Reparación de un Netduino + que no responde («bricked»)
Si nuestro Netduino no responde al intentar desplegarle nuevo software con Visual Studio c# , deberíamos probar con la herramienta MDFDeploy (inicio> Programas> Microsoft. NET Micro Framework 4.1> Herramientas> MFDeploy.exe)
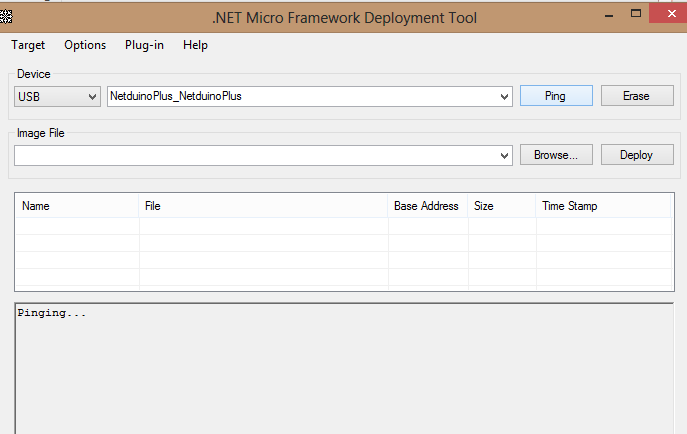
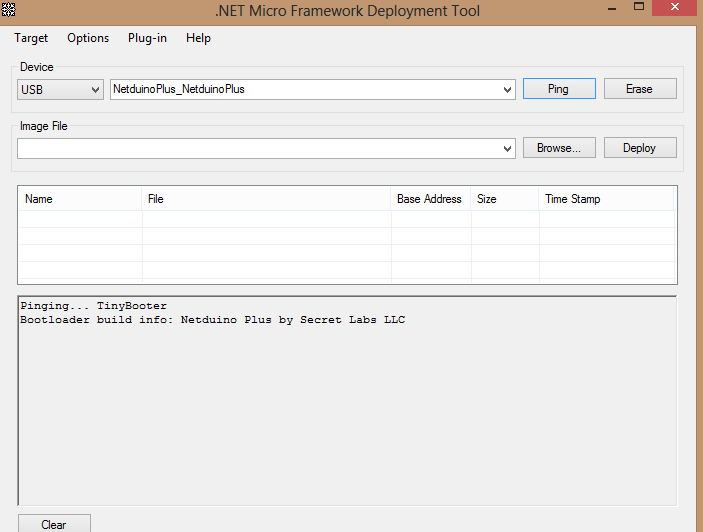
Para ello estando conectado nuestro Netduino por usb a nuestro PC , una vez nos aparezca nuestro Netduino Plus en el check , al pulsar sobre Ping , este deberia responder a los pocos segundos con el mensaje «TinyBooter»
Si no es el caso, como en la pantalla de más abajo , probablemente no podrá cerrar el mdfdeploy por lo habrá que hacerlo forzando el cierre desde el administrador de programas
Paso 1:
– Poner en marcha las herramientas MFDeploy (botón Inicio> Programas> Microsoft. NET Micro Framework 4.1> Herramientas> MFDeploy.exe
– Seleccione «USB» como el transporte en MFDeploy. Y a continuación, seleccione su Netduino si no está ya seleccionada

Paso 2:
– Desconecte el Netduino de su conexión USB (y también de la alimentación externa si se estuviese alimentado así).
– Mantenga pulsado el pulsador de su Netduino mientras que conectarlo a su PC, lo que lo pone en «pre-boot».
-Cuando sus reaparece Netduino en el dispositivo MFDeploy desplegable, pulse el botón PING. Su Netduino debe responder con «TinyBooter».
Paso 3:
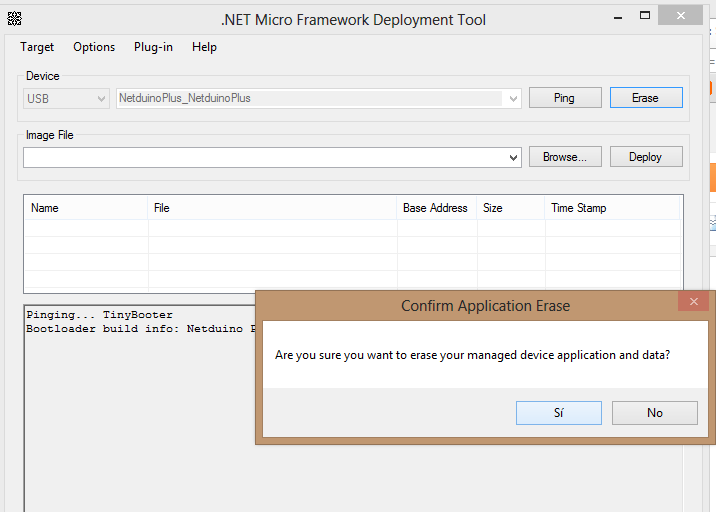
– Dentro de los 20 segundos, pulse el botón ERASE, lo que eliminará la actual aplicación Netduino de tu Netduino.
– Desconecte el cable usb y vuelva a conectarlo el Netduino (saldrá de pre-boot mode) y vuelva a comprobar si reaccciona al Ping
Y ahora a continuación describimos otros problemas que podríamos tener con nuestro Netduino.
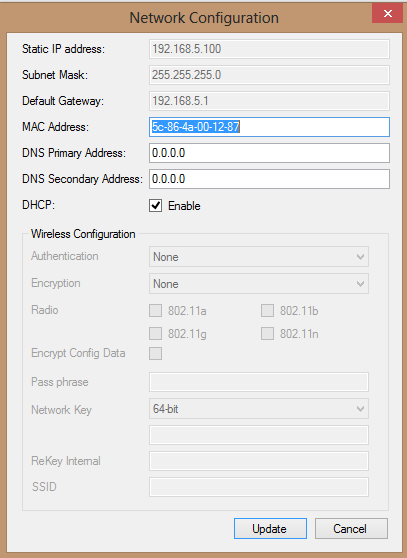
Habilitar DHCP
No dé por sentado que DHCP está habilitado – que no estaba en mis tablas. Para comprobarlo:
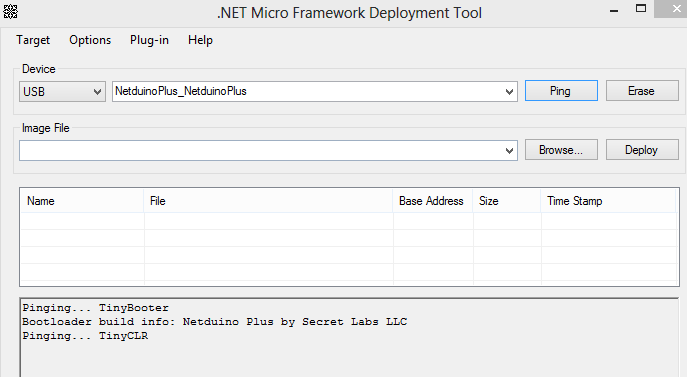
– Comience MFDeploy y ping en el dispositivo para asegurarse de que está ahí. Debe decir ping … TinyCLR. Si noy seguir el procedimiento anterior
– Vaya a Target> Configuración> Red y asegúrese de que DHCP está habilitado. Actualizar el dispositivo
– Power es cycyle quitando y reinsertando el cable USB y espere cinco segundos. El hacer un ping de red y puedes volver a intentarlo.
(Parece que tiene que hacer el Ping primeros en hacer que la pantalla de red funciona.)
Actualización del firmware
Esto debería funcionar al hacer ping a la unidad recibe la resposne … TinyBooter. Si no utiliza SAM-BA.
Desactive cualquier aplicación de reiniciar con el botón de abajo y golpeando Erase primero.
Los usuarios de la versión de firmware 4.1.0.5 o anteriores pueden actualizar a este nuevo firmware con la herramienta MFDeploy:
1. Descargar y descomprimir el archivo adjunto a un directorio en el equipo.
2. Ejecutar MFDeploy.exe. y conectar el Netduino Plus a su PC usando un cable Micro USB.
3. Haga clic en «Examinar …» y seleccione ambos archivos descomprimidos en el directorio tinclr.hex (ER_CONFIG y ER_FLASH). La orden no parece importar.
4. Pulse el botón «Deploy». Tomará unos minutos para actualizar su Netduino Plus.
5. Seleccione el Destino> Configuración> menú de red. Vuelva a introducir los ajustes de la dirección IP y la dirección MAC. Vamos a tratar de eliminar este paso en el futuro.
Una vez iniciado,> será borrado de flash (50 secs)> Deploy ER_Flash (120 segundos) Aplicación> Ejecutar (que normalmente tarda una eternidad)
Reflasheando con nuevo Firmware
Para saber más pulse aqui
solo-electronicos por Carlos Rodriguez Navarro se encuentra bajo una Licencia Creative Commons Atribución-NoComercial-CompartirIgual 3.0 Unported.

Debe estar conectado para enviar un comentario.