El proyecto, desarrollado por Michal Szwaj, plantea un sistema para un vehículo en el que es posible controlar la reproducción multimedia o acceder a los mapas de Google, aunque de momento no ofrece funciones como la navegación GPS, pero la versatilidad de la Raspberry Pi con el soporte Bluetooth ,hace que esa opción no parezca difícil de implementar.
OpenAuto, es un proyecto que con una Raspberry Pi 3 y una pantalla táctil nos da acceso a unas funciones muy similares a las que ofrece Android Auto, basándose en la biblioteca aasdk y librerías Qt siendo el objetivo principal ejecutar esta aplicación en una placa de RaspberryPI 3 sin problemas. El proyecto se basa en la instalación de una distribución Linux, Raspbian Stretch, a la que luego se le añaden librerías como las célebres Qt para poder ejecutar las aplicaciones orientadas a ser utilizadas en el coche.
A la Raspberry Pi 3 se le conecta una pantalla táctil (480p, 720p o 1080p) pues este es recomendable para la interacción con el sistema. Completar el proceso es relativamente sencillo, y tanto el código fuente como las instrucciones de instalación están disponibles públicamente en GitHub .
Las funcionalidades soportadas son las siguientes:
- 480p, 720p y 1080p con 30 o 60 FPS.
- Aceleración de hardware de RaspberryPI 3 soporte para decodificar la secuencia de vídeo (hasta 1080p@60).
- Reproducción de audio de todos los canales de audio (los medios de comunicación, sistema y discurso).
- Entrada de audio para comandos de voz.
- Pantalla táctil y soporte de botones de entrada.
- Bluetooth.
- Lanzamiento automático después de dispositivo hotplug.
- Detección automática de dispositivos Android conectados.
- Modo inalámbrico (WiFi) mediante servidor de unidad principal (debe estar habilitado en configuración desarrollador ocultos).
- Configuración fácil de usar.
Electrónica necesaria
Sin duda , aparte de la propia Rasberry Pi 3 , el display táctil es un componte fundamental en este proyecto. Con una resolución de 800×480 el modulo oficial de display +sensor se conecta a la Raspberry Pi 3 a través de una placa adaptadora que se encarga de controlar la alimentación y la señal de vídeo.
Solo se necesitan dos conexiones de la Raspberry Pi 3 : la alimentación desde el conector GPIO y el cable plano al conector DSI, presentes en todas las Raspberry.
El kit incluye:
- Pantalla 7″ multitáctil 10 puntos
- Placa conversara
- Cable plano DSI
- 4x tornillos para ajustar la Raspberry a la pantalla
- 4x cables para conectar la pantalla a la Raspberry

En el siguiente video se puede ver el proceso de montaje de este kit.
El controlador táctil ofrece 10 puntos de presión, por lo que el usar teclados en pantalla como el integrado en Raspbian lo hacen realmente sencillo.
Este kit convierte pues una Raspberry en una tableta multitáctil, sistema de información o dispositivo independiente.Es realmente interactivo pues la ultima version de Raspbian soporta teclado virtual en pantalla, así que no se necesita conectar un teclado y un ratón físicos ni por supuesto una pantalla externa.
Como podemos ver Android Auto se ejecuta en una Raspberry Pi 3 con la pantalla táctil oficial de 7 pulgadas anteriormente citada. Estos son los componentes esenciales para implementar este proyecto:
- Pantalla táctil oficial de Raspberry Pi de 7″
- Raspberry Pi 3
- Convertidor C-DC Converter de 5v
- Tarjeta USB de sonido ( para mejorar el sonido de la Raspberry)
- Camera para Raspberry Pi
- Adaptador por cable hdmi para la cámara para llevar ésta desde la parte atrás del vehículo hasta el frontal de coche por medio de un cable hdmi standard (estos dos adaptadores se pueden buscar en portales orientales como «Pi Camera HDMI Cable Extension»)
- Caja a medida, o si no tiene ganas de construir su propio gabinete, puede comprar fundas de plástico genéricas hechas por «Smarticase»
Raspvid
raspivid es la herramienta de línea de comandos para capturar vídeo con el módulo de cámara nativo de Raspberry. Con el modulo de cámara conectado y activado, se puede grabar un vídeo utilizando el siguiente comando:
raspivid -o vid.h264
Recuerde que debe utilizar y para voltear la imagen si es necesario, como con raspistill-hf-vf (esto guardara un archivo de vídeo 5 segundo en el camino dado aquí como (longitud por defecto de tiempo).vid.h264)
Para especificar la longitud del vídeo tomado, pase en la bandera con un número de milisegundos. Por ejemplo:-t raspivid -o video.h264 -t 10000 (Esto graba 10 segundos de video.)
Para una lista completa de las opciones posibles, ejecutar sin argumentos, o este comando a través de y desplácese a través de la pipa:raspividless
raspivid 2>&1 | lessUtilice las teclas de flecha para desplazarse y el tipo de salida.q
Para ver la cámara trasera ejecutar raspvid seguido de los parámetros , como por ejemplo:
raspvid -t 5000
raspvid -t 0
raspvid -t -vh
raspvid -t 0 -vf ( invierte la imagen)
raspvid -t 0 -hf -vf
Instalar aasdk en Raspberri PI 3
- Instalar el software necesario
sudo apt-get install -y libboost-all-dev libusb-1.0.0-dev libssl-dev cmake libprotobuf-dev protobuf-c-compiler protobuf-compiler
- Repositorio de aasdk clon
$ cd
$ git clone -b master https://github.com/f1xpl/aasdk.git
- Crear el directorio aasdk_build en el mismo nivel que aasdk dir
$ mkdir aasdk_build
$ cd aasdk_build
- Generar archivos de cmake
$ cmake-DCMAKE_BUILD_TYPE = lanzamiento… /AASDK
- Construir aasdk
$ make
Instalar el resto de sw en Raspberry PI 3
- Instalar el software necesario
$ sudo apt-get install -y libqt5multimedia5 libqt5multimedia5-plugins libqt5multimediawidgets5 qtmultimedia5-dev libqt5bluetooth5 libqt5bluetooth5-bin qtconnectivity5-dev pulseaudio librtaudio-dev librtaudio5a
- Construir ilclient de frambuesa PI 3 firmware
$ cd /opt/vc/src/hello_pi/libs/ilclient
$ make
- Repositorio de Open clon
$ cd
$ git clone -b master https://github.com/f1xpl/openauto.git
- Crear el directorio openauto_build en el mismo nivel que Open dir
$ mkdir openauto_build
$ cd openauto_build
- Generar archivos de cmake
Nota: Si es necesario, ajustar los path a su localización de directorios aasdk y aasdk_build.
$ cmake -DCMAKE_BUILD_TYPE=Release -DRPI3_BUILD=TRUE -DAASDK_INCLUDE_DIRS=»/home/pi/aasdk/include» -DAASDK_LIBRARIES=»/home/pi/aasdk/lib/libaasdk.so» -DAASDK_PROTO_INCLUDE_DIRS=»/home/pi/aasdk_build» -DAASDK_PROTO_LIBRARIES=»/home/pi/aasdk/lib/libaasdk_proto.so» ../openauto
- Construir OpenAuto
$ make
- Ejecutar Open
$ /home/pi/openauto/bin/autoapp
Añadir Open a autorun
- Archivo abrir autostart
$ sudo nano /home/pi/.config/lxsession/LXDE-pi/autostart
- Agregar debajo de línea al final del archivo autorun
@/ hogar/pi/Open/bin/autoapp
Apagar Raspbery PI 3 cuando el teléfono se está desconectando
- Archivo abierto openauto.rules
$ sudo nano /etc/udev/rules.d/openauto.rules
- Añadir a continuación las líneas al final del archivo openauto.rules
SUBSISTEMA == «usb», acción == «add», ENV {ID_VENDOR_ID} == «18d 1», ENV {ID_MODEL_ID} == «2d 00» RUN += «/ bin/sh – c ‘ / sbin/shutdown – c & & echo 0 > /sys/class/backlight/rpi_backlight/bl_power'»
SUBSISTEMA == «usb», acción == «add», ENV {ID_VENDOR_ID} == «18d 1», ENV {ID_MODEL_ID} == «2d 01», RUN += «/ bin/sh – c ‘ / sbin/shutdown – c & & echo 0 > /sys/class/backlight/rpi_backlight/bl_power'»
SUBSISTEMA == «usb», acción == «remove», ENV {ID_VENDOR_ID} == «18d 1», ENV {ID_MODEL_ID} == «2d 00» RUN += «/ bin/sh – c ‘ / sbin/shutdown: apagado 1 & & echo 1 > /sys/class/backlight/rpi_backlight/bl_power'»
SUBSISTEMA == «usb», acción == «remove», ENV {ID_VENDOR_ID} == «18d 1», ENV {ID_MODEL_ID} == «2d 01», RUN += «/ bin/sh – c ‘ / sbin/shutdown: apagado 1 & & echo 1 > /sys/class/backlight/rpi_backlight/bl_power'»
Este script va a hacer las siguientes acciones:
- Desactivar el apagado de pantalla y programar de forma retrasada por 1 minuto cuando el teléfono se está desconectando
- Encender la pantalla y cancelar el apagado cuando el teléfono se está conectando
Puede ajustarse el retraso de 1 minuto para sus necesidades.
Reglas de udev (permisos de USB)
Para utilizar Open con sistema operativo basado en Linux (por ejemplo, Raspbian) con udev, debe crear una regla para permitir la comunicación con los dispositivos USB en modo de lectura/escritura.
La regla más simple parece debajo de uno:
SUBSISTEMA == «usb», atributos {idVendor} == «*», atributos {idProduct} == «*», MODE = «0660», grupo = «plugdev»
Para agregar esta regla de udev, hacer:
$ cd /etc/udev/rules.d
$ sudo touch openauto.rules
$ sudo nano openauto.rules
Aplique estas reglas, guarde el archivo y reinicie el dispositivo.
Tenga en cuenta que la regla anterior permite abrir cualquier dispositivo USB en modo de lectura/escritura por cualquier aplicación instalada en el sistema. Considerar como insegura.
Configuración de PulseAudio
Paquetes audio de AndroidAuto se entregan en trozos muy pequeños. Debido a esto podrían necesitarse ajustes de configuración de PulseAudio para evitar problemas con el audio.
Añadir/anulación por debajo de las líneas en /etc/pulse/daemon.conf
resample-method = ffmpeg
En /etc/pulse/default.pa añadir tsched = 0 en la línea de ‘carga-módulo módulo-udev-detect’
load-module module-udev-detect tsched=0
Después de cambios de configuración debe reiniciar la instancia de pulseaudio. Puede hacerlo con la ejecución del comando pulseaudio -k .
Fuente https://github.com/f1xpl/openauto/wiki/Build-instructions
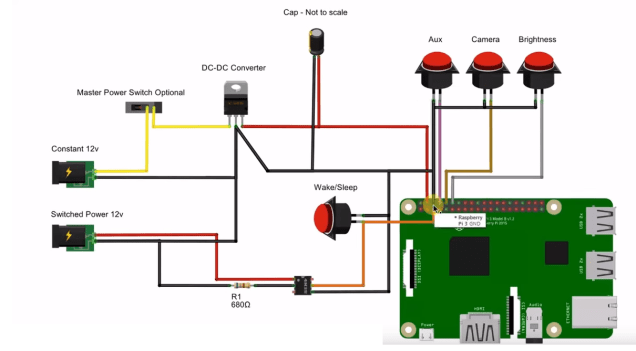
ELECTRÓNICA ADICIONAL
Para facilitar el manejo de openAuto y extender su funcionamiento Everlanders ha conectado 4 pulsadores directos para activar la cámara, variar el brillo o despertar la placa
No deja de ser importante el apartado de alimentación pues en la Raspberry Pi 3 es de 5v DC 2amp y en un automóvil es de 12V requiriéndose un convertidor dc-dc .Obviamente en los tiempos que correen ,es mucho mas eficiente un convertidor conmutado 12v-5v que un regulador 7805

También ,por ultimo para detectar la marcha atrás ,es muy interesante usar un opto-acoplador para aislar a la Raspberry Pi 3 de posibles problemas ele ctricos en el automovil dado el aislamiento galvánico que nos ofrecen los optoaisladores.
El esquema final de este montaje completamente opcional es el siguiente:
Para manejar los pulsadores se requieren los siguientes tres siguientes scripts escritos por el Everlands:
Este script en Python sirve para atenuar la pantalla y cambiar a la cámara de retroceso. Recuerde, que es interesante usar un optoacoplador para detectar la marcha atrás con los la lógica se invierte … 0 = encendido 1 = apagado. Ademas, solo se debe ejecutar uno de estos scripts de «Monitor», es decir no puede estar ejecutando RearviewMonitor.py Y LightMonitor.py
CODIGO DE LIGTMONITOR.PY
#!/usr/bin/python
import RPi.GPIO as GPIO
import time
import subprocess, os
import signal
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
RearView_Switch = 14 # pin 18
Brightness_Switch = 15 # pin 16
#Extra_Switch = 1 # pin 3
GPIO.setup(RearView_Switch,GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(Brightness_Switch,GPIO.IN, pull_up_down=GPIO.PUD_UP)
print » Press Ctrl & C to Quit»
try:
run = 0
bright = 0
while True :
time.sleep(0.25)
# esto restringe la secuencia de comandos para verificar las luces cada 1/4 de segundo. #No tiene sentido revisar 10.000 veces por segundo.
# Si se encienden las luces de marcha atrás, hacer esto:
if GPIO.input(RearView_Switch)==0 and run == 0:
print «Switching Rearview Camera On»
rpistr = «raspivid -t 0 -vf -h 480 -w 800»
p=subprocess.Popen(rpistr,shell=True, preexec_fn=os.setsid)
run = 1
Cuando las luces de marcha atrás se apagan, hacer esto:
if GPIO.input(RearView_Switch)==1 and run == 1:
os.killpg(p.pid, signal.SIGTERM)
print «Killing the reverse camera feed»
run = 0
# Estos dos bloques siguientes monitorean los faros o la luz del marcador y ajustan la #configuración de brillo de la pantalla.
if GPIO.input(Brightness_Switch)==0 and bright == 0:
print «Setting Brightness to 20» # 20 is about 10%
subprocess.call («/usr/local/bin/backlight.sh 20», shell=True)
bright = 1
if GPIO.input(Brightness_Switch)==1 and bright == 1:
print «Setting Brightness back to 255» #255 is 100%
subprocess.call («/usr/local/bin/backlight.sh 255″, shell=True)
bright = 0
except KeyboardInterrupt:
print » Quit»
GPIO.cleanup()
Este script en cshell sirve par ajustar el nivel de luminosidad de la pantalla oficial qeu hemos conectado a la raspberry. Como es de esperar acepta un parámetro que es precisamente un entero entre 0 y 255
CODIGO SCRIPT BACKLIGHT
#!/bin/bash
level=$1
#echo «level given is $level»
if [ $# != 1 ]; then
echo «USAGE: $0 brightness_level (0 to 255)»
exit 1
fi
if [[ $level -ge 0 && $level -le 255 ]]; then
#echo «level given is $level»
echo $level > /sys/class/backlight/rpi_backlight/brightness
echo «Screen brightness set to $level.»
exit 0
else
echo «Brightness level $level is out of range! (0 to 255 only)»
exit 1
fi
Para probar el script de retro-iluminación ejecutar el script con el parámetro usando un valor entero menor que 255 ,por ejemplo ./backlight.sh 128
#!/usr/bin/python
import RPi.GPIO as GPIO
import time
import subprocess, os
import signal
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
RearView_Switch = 14 # pin 18
Brightness_Switch = 15 # pin 16
#Extra_Switch = 1 # pin 3
GPIO.setup(RearView_Switch,GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(Brightness_Switch,GPIO.IN, pull_up_down=GPIO.PUD_UP)
print » Press Ctrl & C to Quit»
try:
run = 0
bright = 0
while True :
time.sleep(0.1)
#los siguientes cuatro bloques se utilizan para alternar entre las vistas de la cámara.
if GPIO.input(RearView_Switch)==0 and run == 0:
print » Started Full Screen»
rpistr = «raspivid -t 0 -vf -h 480 -w 800»
p=subprocess.Popen(rpistr,shell=True, preexec_fn=os.setsid)
run = 1
while GPIO.input(RearView_Switch)==0:
time.sleep(0.1)
if GPIO.input(RearView_Switch)==0 and run == 1:
os.killpg(p.pid, signal.SIGTERM)
print » Started Full Screen Transparent»
rpistr = «raspivid -t 0 -vf -op 128 -h 480 -w 800»
p=subprocess.Popen(rpistr,shell=True, preexec_fn=os.setsid)
run = 2
while GPIO.input(RearView_Switch)==0:
time.sleep(0.1)
if GPIO.input(RearView_Switch)==0 and run == 2:
os.killpg(p.pid, signal.SIGTERM)
print » Started PIP Right side»
rpistr = «raspivid -t 0 -vf -p 350,1,480,320»
p=subprocess.Popen(rpistr,shell=True, preexec_fn=os.setsid)
run = 3
while GPIO.input(RearView_Switch)==0:
time.sleep(0.1)
if GPIO.input(RearView_Switch)==0 and run == 3:
print » Stopped »
run = 0
os.killpg(p.pid, signal.SIGTERM)
while GPIO.input(RearView_Switch)==0:
time.sleep(0.1)
# Estos tres bloques siguientes alternan entre las tres configuraciones de brillo.
if GPIO.input(Brightness_Switch)==0 and bright == 0:
print «Setting Brightness to 255»
subprocess.call («/usr/local/bin/backlight.sh 255», shell=True)
bright = 1
while GPIO.input(Brightness_Switch)==0:
time.sleep(0.1)
if GPIO.input(Brightness_Switch)==0 and bright == 1:
print «Setting Brightness to 128»
subprocess.call («/usr/local/bin/backlight.sh 128», shell=True)
bright = 2
while GPIO.input(Brightness_Switch)==0:
time.sleep(0.1)
if GPIO.input(Brightness_Switch)==0 and bright == 2:
print «Setting Brightness to 20»
subprocess.call («/usr/local/bin/backlight.sh 20», shell=True)
bright = 0
while GPIO.input(Brightness_Switch)==0:
time.sleep(0.1)
except KeyboardInterrupt:
print » Quit»
GPIO.cleanup()
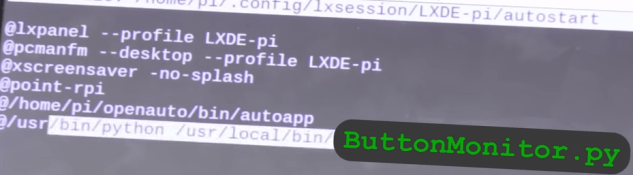
Respecto a la activación ,para probar la camara ejecutar ButtonMonitor.py. Ahora una vez probado , tenemos que hacer que se ejecute automáticamente . Para ello tenemos que editar el archivo /home/pi/.config/lxsession/LXDE-pi/autostart
En la ultima linea del script añadir /usr/local/bin/ButtonMonitor.py
IMPORTANTE : Deberemos copiar los tres scripts a la ruta /usr/local/bin y conceder los permisos de ejecución mediante el comando sudo chmod +x . La fuente original de los scripts es :https://gist.github.com/Everlanders
En el siguiente vídeo podemos ver todo el proceso de creación de un dispositivo basado en Raspberry PI para uso exclusivo en un vehículo usando todos los componentes mencionados anteriormente.



![IMG_20180120_162125[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180120_1621251.jpg?w=424&h=318)
![IMG_20180120_162216[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180120_1622161.jpg?w=383&h=287)
![IMG_20180120_162249[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180120_1622491.jpg?w=431&h=575)
![IMG_20180120_162352[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180120_1623521.jpg?w=503&h=377)
![IMG_20180120_163331[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180120_1633311.jpg?w=640)
![IMG_20180120_165205[1].jpg](https://soloelectronicos.com/wp-content/uploads/2018/01/img_20180120_1652051.jpg?w=640)

Debe estar conectado para enviar un comentario.