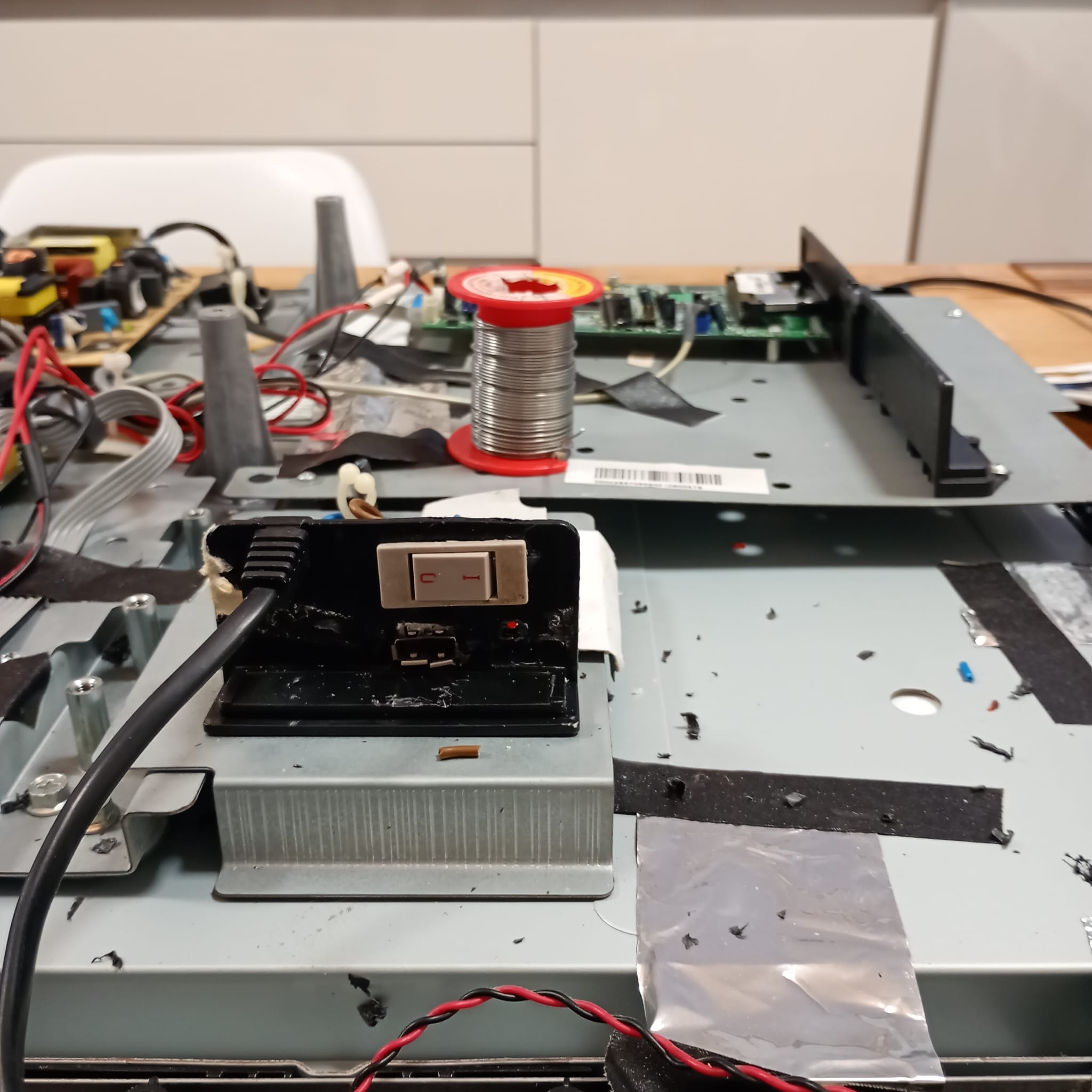
La solución como veremos en la imagen es bastante sencilla pues simplemente habrá que interconectar un interruptor entre el cable de alimentación de la TV . El interruptor puede ser reciclado pero dimensionado a una potencia adecuada al consumo del TV ( de uno a dos amperios).
En el caso de la OKi lo ideal es colocarlo justo en el pasante del cable de alimentación para hacerlo mínimamente intrusivo y ahorrar cableado.
3.La fuente de alimentación
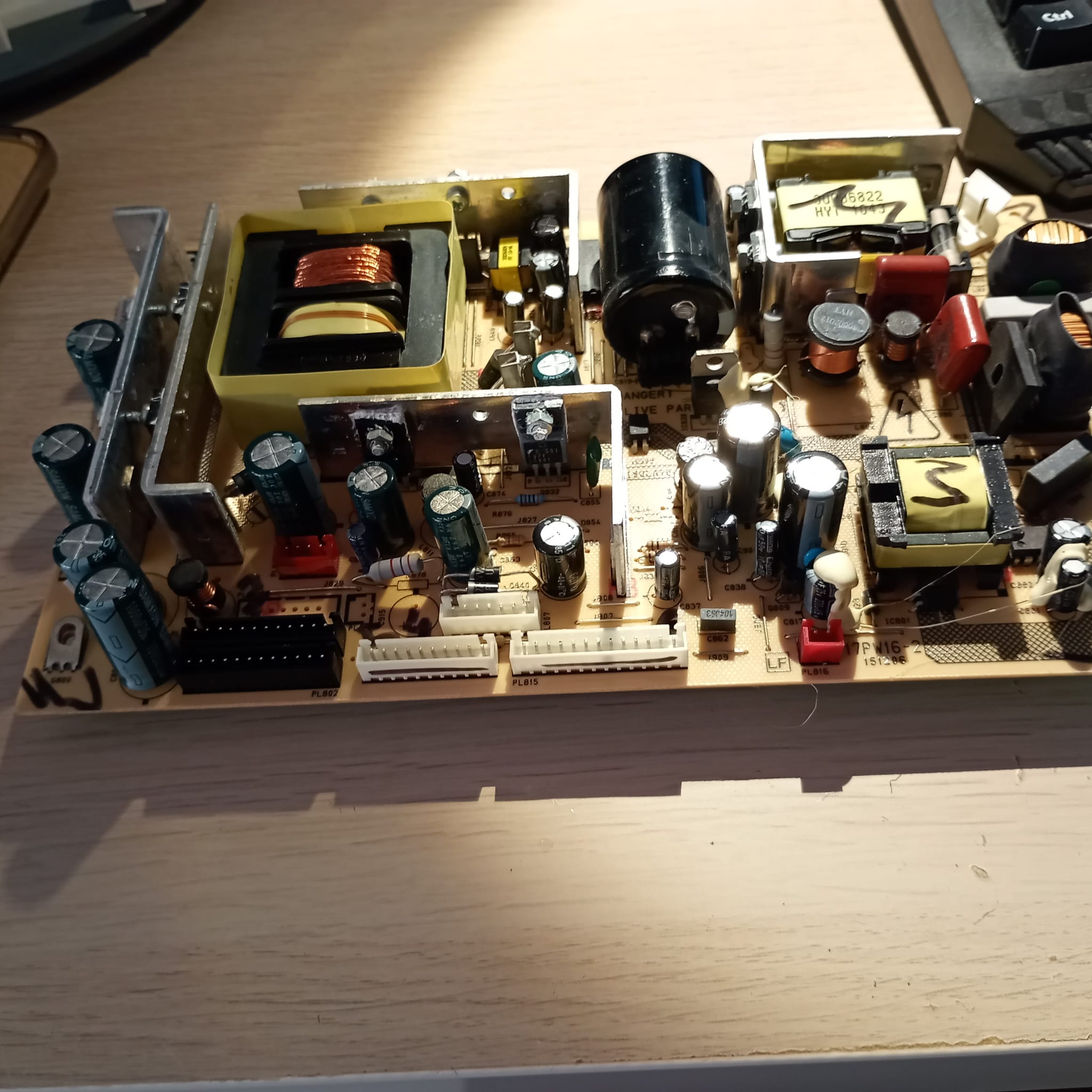
La placa 17PW16-2 producida por Vestel es una fuente de alimentación utilizada en televisores LCD , y presenta averías comunes en este tipo de aparatos. Esta fuente de alimentación se utiliza en una variedad de modelos de televisores de diferentes marcas.A lgunos de los televisores compatibles con esta fuente son:
- Acoustic Solutions
- LCD42762HDF
- LCD42805HDF
- Basic Line
- BL40TDT
- BL42720HDTDT
- Bluesky
- Hitachi
- L42VP01U
- También se mencionan los modelos 32LD6600B y 32LD8700UA en el contexto de kits de reparación que incluyen la 17PW16-2, aunque el kit es para varias fuentes Vestel2.
- Oki
- V40A-PHS
- Sanyo
- CE42FD81-C
- Technika
- LCD42-207
- Tevion
- MD30180A
- Waltham
- WL427B
- Wharfedale
- LCD37F1080P
- LCD42F1080P
Otros modelos mencionados en el contexto de kits de reparación que cubren la 17PW16-2 y otras fuentes Vestel son:
- Bush IDLCD27
- Dual DLCD3221
- Medion MD20099S
A continuación, se detallan algunas de las averia típicas que podrías encontrar en un TV cuya fuente no va del todo bien:
Síntomas comunes de una fuente de alimentación 17PW16-2 defectuosa en un TV:
- El televisor no enciende: Puede que no haya ninguna señal de encendido, ni siquiera el piloto rojo de standby.
- El televisor tarda en encender o se apaga solo: Si el televisor demora mucho en encender o se apaga de forma inesperada, podría ser un problema de la fuente.
- Problemas de imagen o sonido:
- Pantalla negra o con destellos, pero con sonido.
- La pantalla se ilumina un momento y luego se apaga, aunque se escuche el audio.
- Ausencia total de imagen y sonido.
- Interferencias en la imagen o el sonido.
- Olores extraños o humo: Un olor a quemado es un indicio grave de un componente dañado en la fuente.
Causas y componentes específicos que suelen fallar:
- Condensadores dañados: Es una de las causas más comunes. Los condensadores pueden estar hinchados, con fugas o incluso haber estallado1. En un vídeo de reparación de una fuente similar, se encontró un condensador estallado en el circuito PFC (Corrector del Factor de Potencia) del primario.
- Fusible fundido: Un fusible quemado indica un problema mayor que causó una sobrecorriente14.
- Resistencias dañadas: En el mismo caso del vídeo, una resistencia de bajo valor (0.39 ohmios) asociada al circuito del condensador dañado también estaba cortada1.
- Diodos rectificadores o puente rectificador: Estos componentes pueden fallar, impidiendo la correcta conversión de la corriente alterna a continua.
- Transistores (especialmente MOSFETs): Pueden entrar en cortocircuito o abrirse. Aunque en un caso documentado el MOSFET sospechoso estaba bien, es un componente a revisar cuando hay fallos en el primario de la fuente.
- Problemas en el circuito de standby: Algunas fuentes presentan tensiones específicas en modo standby (por ejemplo, 7V) que cambian al encender el televisor (por ejemplo, a 13V). Fallos en esta sección pueden impedir el arranque.
- Sobrecalentamiento: Una ventilación deficiente o la acumulación de suciedad pueden provocar el fallo prematuro de los componentes.
- Fluctuaciones en el suministro de voltaje: Picos de tensión o una red eléctrica inestable pueden dañar la fuente.
- Cortocircuitos en componentes electrónicos.
- Fallos en reguladores de voltaje.
Importancia de la fuente en averías de TV:
Es relevante destacar que un alto porcentaje de las averías en televisores que montan fuentes de alimentación del tipo Vestel (como la serie 17PWxx) son producidas por la propia fuente de alimentación.
Para diagnosticar correctamente, se suelen medir voltajes en los conectores de la fuente y verificar la continuidad de componentes como los fusibles. Si se detectan componentes defectuosos, se deben reemplazar por unos de las mismas características y capacidad.
2. Refrigeración activa para la fuente de alimentación: Protege el corazón de tu TV
La fuente de alimentación es un componente crítico y, en las TV LCD antiguas, tiende a generar bastante calor. Este calor acelera el deterioro de sus componentes internos, como los condensadores, aumentando el riesgo de fallos prematuros. Una refrigeración activa puede marcar la diferencia.
Implementación de la ventilación:
- El ventilador: Un ventilador de PC, idealmente de 120 mm por su buen flujo de aire y bajo nivel de ruido, es una excelente opción . Puedes encontrar modelos que funcionan a 12V o a 5V . Presta atención a la flecha indicadora en el ventilador, que muestra la dirección del flujo de aire, para asegurar una correcta extracción del calor .
- Ubicación: Coloca el ventilador estratégicamente sobre la carcasa del televisor, justo encima de la zona donde se ubica la fuente de alimentación interna. El objetivo es extraer el aire caliente de esta área. Es importante asegurar que haya espacio para que el aire circule correctamente y no simplemente colocar el ventilador tapando las rejillas de ventilación existentes sin permitir una salida efectiva del aire. Obviamente en nuestro caso tenderemos que practicar la abertura correspondiente en la cubierta trasera del tV siendo lo mas sencillo un soldador o algo similar.
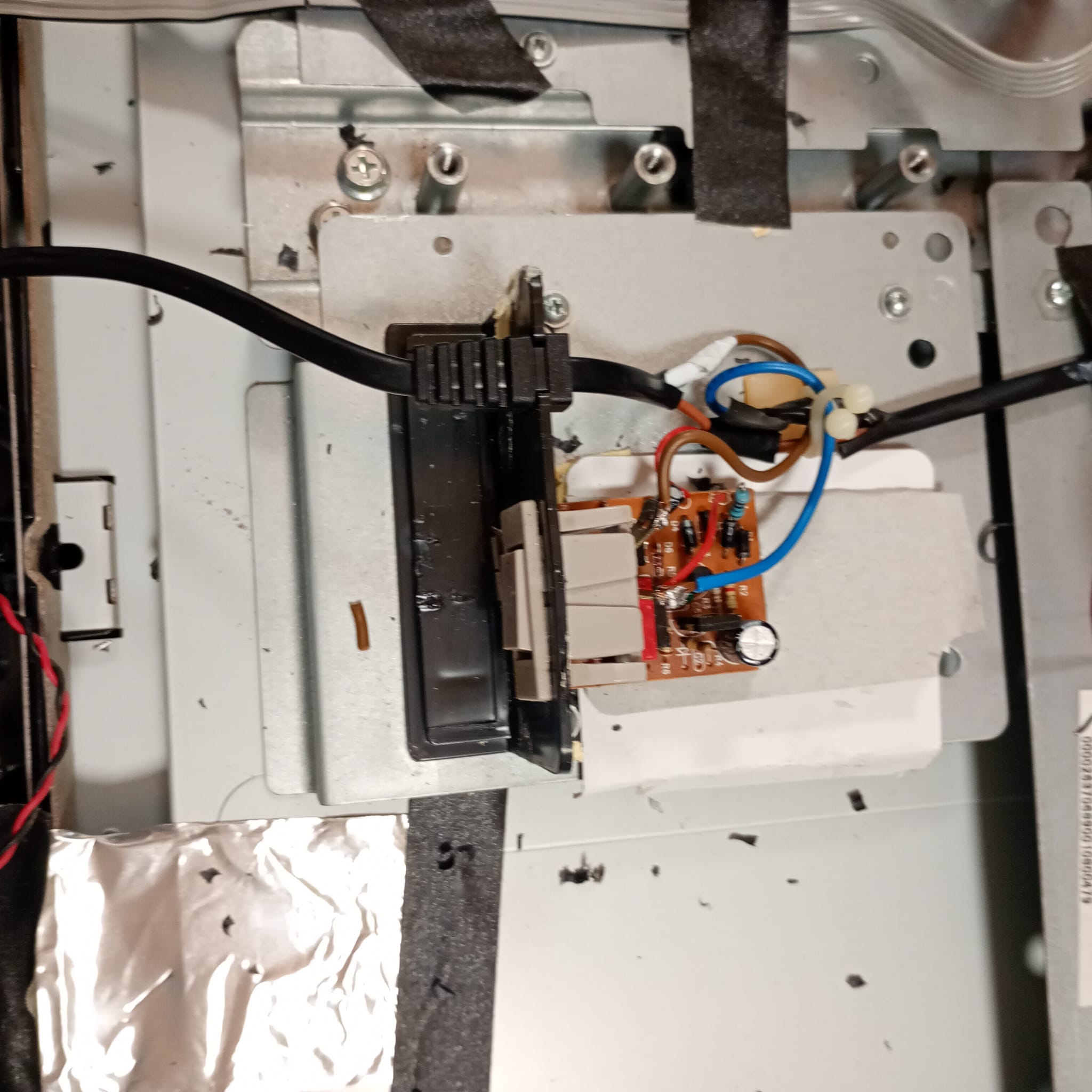
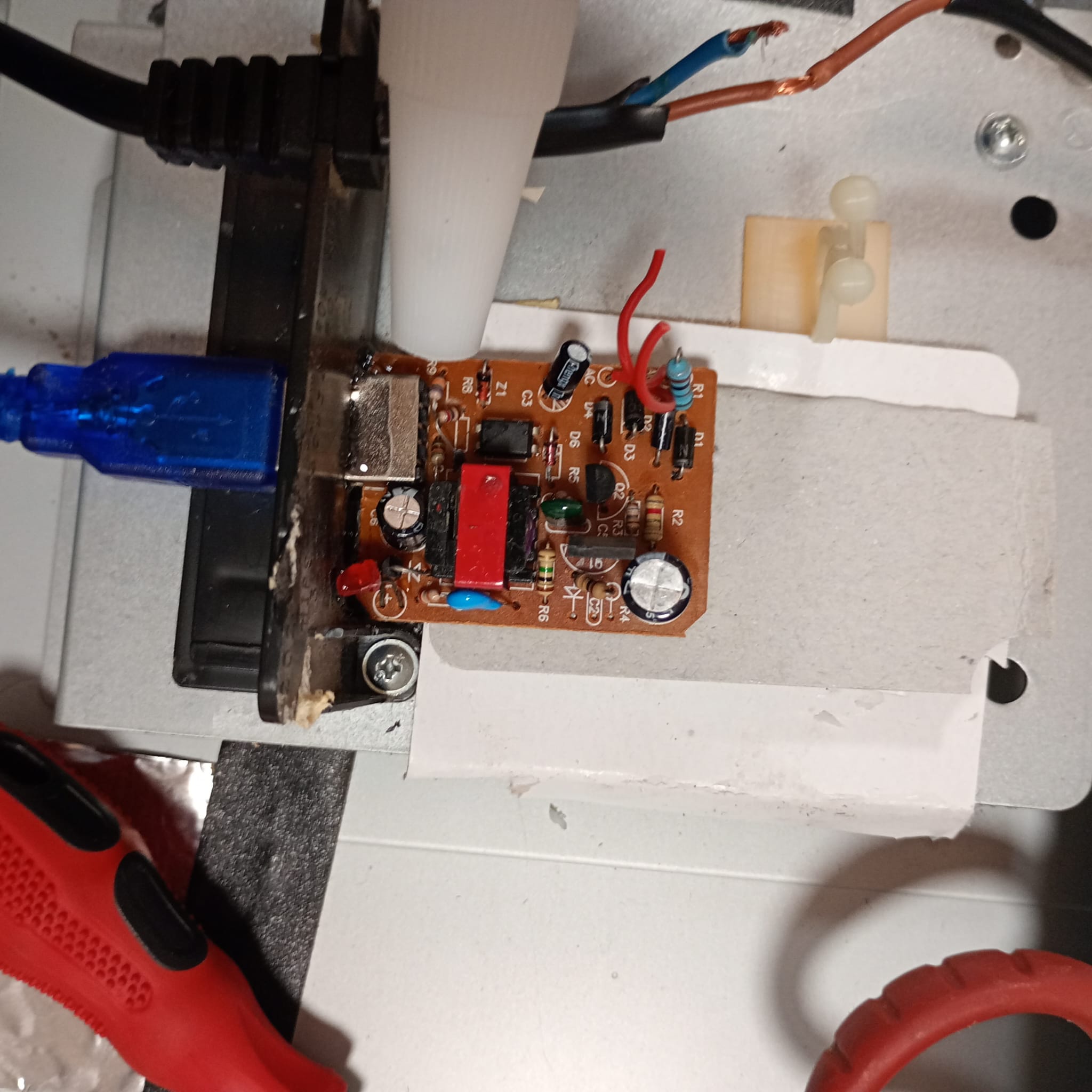
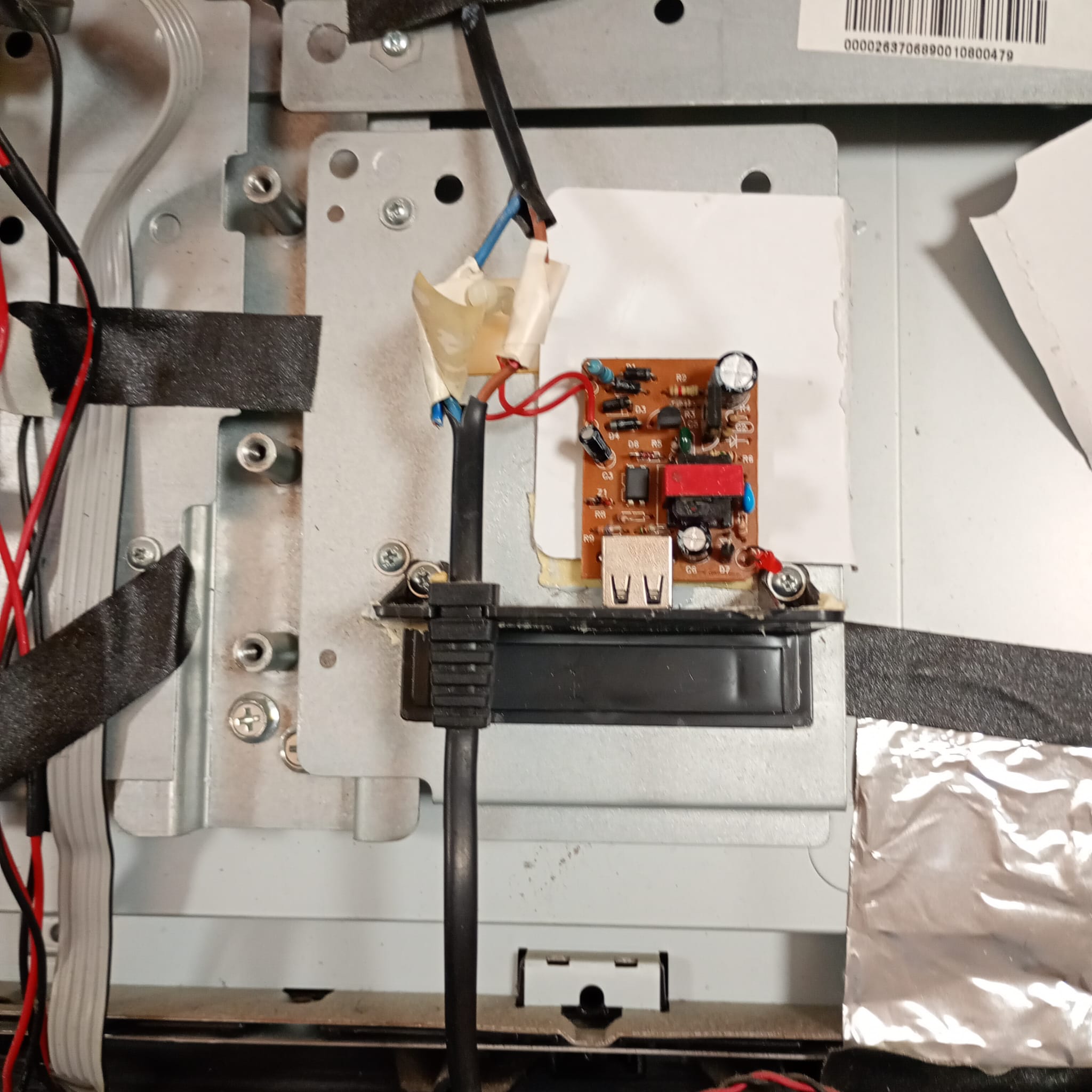
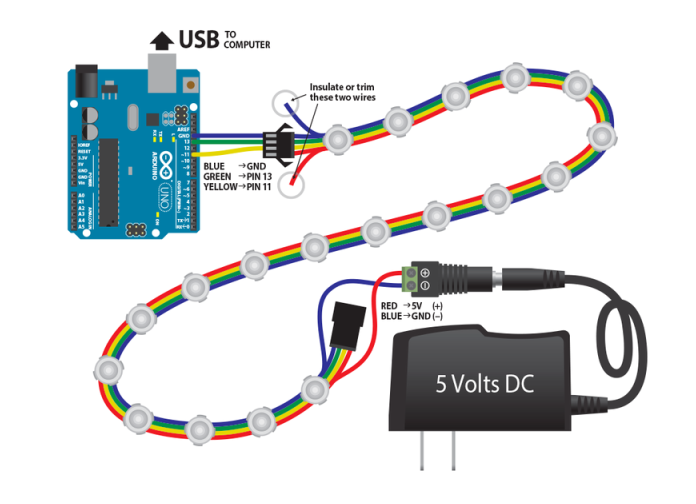
- Alimentación independiente con una fuente USB: Para no sobrecargar la fuente interna del televisor ni depender de que este esté encendido para refrigerar (por ejemplo, después de un uso intensivo), es ideal alimentar el ventilador con una fuente de alimentación USB externa y pequeña, como un cargador de móvil antiguo.
- Si usas un ventilador de 5V: Puedes conectarlo directamente a la fuente USB. Muchos «cooler USB para TV box» funcionan con este principio y son dispositivos compactos y silenciosos.
- Si usas un ventilador de PC de 12V:
- Puedes conectarlo a los 5V de la fuente USB (cables rojo y negro del ventilador a los correspondientes del cable USB) 8. El ventilador funcionará a menor velocidad pero puede ser suficiente y además será mucho mas silencioso manteniendo además un nivel de refrigeración adecuada teniendo sobre todo en cuenta que este tipo de fuentes estan diseñadas para funcionar con refrigeración pasiva.
- Para obtener los 12V completos, necesitarías un pequeño convertidor elevador (boost converter) que transforme los 5V del USB a 12V. Esto asegurará el rendimiento óptimo del ventilador, aunque el conjunto consumirá un poco más de corriente del puerto USB y bajo mi opinión no es necesario por el argumento expuesto anteriormente (de que este tipo de fuentes estan diseñadas para funcionar con refrigeración pasiva).
Ventajas de la refrigeración activa:
- Prolonga la vida útil: Al mantener la fuente de alimentación más fresca, se reduce el estrés térmico sobre sus componentes.
- Mayor estabilidad: Evita el sobrecalentamiento que puede causar fallos o reinicios inesperados del televisor .
Implementando estas dos sencillas mejoras, no solo reducirás el consumo energético de tu vieja TV LCD, sino que también aumentarás significativamente sus posibilidades de seguir funcionando correctamente durante más tiempo, protegiendo uno de sus elementos más sensibles al calor y al desgaste continuo .
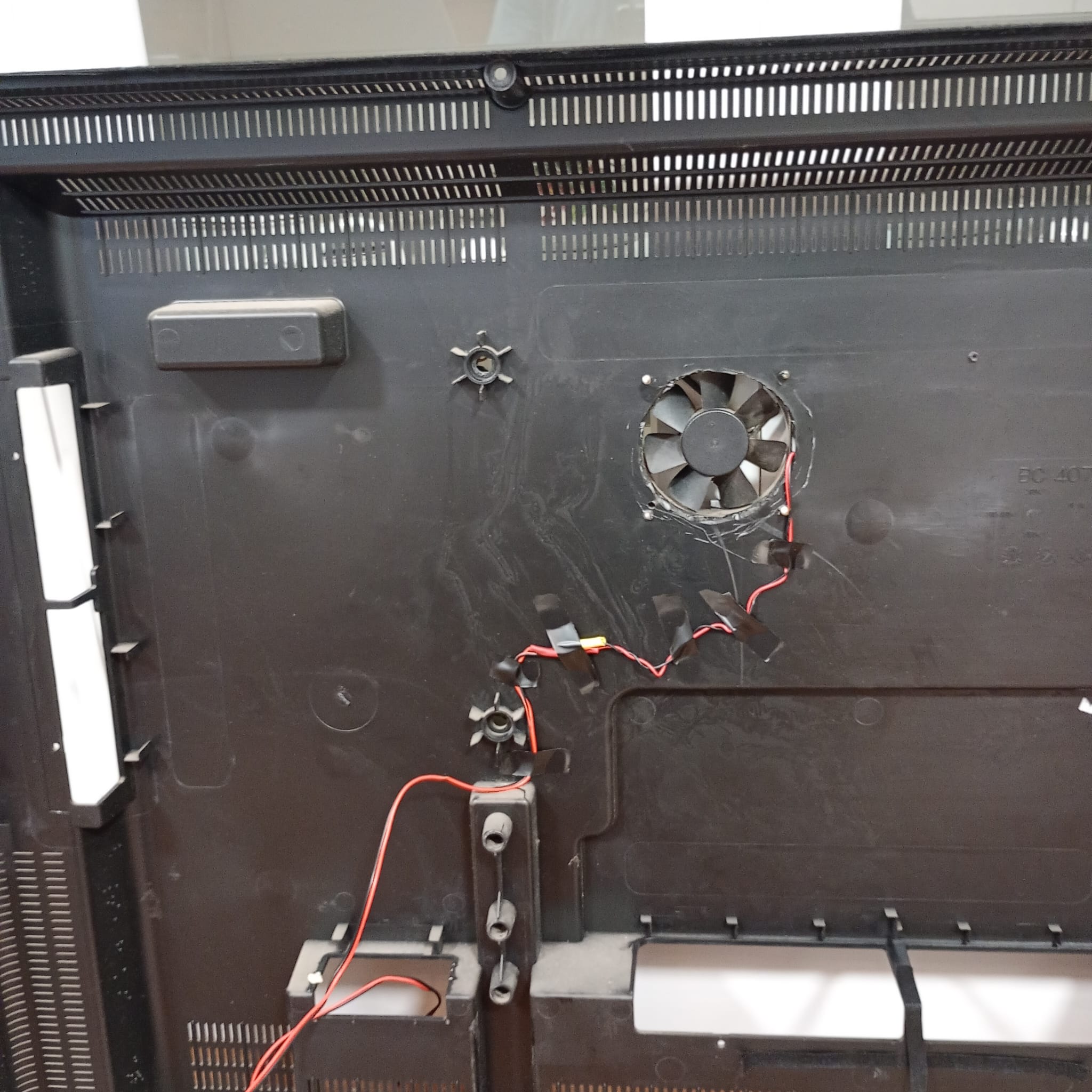
Por detrás obviamente nos aseguraremos que no estorbe el cable del ventilador




Debe estar conectado para enviar un comentario.