Instalación
Home Assistant es una plataforma de automatización del hogar basada en software libre que se ejecuta en una computadora y le permite controlar y automatizar dispositivos del hogar, como luces, cerraduras, electrodomésticos y más. Home Assistant se puede integrar con una amplia variedad de dispositivos y servicios, como Amazon Alexa, Google Home y muchos otros, y puede ser controlado a través de una interfaz web o a través de una aplicación móvil. Es una herramienta muy útil para aquellos que quieren tener control sobre sus dispositivos del hogar y automatizar tareas repetitivas.
Home Assistant es por tanto un software de código abierto que le permite monitorear dispositivos IoT en su hogar que además, puede crear automatización fácilmente. Por ejemplo, cuando la temperatura es inferior a 21 grados, puede enviar una notificación a su dispositivo móvil. Además, puede hacer funcionar su calentador si tiene un calentador conectado.
Algunos ejemplos de lo que puede hacer con Home Assistant incluyen:
- Encender o apagar las luces de la casa de manera automática cuando se active o desactive un sensor de movimiento.
- Abrir o cerrar las persianas de manera automática cuando se active o desactive un sensor de luz.
- Encender o apagar la calefacción de manera automática cuando la temperatura del hogar suba o baje por debajo de un cierto umbral.
- Recibir notificaciones cuando se abra o cierre una puerta o ventana.
- Controlar los electrodomésticos de la casa, como la lavadora o el horno, a través de una interfaz web o una aplicación móvil.
Como puede ver, hay muchas cosas que puede hacer con Home Assistant, y esta es solo una pequeña muestra. Si tiene dispositivos inteligentes en su hogar o está interesado en automatizar tareas y procesos, Home Assistant puede ser una herramienta muy útil para usted.
Existen varias formas de instalar Home Assistant, dependiendo de su plataforma y preferencias personales. A continuación se presentan algunas opciones comunes:
- Instalación en un ordenador con sistema operativo de escritorio: Para instalar Home Assistant en un ordenador con sistema operativo de escritorio (como Windows, MacOS o Linux), primero debe descargar el instalador del sitio web oficial de Home Assistant. A continuación, siga las instrucciones del instalador para completar la instalación.
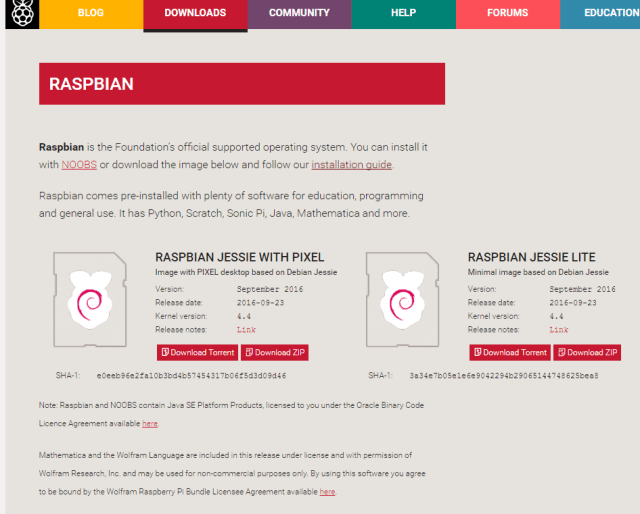
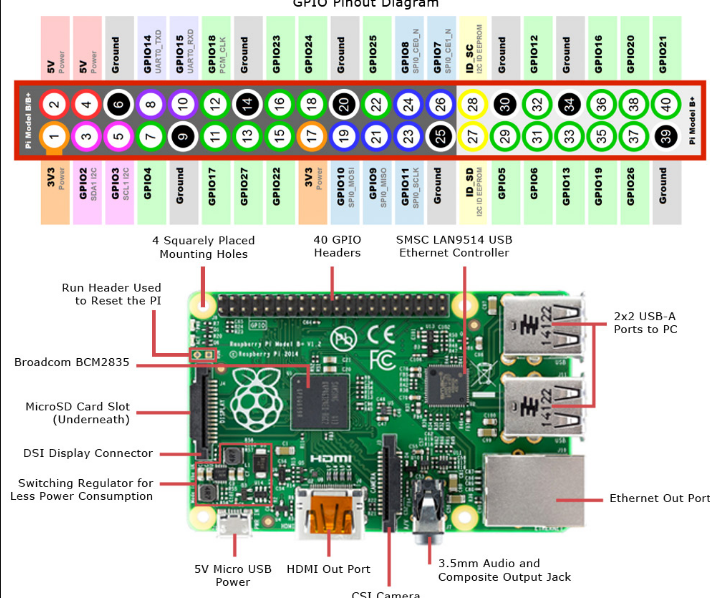
- Instalación en una Raspberry Pi: Home Assistant se puede instalar en una Raspberry Pi, que es un ordenador de bajo costo y tamaño reducido. Para hacerlo, primero debe instalar el sistema operativo Raspberry Pi en una tarjeta SD, luego descargar e instalar Home Assistant siguiendo las instrucciones del sitio web oficial.
- Instalación en una nube: Si prefiere no tener que administrar su propio ordenador, puede instalar Home Assistant en un servicio en la nube como Google Cloud, Amazon Web Services o Azure. Esto le permitirá acceder a Home Assistant desde cualquier lugar y en cualquier momento, pero también implicará ciertos costos de suscripción.
- Instalación en un contenedor: Si prefiere una instalación más ligera y fácil de actualizar, puede instalar Home Assistant en un contenedor, como Docker. Esto le permitirá ejecutar Home Assistant en cualquier plataforma compatible con Docker sin tener que preocuparse por la instalación y configuración del sistema operativo.
En la practica, en la mayoría de los casos, Home Assistant se suele instalar en una Raspberry pi como se muestra en el documento oficial . Sin embargo, en este post vamos ver cómo instalar en su ordenador y de un modo terriblemente sencillo usando docker compose.
Comencemos por crear el directorio myproject. En este directorio, cree un subdirectorio llamado config. Debería tener un árbol que se parezca a:
| myproject
| -- docker-compose.yaml
| -- config
Ahora agregue el archivo docker-compose.yaml a la carpeta myproject.
# docker-compose.yaml
version: "3.5"
services:
homeassistant:
container_name: home-assistant
image: homeassistant/home-assistant:stable
volumes:
- ./config:/config
environment:
- TZ=Europe/Paris
restart: always
ports:
- 8123:8123
network_mode: host
Ejecute el asistente de inicio:
$ docker-compose up -d
Configuración
Enhorabuena, su Home Assistant ya se está ejecutando, de modo que ahora necesita configurarlo de la siguiente manera:
- Vaya a http://localhost:8123
- Cree su cuenta usando un nombre de usuario y contraseña
- Agregue su ubicación si está interesado en ver datos meteorológicos
- Luego haga clic en finalizar
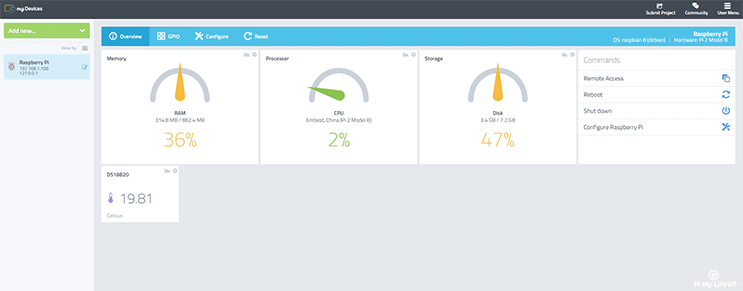
Debería aparecer una página de inicio similar a la siguiente:
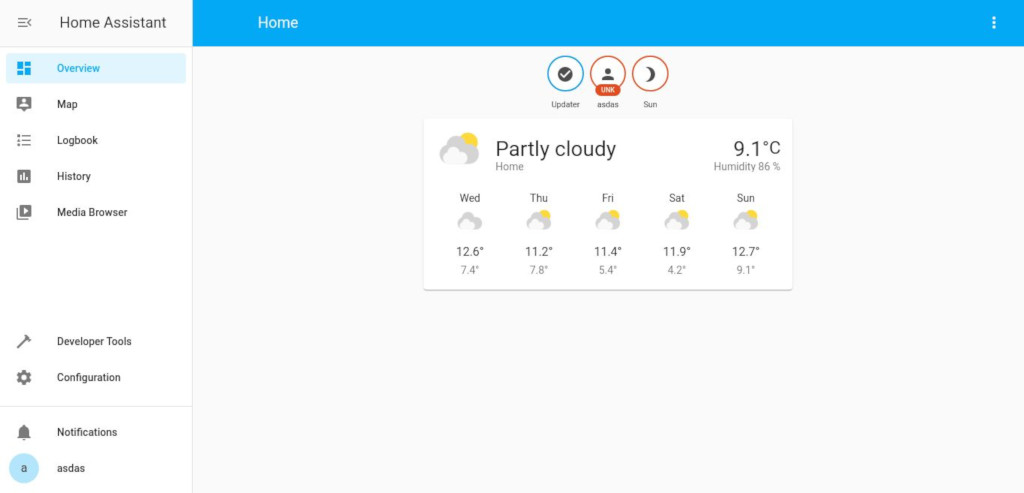
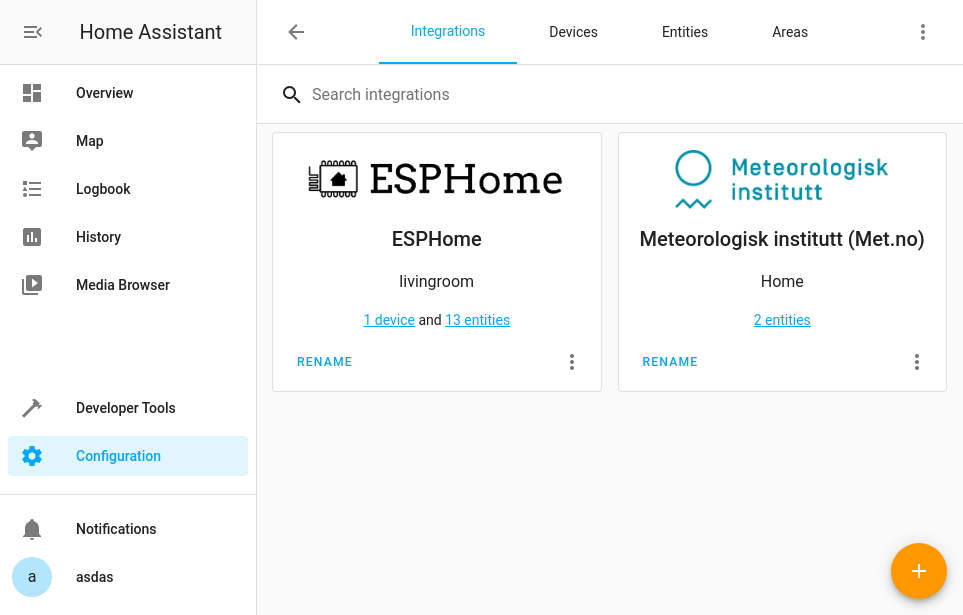
Estos son lo pasos para continuar con la configuración del asistente doméstico:
- Haga clic en
Configuration, en la parte inferior izquierda. - Ir a
Integrations - Haga clic en el
+botón en la parte inferior derecha. - Aparecerá un modal con la lista de dispositivos compatibles, haga clic en
esphome. - Agregue la dirección IP de su ESP32, deje el puerto en
6053. - Haga clic en finalizar.
Ahora tienes un ESPhome configurado correctamente.
Agregar datos a la página de inicio
Una vez que haya configurado un dispositivo ESPhome, ahora puede agregar los datos que proporciona a su página de inicio. Por ejemplo, si su dispositivo está conectado al termómetro Xiaomi Mijia, el objetivo podria server los datos de temperatura y humedad, por lo tendría que seguir los siguientes pasos:
- Haga clic en
Configuration, en la parte inferior izquierda. - Ir a
Devices. - Haga clic en su dispositivo.
- En la parte inferior Entidades, haga clic en
Add to Lovelace.
Finalmente, regrese a la página de inicio y controle la temperatura de su sala de estar desde la página de inicio.

Acceso a la temperatura desde el exterior
Vigilar su casa cuando está adentro es importante, pero también lo es cuando está afuera.
- En primer lugar, abra el puerto 8123 en su router y reenvíelo al host del asistente doméstico.
- Descargue la aplicación Home Assistant para Android o iOS .
- Obtenga la IP pública de su puerta de enlace doméstica usando https://www.showmyipaddress.eu/
- Abra la aplicación y agregue la url de conexión http://yourpublicip:8123/
- Felicitaciones por instalar el acceso a Home Assistant desde el exterior con éxito.


Debe estar conectado para enviar un comentario.