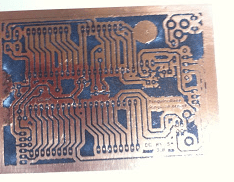
Un circuito impreso no es mas que una placa aislante sobre la cual se dibujan «pistas» e «islas» de cobre las cuales formaran el trazado de dicho circuito, partiendo de un plano creado normalmente desde un esquema eléctrico que se pasa a pcb con un programa de enrutamiento ,aunque obviamente ese se puede hacer de forma manual.
Para empezar tenemos que decidir que material vamos a precisar pues si se trata de un circuito donde vayan a estar señales de radio o de muy alta frecuencia tendremos que usar placas de fibra de vidrio o de pertinax, que es un material poco alterable por la humedad o de lo contrario, para la mayoría de las aplicaciones, con placa de fenólico , baquelita , etc pueden ser mas que suficiente.
Tradicionalmente los PCB se realizaban a partir de un método foto-químico : se exponía con luz una placa de cobre cubierta de emulsión fotosensible con un acetato transparente que contenida el diseño de las pistas , luego se revelaba y finalmente se atacaba con un ácido , el cual normalmente era cloruro ferrico(FeCI3) o una disolución de agua oxigenada de 100 volúmenes y agua fuerte(H2SO4)
Mas modernamente con las fotocopiadoras o las impresoras láser , se ha sustituido la placa fotosensible por simplemente una fotocopia con el diseño del pcb que se pone cara abajo con la placa virgen y se plancha el conjunto

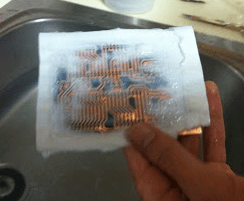
Después del planchado se humedece en agua caliente , se retira el papel (con cuidado de romper la tiras de tinta ) y luego se ataca finalmente con un ácido que también puede ser una disolución de agua oxigenada de 100 volúmenes y agua fuerte(H2SO4) o cloruro ferrico(FeCI3).
Este proceso ultimo por cierto requiere que pulamos con lana de acero o el estropajo de aluminio hasta que quede brillante pues dependiendo de como quede de limpia se pegará mas o menos el toner (de nuestra fotocopia) en la placa.
Hasta ahora hemos descrito como se hacían ( y/o se siguen haciendo) muchas placas de circuito impreso para uso personal pero ¿y si existiera algún otro método menos engorroso,limpio, eficiente,profesional y menos peligroso para hacer una placa de circuito impreso?
Pues en efecto se puede hacer y gracias a una máquina CNC, que no solo sirve para crear piezas de todo tipo, sino que también puede servir para hacer placas PCB caseras en muy poco tiempo (por ejemplo diseñadas com EAGLE y PCB-gcode)
Un programa muy famoso es bCNC que nos permite controlar un CNC que funcione a través de arduino y que usen el firmware grbl. Este programa es el mas completo en cuanto a funciones, pero quizás tenga demasiadas opciones que dificultan que nos centremos en el proceso que vamos buscando , que es el de creación de pcb mediante el pulido de las zonas que no deben conducir con una herramienta controlada por control numérico
Precisamente para superar las dificultades de bcnc surge OpenCNCPilot , que es un sencillo programa creado específicamente para crear placas PCB con una maquina CNC .
Este programa es gratuito y esta disponible únicamente para windows desde la pagina de github en https://github.com/martin2250/OpenCNCPilot
Podemos ver una descripción general rápida en YouTube:
OpenCNCPilot es un emisor de código G compatible con GRBL.
Su característica principal es su capacidad de explorar áreas definidas por el usuario para alabeo y envolver la trayectoria alrededor de la superficie curva . Esto es especialmente útil para grabar superficies metálicas con cortadores en forma de V donde cualquier desviación en la dirección Z resultará en trazas más anchas o más angostas, por ejemplo, para el aislamiento de PCBs donde el alabeo daría lugar a rastros rotos o en corto.
Está escrito en C # y usa WPF para su interfaz de usuario. Lamentablemente, esto significa que no se ejecutará en Linux, ya que Mono no es compatible con WPF. La ventana gráfica 3D se gestiona con HelixToolkit.
Instalación y primeros pasos
Para instalar este programa se requiere .NET 4.6 ,Vaya a la sección de Versiones y descargue los últimos binarios (o compílelo desde la fuente). Descomprima todos los archivos en su disco duro y ejecute «OpenCNCPilot.exe«
Asegúrese de utilizar la versión 1.1f de GRBL (las versiones posteriores pueden funcionar pero aún no han sido probadas)
Antes de la primera ejecución, debe seleccionar un puerto serie, el selector está oculto en el menú de configuración al que puede acceder en la pestaña «Máquina». Aparte de eso, no es necesario modificar ninguna configuración de modo que seleccionado podra conectarte a su máquina.
Abra archivos gcode o height map arrastrándolos a la ventana, o usando los botones correspondientes.
Para crear un nuevo mapa de altura, abra la pestaña «Sonda» y haga clic en «Crear nuevo». Se le pedirá que ingrese las dimensiones.
Asegúrese de ingresar las coordenadas reales, por ejemplo, cuando su trayectoria esté en la dirección X negativa, ingrese «-50» a «0» en lugar de «0» a «50». Verá una vista previa del área y los puntos individuales en la ventana principal
Para explorar el área, configure su sistema de coordenadas de trabajo ingresando «G92 X0 Y0 Z0» en su origen seleccionado, asegúrese de conectar el A5 de su Arduino a la herramienta y GND a su superficie , y presione «Ejecutar».
Una vez que haya terminado de explorar la superficie, cargue el archivo gcode que desea ejecutar y presione el botón «Aplicar mapa de altura» en la pestaña «Editar». Ahora puede ejecutar el código con el botón «Inicio» en la pestaña «Archivo».
En la ultima version hay una opción muy interesante, casi diría que imprescindible, como el autonivelado por malla. Eso permite que la profundidad de corte siempre sea la misma y el resultado quede perfecto.

Debe estar conectado para enviar un comentario.