Orange Pi PC es una placa de desarrollo de bajo presupuesto creado por Shenzhen Xunlong Software Co
Como es un proyecto Opensource , como tal usted tendrá acceso a la placa PCB y al esquema accediendo a http://orangepi.org
Para ponerla en marcha necesitara también:
- Adaptador de energía 5V/2A
- Tarjeta microSD (puede usar una de 8 GB clase 4, pero si tiene una mejor/mayor tarjeta SD, no dude en usarla).
- Cable HDMI
- Un teclado USB (ratón opcional pero recomendado si se va usar la GUI).Lo ideal no obstante es un combo ratón/teclado inalámbrico por su bajo precio
- Un ordenador Linux o Windows
Por lo tanto, vamos a empezar!
A pesar de que en principio puede parecer que Raspbian solo funciona con Raspeberry Pi , lo cierto es que tambiénexisten imagenes de Raspbian para las tarjetas clonicas de la Raspberry Pi como son la Orange Pi y Banana Pi
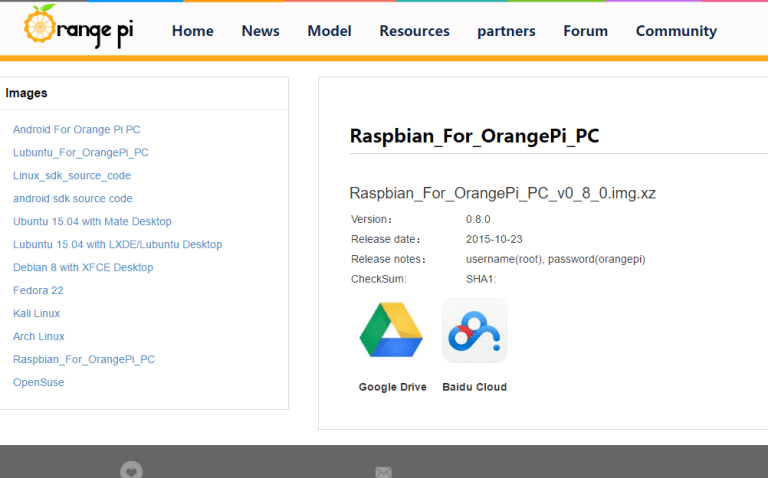
Primero de todo es pues obtener la imagen del sistema operativo.La imagen de 14.04 Lubuntu es muy popular y se puede descargar desde la Página oficial y de la Página loboris (loboris es un desarrollador de naranja Pi comunidad altamente involucrados en la preparación de imágenes de sistema operativo para tarjetas naranja Pi), pero para nuestros popósitos ,debemos instalar Raspbian.
Para crearse una nueva imagen con esa distribución, e instalar Raspbian en su Orange Pi PC por favor vaya a esta url ( es el enlace oficial)
El enlace anterior es valido tanto para una Orange Pi PC como par Orange Pi One, pero también existen versiones de Raspbian para Orange Pi Plus2 o la Orange Pi Plus y otras para la Orange Pi2 ( en este link encontrara los enlaces oficiales)
Una vez descargada la imagen correspondiente en su ordenador y siga los siguientes pasos:
Descomprima la imagen con el programa 7-zip ( probablemente con descompresores como winzip o winrar le darán algún tipo de error al intentar descomprimir el fichero , cuando en realidad es un fichero correcto)
- Inserte su tarjeta del TF en su ordenador. El tamaño de TF debería ser mayor que el tamaño de la imagen del sistema operativo, generalmente de 8 GB o superior.
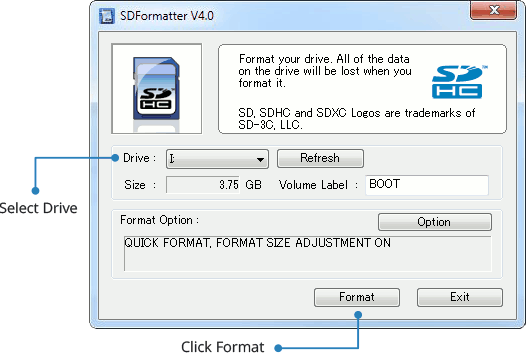
- Formatear la tarjeta del TF.
- Descargar una herramienta de formato de tarjeta de TF como formateador de TF
https://www.sdcard.org/downloads/formatter_4/eula_windows/ - Descomprimir el archivo descargado y ejecute el archivo setup.exe para instalar la herramienta en su máquina.
- En el menú “Opciones”, ajuste la opción “Tipo de formato” para RAPIDA, opción “AJUSTE FORMATO TAMAÑO” en “ON”.


- Compruebe que la tarjeta TF insertó corresponde al seleccionado por la herramienta.
- Haga clic en el botón “Formato”.
- Descargar una herramienta de formato de tarjeta de TF como formateador de TF
- Descargar la imagen del sistema operativo desde la página web de Descargas .
- Descomprimir el archivo de descarga para obtener la imagen del sistema operativo (OS androide imagen excluir, imagen del sistema operativo del androide necesita el otro modo de grabación.).
- Haga clic derecho sobre el archivo y seleccione “Extraer todo”.
- Escribir el archivo de imagen en la tarjeta del TF para lo que puede seguir los siguientes pasos:
- Descargar una herramienta que pueda escribir imágenes en una tarjeta del TF, tales como Win32 Diskimager de sourceforge: http://sourceforge.net/projects/win32diskimager/files/Archive/
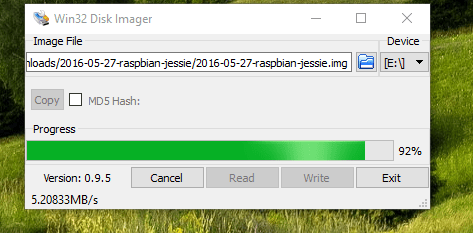
- Ejecute Win32 Diskimager como administrador
- Abra el archivo de imagen descomprimida en el paso anterior.Tenga especial atención en el apartado Device pues esa es la unidad donde esta al microsd y obviamente sera sobreescrita con el nuevo contenido.

- Haga clic en el botón “Write” y espere varios minutos hasta completar con éxito.
5. Debe dar un mensaje de finalización ( Done) en la propia pantalla del interfaz en la parte inferior ,así como en una ventana emergente:
Ahora la opción es instalar myDevices Cayenne en su Raspberry Pi, usando el Terminal en su Orange Pi o bien por SSH.
Ejecute tan sólo los dos siguientes comandos:
La salida será parecida a la siguiente:
login as: root [email protected]'s password: Access denied [email protected]'s password: Linux orangepi 3.4.39 #41 SMP PREEMPT Sun Jun 21 13:09:26 HKT 2015 armv7l The programs included with the Debian GNU/Linux system are free software; the exact distribution terms for each program are described in the individual files in /usr/share/doc/*/copyright. Debian GNU/Linux comes with ABSOLUTELY NO WARRANTY, to the extent permitted by applicable law. Last login: Sat May 2 09:19:09 2015 root@orangepi:~# wget https://cayenne.mydevices.com/dl/rpi_f0p65dl4fs.sh --2016-12-11 21:05:24-- https://cayenne.mydevices.com/dl/rpi_f0p65dl4fs.sh Resolving cayenne.mydevices.com (cayenne.mydevices.com)... 54.165.204.191, 52.45 .49.188 Connecting to cayenne.mydevices.com (cayenne.mydevices.com)|54.165.204.191|:443. .. connected. HTTP request sent, awaiting response... 200 OK Length: 1294 (1.3K) [application/x-sh] Saving to: `rpi_f0p65dl4fs.sh' 100%[======================================>] 1,294 --.-K/s in 0s 2016-12-11 21:05:27 (3.29 MB/s) - `rpi_f0p65dl4fs.sh' saved [1294/1294] root@orangepi:~#
- SEGUNDO COMANDO:
sudo bash rpi_f0p65dl4fs.sh -v
La salida del comando será parecida a la siguiente:
ERRORES EN LA INSTALACIÓN DEL AGENTE:
Si ha actualizado según el post Raspbian probablemente obtendrá un error de falta de espacio absurdo ( en el ejemplo se uso uan SD de 16GB) así que lo mejor es que vuelva a crear la imagen de Raspbian , NO actualice la imagen del SO y vuelva a intentar la instalación del agente
Ejemplo de intento de instalación con error :
root@orangepi:~# ^C root@orangepi:~# sudo bash rpi_f0p65dl4fs.sh -v rpi_f0p65dl4fs.sh continuing as new install... --2016-12-11 13:47:14-- http://updates.mydevices.com/raspberry/myDevices-1.0.tar.gz Resolving updates.mydevices.com (updates.mydevices.com)... 54.148.225.117 Connecting to updates.mydevices.com (updates.mydevices.com)|54.148.225.117|:80... connected. HTTP request sent, awaiting response... 200 OK Length: 9804435 (9.3M) [application/x-gzip] Saving to: `/root/myDevices-1.0.tar.gz' 100%[======================================>] 9,804,435 2.20M/s in 5.8s 2016-12-11 13:47:20 (1.62 MB/s) - `/root/myDevices-1.0.tar.gz' saved [9804435/9804435] ./myDevices-1.0/ ./myDevices-1.0/stg_network.ini ./myDevices-1.0/scripts/ ./myDevices-1.0/scripts/tightvncsetup.sh ./myDevices-1.0/scripts/webiopisetup.sh ./myDevices-1.0/scripts/config.sh ./myDevices-1.0/dev_network.ini ./myDevices-1.0/package ./myDevices-1.0/deb/ ./myDevices-1.0/deb/python3-setuptools/ ./myDevices-1.0/deb/python3-setuptools/python3-setuptools_0.6.24-1_all.deb ./myDevices-1.0/deb/python3-setuptools/python3-pkg-resources_0.6.24-1_all.deb ./myDevices-1.0/deb/python3-setuptools/install ./myDevices-1.0/deb/libiw-dev/ ./myDevices-1.0/deb/libiw-dev/libiw-dev_30~pre9-8_armhf.deb ./myDevices-1.0/deb/libiw-dev/install ./myDevices-1.0/deb/package ./myDevices-1.0/deb/debian_dependencies.txt ./myDevices-1.0/deb/tightvncserver/ ./myDevices-1.0/deb/tightvncserver/tightvncserver_1.3.9-6.6_armhf.deb ./myDevices-1.0/deb/tightvncserver/xfonts-base_1.0.4+nmu1_all.deb ./myDevices-1.0/deb/tightvncserver/libjpeg62-turbo_1.4.1-2_armhf.deb ./myDevices-1.0/deb/tightvncserver/expect_5.45-2_armhf.deb ./myDevices-1.0/deb/tightvncserver/install ./myDevices-1.0/deb/libaxis2c0/ ./myDevices-1.0/deb/libaxis2c0/libaxis2c0_1.6.0-6_armhf.deb ./myDevices-1.0/deb/libaxis2c0/install ./myDevices-1.0/deb/download.sh ./myDevices-1.0/deb/install ./myDevices-1.0/deb/install_packages.sh ./myDevices-1.0/crontab.sh ./myDevices-1.0/preprod_network.ini ./myDevices-1.0/3rd_party/ ./myDevices-1.0/3rd_party/jsonpickle-0.9.2.tar.gz ./myDevices-1.0/3rd_party/requests.tar.gz ./myDevices-1.0/3rd_party/package ./myDevices-1.0/3rd_party/psutil-0.5.0.tar.gz ./myDevices-1.0/3rd_party/iwlib-1.5.tar.gz ./myDevices-1.0/3rd_party/netifaces-0.10.4.tar.gz ./myDevices-1.0/3rd_party/install ./myDevices-1.0/3rd_party/enum34-1.0.4.tar.gz ./myDevices-1.0/3rd_party/install_packages.sh ./myDevices-1.0/uninstall.sh ./myDevices-1.0/reboot_install.sh ./myDevices-1.0/python.tar.gz ./myDevices-1.0/addCron.sh ./myDevices-1.0/setup.sh ./myDevices-1.0/libs/ ./myDevices-1.0/libs/libSystemInformation.so ./myDevices-1.0/libs/axis2/ ./myDevices-1.0/libs/axis2/axis2.xml ./myDevices-1.0/libs/axis2/lib/ ./myDevices-1.0/libs/axis2/lib/libaxis2_http_sender.so ./myDevices-1.0/libs/axis2/lib/libaxis2_mod_addr.so ./myDevices-1.0/libs/axis2/lib/libaxis2_http_receiver.so ./myDevices-1.0/libs/axis2/SARSclientChain.pem ./myDevices-1.0/libs/axis2/modules/ ./myDevices-1.0/libs/axis2/modules/addressing/ ./myDevices-1.0/libs/axis2/modules/addressing/libaxis2_mod_addr.so ./myDevices-1.0/libs/axis2/modules/addressing/module.xml ./myDevices-1.0/libs/axis2/modules/logging/ ./myDevices-1.0/libs/axis2/modules/logging/libaxis2_mod_log.so ./myDevices-1.0/libs/axis2/modules/logging/module.xml ./myDevices-1.0/libs/axis2/SARSserverCert.pem ./myDevices-1.0/libs/libMYOPX.so ./myDevices-1.0/live_network.ini ./myDevices-1.0/python/ ./myDevices-1.0/python/myDevices.service ./myDevices-1.0/python/myDevices.init.sh ./myDevices-1.0/python/myDevices/ ./myDevices-1.0/python/myDevices/ipgetter/ ./myDevices-1.0/python/myDevices/ipgetter/__init__.py ./myDevices-1.0/python/myDevices/wifi/ ./myDevices-1.0/python/myDevices/wifi/WirelessLib.py ./myDevices-1.0/python/myDevices/wifi/WifiManager.py ./myDevices-1.0/python/myDevices/wifi/wifisetup.py ./myDevices-1.0/python/myDevices/wifi/__init__.py ./myDevices-1.0/python/myDevices/os/ ./myDevices-1.0/python/myDevices/os/daemon.py ./myDevices-1.0/python/myDevices/os/cpu.py ./myDevices-1.0/python/myDevices/os/systeminfo.py ./myDevices-1.0/python/myDevices/os/__init__.py ./myDevices-1.0/python/myDevices/os/getsysteminfo.py ./myDevices-1.0/python/myDevices/os/threadpool.py ./myDevices-1.0/python/myDevices/os/raspiconfig.py ./myDevices-1.0/python/myDevices/os/services.py ./myDevices-1.0/python/myDevices/schedule/ ./myDevices-1.0/python/myDevices/schedule/__init__.py ./myDevices-1.0/python/myDevices/__main__.py ./myDevices-1.0/python/myDevices/cloud/ ./myDevices-1.0/python/myDevices/cloud/dbmanager.py ./myDevices-1.0/python/myDevices/cloud/vcom_id.py ./myDevices-1.0/python/myDevices/cloud/download_speed.py ./myDevices-1.0/python/myDevices/cloud/actions.py ./myDevices-1.0/python/myDevices/cloud/installer.py ./myDevices-1.0/python/myDevices/cloud/updater.py ./myDevices-1.0/python/myDevices/cloud/__init__.py ./myDevices-1.0/python/myDevices/cloud/trigger.py ./myDevices-1.0/python/myDevices/cloud/client.py ./myDevices-1.0/python/myDevices/cloud/scheduler.py ./myDevices-1.0/python/myDevices/__init__.py ./myDevices-1.0/python/myDevices/requests_futures/ ./myDevices-1.0/python/myDevices/requests_futures/sessions.py ./myDevices-1.0/python/myDevices/requests_futures/__init__.py ./myDevices-1.0/python/myDevices/sensors/ ./myDevices-1.0/python/myDevices/sensors/sensors.py ./myDevices-1.0/python/myDevices/sensors/__init__.py ./myDevices-1.0/python/myDevices/sensors/client.py ./myDevices-1.0/python/myDevices/remoteaccess/ ./myDevices-1.0/python/myDevices/remoteaccess/__init__.py ./myDevices-1.0/python/myDevices/utils/ ./myDevices-1.0/python/myDevices/utils/logger.py ./myDevices-1.0/python/myDevices/utils/config.py ./myDevices-1.0/python/myDevices/utils/singleton.py ./myDevices-1.0/python/myDevices/utils/crypto.py ./myDevices-1.0/python/myDevices/utils/history.py ./myDevices-1.0/python/myDevices/utils/__init__.py ./myDevices-1.0/python/myDevices/utils/mutex.py ./myDevices-1.0/python/setup.py ./myDevices-1.0/python/myDevices.sh ./myDevices-1.0/ca.crt + set -x + exec (0%) Sun Dec 11 13:47:21 UTC 2016 Installing myDevices agent 0 (-1%) Sun Dec 11 13:47:22 UTC 2016 Installing myDevices agent Setup requires at least 200Mb for install
ERROR PyTHON
root@orangepi:~# sudo bash rpi_f0p65dl4fs.sh -v rpi_f0p65dl4fs.sh continuing as new install... --2016-12-11 21:07:47-- http://updates.mydevices.com/raspberry/myDevices-1.0.tar.gz Resolving updates.mydevices.com (updates.mydevices.com)... 54.148.225.117 Connecting to updates.mydevices.com (updates.mydevices.com)|54.148.225.117|:80... connected. HTTP request sent, awaiting response... 200 OK Length: 9804435 (9.3M) [application/x-gzip] Saving to: `/root/myDevices-1.0.tar.gz' 100%[===================================================================================================================================================================================================>] 9,804,435 1.13M/s in 10s 2016-12-11 21:07:57 (953 KB/s) - `/root/myDevices-1.0.tar.gz' saved [9804435/9804435] ./myDevices-1.0/ ./myDevices-1.0/stg_network.ini ./myDevices-1.0/scripts/ ./myDevices-1.0/scripts/tightvncsetup.sh ./myDevices-1.0/scripts/webiopisetup.sh ./myDevices-1.0/scripts/config.sh ./myDevices-1.0/dev_network.ini ./myDevices-1.0/package ./myDevices-1.0/deb/ ./myDevices-1.0/deb/python3-setuptools/ ./myDevices-1.0/deb/python3-setuptools/python3-setuptools_0.6.24-1_all.deb ./myDevices-1.0/deb/python3-setuptools/python3-pkg-resources_0.6.24-1_all.deb ./myDevices-1.0/deb/python3-setuptools/install ./myDevices-1.0/deb/libiw-dev/ ./myDevices-1.0/deb/libiw-dev/libiw-dev_30~pre9-8_armhf.deb ./myDevices-1.0/deb/libiw-dev/install ./myDevices-1.0/deb/package ./myDevices-1.0/deb/debian_dependencies.txt ./myDevices-1.0/deb/tightvncserver/ ./myDevices-1.0/deb/tightvncserver/tightvncserver_1.3.9-6.6_armhf.deb ./myDevices-1.0/deb/tightvncserver/xfonts-base_1.0.4+nmu1_all.deb ./myDevices-1.0/deb/tightvncserver/libjpeg62-turbo_1.4.1-2_armhf.deb ./myDevices-1.0/deb/tightvncserver/expect_5.45-2_armhf.deb ./myDevices-1.0/deb/tightvncserver/install ./myDevices-1.0/deb/libaxis2c0/ ./myDevices-1.0/deb/libaxis2c0/libaxis2c0_1.6.0-6_armhf.deb ./myDevices-1.0/deb/libaxis2c0/install ./myDevices-1.0/deb/download.sh ./myDevices-1.0/deb/install ./myDevices-1.0/deb/install_packages.sh ./myDevices-1.0/crontab.sh ./myDevices-1.0/preprod_network.ini ./myDevices-1.0/3rd_party/ ./myDevices-1.0/3rd_party/jsonpickle-0.9.2.tar.gz ./myDevices-1.0/3rd_party/requests.tar.gz ./myDevices-1.0/3rd_party/package ./myDevices-1.0/3rd_party/psutil-0.5.0.tar.gz ./myDevices-1.0/3rd_party/iwlib-1.5.tar.gz ./myDevices-1.0/3rd_party/netifaces-0.10.4.tar.gz ./myDevices-1.0/3rd_party/install ./myDevices-1.0/3rd_party/enum34-1.0.4.tar.gz ./myDevices-1.0/3rd_party/install_packages.sh ./myDevices-1.0/uninstall.sh ./myDevices-1.0/reboot_install.sh ./myDevices-1.0/python.tar.gz ./myDevices-1.0/addCron.sh ./myDevices-1.0/setup.sh ./myDevices-1.0/libs/ ./myDevices-1.0/libs/libSystemInformation.so ./myDevices-1.0/libs/axis2/ ./myDevices-1.0/libs/axis2/axis2.xml ./myDevices-1.0/libs/axis2/lib/ ./myDevices-1.0/libs/axis2/lib/libaxis2_http_sender.so ./myDevices-1.0/libs/axis2/lib/libaxis2_mod_addr.so ./myDevices-1.0/libs/axis2/lib/libaxis2_http_receiver.so ./myDevices-1.0/libs/axis2/SARSclientChain.pem ./myDevices-1.0/libs/axis2/modules/ ./myDevices-1.0/libs/axis2/modules/addressing/ ./myDevices-1.0/libs/axis2/modules/addressing/libaxis2_mod_addr.so ./myDevices-1.0/libs/axis2/modules/addressing/module.xml ./myDevices-1.0/libs/axis2/modules/logging/ ./myDevices-1.0/libs/axis2/modules/logging/libaxis2_mod_log.so ./myDevices-1.0/libs/axis2/modules/logging/module.xml ./myDevices-1.0/libs/axis2/SARSserverCert.pem ./myDevices-1.0/libs/libMYOPX.so ./myDevices-1.0/live_network.ini ./myDevices-1.0/python/ ./myDevices-1.0/python/myDevices.service ./myDevices-1.0/python/myDevices.init.sh ./myDevices-1.0/python/myDevices/ ./myDevices-1.0/python/myDevices/ipgetter/ ./myDevices-1.0/python/myDevices/ipgetter/__init__.py ./myDevices-1.0/python/myDevices/wifi/ ./myDevices-1.0/python/myDevices/wifi/WirelessLib.py ./myDevices-1.0/python/myDevices/wifi/WifiManager.py ./myDevices-1.0/python/myDevices/wifi/wifisetup.py ./myDevices-1.0/python/myDevices/wifi/__init__.py ./myDevices-1.0/python/myDevices/os/ ./myDevices-1.0/python/myDevices/os/daemon.py ./myDevices-1.0/python/myDevices/os/cpu.py ./myDevices-1.0/python/myDevices/os/systeminfo.py ./myDevices-1.0/python/myDevices/os/__init__.py ./myDevices-1.0/python/myDevices/os/getsysteminfo.py ./myDevices-1.0/python/myDevices/os/threadpool.py ./myDevices-1.0/python/myDevices/os/raspiconfig.py ./myDevices-1.0/python/myDevices/os/services.py ./myDevices-1.0/python/myDevices/schedule/ ./myDevices-1.0/python/myDevices/schedule/__init__.py ./myDevices-1.0/python/myDevices/__main__.py ./myDevices-1.0/python/myDevices/cloud/ ./myDevices-1.0/python/myDevices/cloud/dbmanager.py ./myDevices-1.0/python/myDevices/cloud/vcom_id.py ./myDevices-1.0/python/myDevices/cloud/download_speed.py ./myDevices-1.0/python/myDevices/cloud/actions.py ./myDevices-1.0/python/myDevices/cloud/installer.py ./myDevices-1.0/python/myDevices/cloud/updater.py ./myDevices-1.0/python/myDevices/cloud/__init__.py ./myDevices-1.0/python/myDevices/cloud/trigger.py ./myDevices-1.0/python/myDevices/cloud/client.py ./myDevices-1.0/python/myDevices/cloud/scheduler.py ./myDevices-1.0/python/myDevices/__init__.py ./myDevices-1.0/python/myDevices/requests_futures/ ./myDevices-1.0/python/myDevices/requests_futures/sessions.py ./myDevices-1.0/python/myDevices/requests_futures/__init__.py ./myDevices-1.0/python/myDevices/sensors/ ./myDevices-1.0/python/myDevices/sensors/sensors.py ./myDevices-1.0/python/myDevices/sensors/__init__.py ./myDevices-1.0/python/myDevices/sensors/client.py ./myDevices-1.0/python/myDevices/remoteaccess/ ./myDevices-1.0/python/myDevices/remoteaccess/__init__.py ./myDevices-1.0/python/myDevices/utils/ ./myDevices-1.0/python/myDevices/utils/logger.py ./myDevices-1.0/python/myDevices/utils/config.py ./myDevices-1.0/python/myDevices/utils/singleton.py ./myDevices-1.0/python/myDevices/utils/crypto.py ./myDevices-1.0/python/myDevices/utils/history.py ./myDevices-1.0/python/myDevices/utils/__init__.py ./myDevices-1.0/python/myDevices/utils/mutex.py ./myDevices-1.0/python/setup.py ./myDevices-1.0/python/myDevices.sh ./myDevices-1.0/ca.crt + set -x + exec (0%) Sun Dec 11 21:08:00 UTC 2016 Installing myDevices agent 0 Sun Dec 11 21:13:23 UTC 2016 Found Python 3.2.3... (50%) Sun Dec 11 21:13:23 UTC 2016 Copying agent libraries (55%) Sun Dec 11 21:13:25 UTC 2016 Installing python utils (60%) Sun Dec 11 21:14:53 UTC 2016 Installing software components Sun Dec 11 21:14:57 UTC 2016 Cannot install for Python 3.2.3 : missing development headers\n Sun Dec 11 21:14:57 UTC 2016 Finished agent code Sun Dec 11 21:14:57 UTC 2016 ERROR: myDevices cannot be installed - please check errors above
SOLUCION
Había tenido este mismo problema hace mucho tiempo Sudo apt-get update Seguido por Sudo ./setup.sh Resuelto el problema para mí (que está asumiendo su instalación en Raspbian)
root@orangepi:~# sudo apt-get update Get:1 http://mirrordirector.raspbian.org wheezy Release.gpg [473 B] Get:2 http://archive.raspberrypi.org wheezy Release.gpg [473 B] Get:3 http://mirrordirector.raspbian.org wheezy Release [14.4 kB] Get:4 http://archive.raspberrypi.org wheezy Release [17.6 kB] Hit http://raspberrypi.collabora.com wheezy Release.gpg Hit http://raspberrypi.collabora.com wheezy Release Get:5 http://mirrordirector.raspbian.org wheezy/main armhf Packages [6,934 kB] Get:6 http://archive.raspberrypi.org wheezy/main armhf Packages [145 kB] Hit http://raspberrypi.collabora.com wheezy/rpi armhf Packages Ign http://raspberrypi.collabora.com wheezy/rpi Translation-en_GB Ign http://raspberrypi.collabora.com wheezy/rpi Translation-en Ign http://archive.raspberrypi.org wheezy/main Translation-en_GB Ign http://archive.raspberrypi.org wheezy/main Translation-en Get:7 http://mirrordirector.raspbian.org wheezy/contrib armhf Packages [23.6 kB] Get:8 http://mirrordirector.raspbian.org wheezy/non-free armhf Packages [49.3 kB] Get:9 http://mirrordirector.raspbian.org wheezy/rpi armhf Packages [592 B] Ign http://mirrordirector.raspbian.org wheezy/contrib Translation-en_GB Ign http://mirrordirector.raspbian.org wheezy/contrib Translation-en Ign http://mirrordirector.raspbian.org wheezy/main Translation-en_GB Ign http://mirrordirector.raspbian.org wheezy/main Translation-en Ign http://mirrordirector.raspbian.org wheezy/non-free Translation-en_GB Ign http://mirrordirector.raspbian.org wheezy/non-free Translation-en Ign http://mirrordirector.raspbian.org wheezy/rpi Translation-en_GB Ign http://mirrordirector.raspbian.org wheezy/rpi Translation-en Fetched 7,185 kB in 1min 2s (114 kB/s) Reading package lists... Done W: Ignoring Provides line with DepCompareOp for package libjpeg62 W: You may want to run apt-get update to correct these problems
root@orangepi:/# find / -name 'setup.sh' /root/myDevices-1.0/setup.sh root@orangepi:/# cd root root@orangepi:~# cd myDevices-1.0 root@orangepi:~/myDevices-1.0# ls - 3rd_party addCron.sh ca.crt crontab.sh deb dev_network.ini libs live_network.ini package preprod_network.ini python python.tar.gz reboot_install.sh scripts setup.sh stg_network.ini uninstall.sh root@orangepi:~/myDevices-1.0# sudo ./setup.sh + exec 00%) root@orangepi:~/myDevices-1.0#

Debe estar conectado para enviar un comentario.