A estas alturas debido al bajo precio así como la rápida obsolescencia de las tabletas de origen asiático, no siempre merece la pena reparar una tableta pues en la mayoría de las ocasiones las piezas de repuesto, casi siempre vienen de Asia, y al precio de compra hay que sumarle el costo del transporte desde allí y no siempre compensará el gasto adicional de piezas para su reparación.
Los elementos que se suelen romper con más frecuencia en una tableta, como se ha comentado ya en este blog, muy resumidamente son los siguientes:
- El panel táctil (puede ser «reemplazado» usando un ratón via OTG , pero la experiencia no sera la misma)
- El panel LCD(en cierta manera puede ser minimizado si esta cuenta con salida hdmi o mini hdmi pues la podemos conectar a un monitor o TV ,pero también es cierto que la mayoria de las tabletas de bajo costo no cuenta con esa posibilidad )
- A menudo se rompen los 2 elementos anteriores la vez, pues va superpuesto el panel encima de la pantalla LCD y los dos son de cristal.
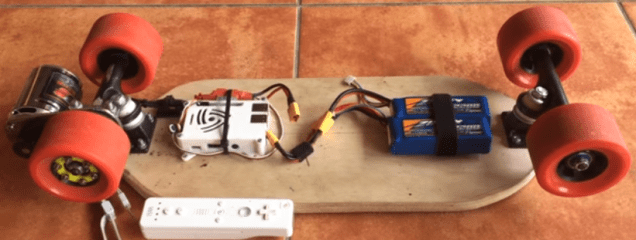
- La placa madre: en este caso ,la mayoría de las veces no arrancara el sistema operativo pero aun asi podremos usarla como gestor de carga para la batería y también para la alimentación de leds de potencia o motores gracias al convertidor DC/DC usado para la reto-iluminación del panel lcd
Según el estado y grado de la avería de la tableta podremos utilizar en mayor o medida algunas piezas
Lo primero que tendremos que hacer es desmontar la tableta siendo lo más habitual que la tapa trasera y la parte frontal vayan encajadas con pestañas de plástico. Para no romperlas, lo mejor es separar las dos partes con algo de plástico, como la capucha de un bolígrafo y así podremos usar lo siguientes elementos:
- La batería, normalmente de Polímero de Litio, suele llevar impresas las características, como la tensión nominal, de 3,7 V, y la capacidad, en este caso de 3000 mAh. La batería se puede aprovechar, por ejemplo, para hacernos una batería portátil USB.
- El cargador , normalmente de 5V y hasta 2A por ejemplo cambiando el conector nos puede servir para alimentar una placa Raspberry Pi
- También llevan altavoces, uno o dos. Son muy pequeños y de poca potencia, pero se pueden utilizar para reparar algunos auriculares, por ejemplo.
- Panel reto-iluminación del LCD: En caso de romperse el lcd al que van adherida ,aun es posible darle una utilidad a esta parte si lo separamos, pues podremos utilizarlo para hacer una mesa de calco o, si es lo suficientemente luminoso (los de 7 pulgadas no iluminan mucho, mejor más grande) se puede hacer una caja de luz para fotografía de objetos pequeño
- Circuito de carga de bateria : si la placa madre no tiene salida de vídeo o incluso este averiada por completo , aun podremos usarla como gestor de carga para la propia batería que incluye la tableta alimentando otra carga.También la placa madre puede ser usada para la alimentación de leds de potencia o motores gracias al convertidor DC/DC usado para la reto-iluminación del panel lcd . En el siguiente video podemos ver como aprovecharnos de esta placahttp://www.youtube.com/watch?v=mqhkr7h_CxM
- Reciclar el digitalizador incluso roto:esta es una idea de posoco ,que es es capaz de determinar mediante un método muy sencillo una parte que este operativa del panel , para luego utilizar esa parte como sensor capacitivo de un solo canal :
- Reciclar la tarjeta wifi: Algunas tabletas chinas integran el modulo wifi aparte como una extensión. Un modulo muy usado es el rtl8723, el cual incluso integra un adaptador wifi y bluetooth con interfaz usb en la misma placa por lo que lo único que hay que hace es desoeldarlo de la tableta y luego soldarlo a un conector usb .En el siguiente vídeo nos muestran la manera en que podemos reciclarla la tarjeta de WIFi de una tablet china rota para ser utilizada en un pc cualquiera.Para los que tienen tarjetas que funcione exclusivamente con 3.3v también una forma muy sencilla de educir el voltaje via un 7833 y un condensador de 1mf ( en este video podemos ver mas detalles https://youtu.be/xHM26u_da48)
Para terminar respecto a la placa madre , si aun no les es de utilidad el circuito de carga o el convertidor dc-dc también le pueden servir todos los conectores ,pulsadores, etc que estas llevan.
¿Se le ocurre alguna pieza que nos hayamos olvidado en este resumen?


Debe estar conectado para enviar un comentario.