Internet está lleno de herramientas increíbles, pero muchas pasan desapercibidas. Existen páginas web tan potentes que pueden ayudarte a trabajar más rápido, ahorrar dinero y resolver problemas técnicos sin necesidad de instalar nada. En esta entrada te presento en primer lugar tres sitios web poco conocidos que parecen sacados del futuro y que funcionan directamente desde el navegador. Además a esta lista te propongo añadir 9 páginas web futuristas y poco conocidas que pueden ahorrarte tiempo y resolver problemas: reparación de dispositivos, IA para crear imágenes, edición de PDFs, modelos 3D, software gratuito y más. Todas funcionan desde el navegador y son realmente útiles.
Si te gusta descubrir herramientas útiles, inteligencia artificial y tecnología que realmente aporta valor, esta selección creo te va a encantar.

1. iFixit: guía para reparar tus dispositivos paso a paso
En efecto iFixit es una plataforma imprescindible para quienes quieren reparar sus dispositivos sin depender de un servicio técnico.
iFixit es una empresa privada estadounidense de San Luis Obispo, California. La causa de su fundación se debió a que Kyle Wiens no encontraba un manual de reparación del Apple iBook G3, mientras participaba en la Universidad Politécnica Estatal de California
Ofrece guías detalladas, despieces, herramientas recomendadas y soluciones paso a paso para móviles, portátiles, consolas, electrodomésticos y mucho más. Todo está explicado de forma visual y accesible, incluso para principiantes.

2. Whisk: crea visuales con IA sin saber escribir prompts
https://labs.google/fx/tools/whisk
Whisk es una herramienta experimental de Google que permite generar imágenes con inteligencia artificial sin necesidad de escribir prompts complejos. Puedes dibujar, arrastrar elementos o modificar formas, y la IA se encarga del resto. Es ideal para crear conceptos visuales rápidos sin conocimientos técnicos.
3. Napkin: convierte tus ideas en imágenes con IA
Napkin transforma ideas en imágenes de forma automática. Solo tienes que escribir una frase sencilla o seleccionar un concepto, y la herramienta genera visuales limpios y profesionales sin ajustes complicados. Perfecta para creadores de contenido, educadores y diseñadores.
Por cierto también es ideal para generar gráficos interesantes para trabajos científicos que son realmente atractivos visualmente.
Más páginas web interesantes que deberías conocer
Además de las herramientas anteriores, existen otras páginas web realmente potentes que pueden ayudarte a trabajar mejor, aprender nuevas habilidades y resolver tareas complejas sin instalar nada.
4. ILovePDF: convierte, edita y organiza PDFs en segundos
ILovePDF es una de las herramientas más completas para trabajar con documentos PDF desde el navegador. Permite unir, dividir, comprimir, convertir, proteger y editar PDFs de forma rápida y gratuita.
Su fundador de iLovePDF es Marco Grossi, un diseñador y desarrollador español nacido en Barcelona. Lanzó la plataforma en 2010 por una razón puramente práctica: necesitaba unir dos archivos PDF y no encontró ninguna herramienta gratuita o sencilla en internet que le permitiera hacerlo sin complicaciones. Recién graduado en diseño, Grossi se enfrentó a la frustración de no poder realizar tareas básicas de edición de PDF de forma rápida. En lugar de buscar software complejo o de pago, decidió programar él mismo una solución web simple que inicialmente solo servía para fusionar y dividir archivos.
Lo que comenzó como un proyecto personal sin un plan de negocios ni inversores, se volvió viral por su utilidad. Al publicarlo, descubrió que millones de estudiantes y profesionales compartían la misma necesidad de herramientas directas y accesibles.
Hoy en día, el sitio se encuentra entre los más visitados del mundo, superando en ocasiones el tráfico de gigantes como Amazon en mercados específicos como India, manteniendo su filosofía de sencillez y privacidad.
5. SourceForge: software gratuito y de código abierto
SourceForge es uno de los mayores repositorios de software libre. Aquí encontrarás miles de programas gratuitos y seguros para Windows, macOS y Linux. Ideal para descubrir alternativas gratuitas a software comercial.
Fundada en 1999, SourceForge fue pionera en ofrecer servicios gratuitos de repositorio y herramientas de desarrollo para la comunidad de código abierto. Durante años se consolidó como el estándar de la industria para el alojamiento y la distribución de proyectos open source, antes del auge de plataformas como GitHub.
La plataforma ofrece alojamiento de código mediante repositorios compatibles con sistemas de control de versiones como Git, SVN y Mercurial, facilitando la gestión integral del ciclo de desarrollo de software. Además, actúa como un centro masivo de descargas respaldado por una red global de mirrors que garantiza alta disponibilidad y velocidad. También incorpora herramientas de colaboración fundamentales, como sistemas de seguimiento de errores, foros de soporte, wikis para documentación técnica y listas de correo que permiten la comunicación fluida entre desarrolladores y usuarios. En su evolución más reciente, SourceForge funciona igualmente como un comparador de software empresarial, permitiendo revisar y contrastar más de 100.000 soluciones comerciales.
A lo largo de su historia ha albergado más de 500.000 proyectos, entre los que destacan 7-Zip, reconocido por su alta tasa de compresión; FileZilla, uno de los clientes FTP multiplataforma más utilizados; Audacity, editor y grabador de audio libre; y Sweet Home 3D, aplicación orientada al diseño de interiores.
Desde 2016, SourceForge es propiedad de Slashdot Media. Bajo esta administración se eliminaron prácticas controvertidas de etapas anteriores, como la inclusión de adware en algunos instaladores, y actualmente se aplican escaneos automáticos de malware a todos los archivos alojados, reforzando así la seguridad y la confianza de los usuarios.
6. Instructables: aprende a crear, reparar y construir cualquier cosa
https://www.instructables.com/
Instructables es una comunidad enorme donde usuarios comparten tutoriales paso a paso para construir, reparar o crear prácticamente cualquier cosa: electrónica, cocina, carpintería, impresión 3D, manualidades y más.
7. Thingiverse: miles de modelos 3D listos para imprimir
Thingiverse es una de las mayores plataformas de modelos 3D gratuitos ( y una de las mas conocidas). Puedes descargar diseños listos para imprimir: piezas de repuesto, juguetes, herramientas, accesorios, soportes y miles de objetos creados por la comunidad.
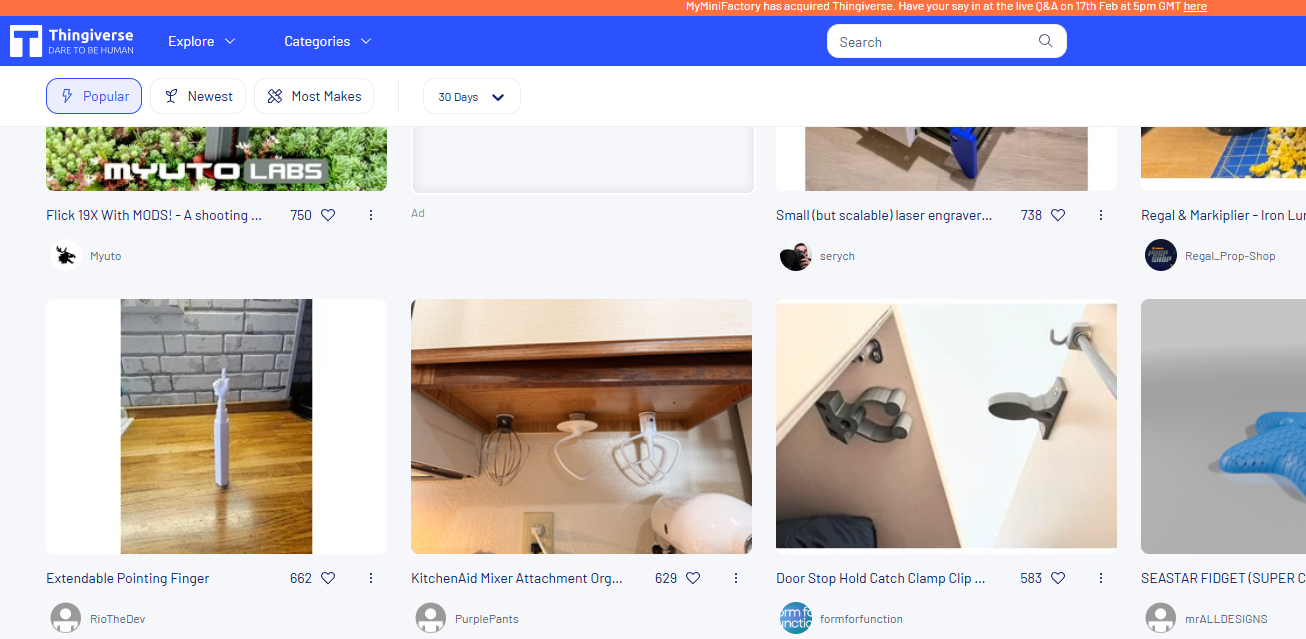
MyMiniFactory ha adquirido el 100 % de Thingiverse —la plataforma histórica de intercambio de archivos imprimibles en 3D— de su anterior propietario, Ultimaker. Este movimiento convierte a Thingiverse en parte del ecosistema SoulCrafted de MyMiniFactory, que agrupa varias comunidades y herramientas centradas en diseñadores y creadores del ámbito de la impresión 3D.
La razón principal de la adquisición es estratégica: MyMiniFactory quiere revitalizar y modernizar Thingiverse, que había perdido dinamismo y comunidad con el tiempo, y asegurar un entorno que valore y proteja el trabajo creativo humano frente al contenido generado masivamente por inteligencia artificial. Bajo esta nueva dirección se mantendrá el acceso gratuito a los modelos, se limpiará la biblioteca de archivos obsoletos y se introducirán vías sostenibles de monetización para los diseñadores, reforzando así la experiencia y la viabilidad del ecosistema para la comunidad global de usuarios.
8. Photopea: edición de imágenes estilo Photoshop sin instalar nada
Photopea es un editor de imágenes avanzado compatible con PSD, PNG, JPG, Sketch y más. Su interfaz recuerda a Photoshop, lo que lo convierte en una alternativa gratuita y accesible para diseñadores y creadores.
9. Remove.bg: elimina fondos de imágenes automáticamente
Remove.bg utiliza IA para eliminar el fondo de cualquier imagen en segundos. Es extremadamente preciso y perfecto para miniaturas, banners, presentaciones o redes sociales.

10. TinyWow: herramientas todo‑en‑uno para PDF, vídeo, imágenes y más
TinyWow reúne decenas de utilidades gratuitas: convertir archivos, editar PDFs, comprimir vídeos, eliminar fondos, generar imágenes con IA y mucho más. Todo sin registro.
11. Tinkercad: diseño 3D y electrónica para principiantes
Tinkercad permite crear modelos 3D, simular circuitos y programar placas como Arduino de forma visual. Es ideal para estudiantes, makers y profesores.
Tinkercad es una aplicación web gratuita de diseño 3D desarrollada por Autodesk, orientada tanto a principiantes como a entornos educativos. Funciona íntegramente en el navegador y se basa en un sistema intuitivo de modelado mediante sólidos geométricos que se combinan con operaciones booleanas, lo que permite crear piezas listas para impresión 3D sin necesidad de conocimientos avanzados de CAD. Además del modelado tridimensional, incorpora módulos de diseño de circuitos electrónicos y programación por bloques (compatible con Arduino), lo que la convierte en una herramienta muy utilizada en educación STEM y en iniciación a la fabricación digital.

12. Wolfram Alpha: respuestas inteligentes a preguntas complejas
Wolfram Alpha es un motor de conocimiento computacional desarrollado por Wolfram Research que permite responder consultas mediante cálculos, análisis de datos y generación de información basada en hechos, en lugar de ofrecer simples enlaces web. Capaz de procesar fórmulas matemáticas, estadísticas, química, física, finanzas y más, Wolfram Alpha combina algoritmos avanzados con una amplia base de datos estructurada, proporcionando resultados precisos y gráficos interactivos. Es ampliamente utilizado en educación, investigación y aplicaciones profesionales para obtener soluciones rápidas y verificables a problemas complejos.
En resumen Wolfram Alpha es un motor de conocimiento capaz de resolver problemas matemáticos, generar gráficos, analizar datos y responder preguntas científicas con precisión.
Conclusión
Estas páginas web demuestran que la tecnología útil no siempre es la más conocida. Tanto si necesitas reparar un dispositivo, crear imágenes con IA, trabajar con PDFs, descargar software seguro o imprimir modelos 3D, estas herramientas pueden ahorrarte tiempo y ayudarte a trabajar mejor.
Si conoces otras páginas futuristas o poco conocidas que merezcan aparecer en una próxima entrada, déjalas en los comentarios.


Debe estar conectado para enviar un comentario.