Mucho antes que aparecieran los coches autónomos , por su simplicidad destacar que ya existían múltiples soluciones para embarcaciones autónomas que no dependen del ser humano para moverse por el mundo
Leo Megliola, estudiante de 8 grado invirtió un año construyendo una embarcación autónoma con ayuda de la academia de Berwick Academia y su mentor Jeff gum
El kayak era la octava tentativa de conseguir una embarcación autónoma así que buscaba desapoderadamente una idea innovadora para conseguir el objetivo de construir una embarcación autónoma
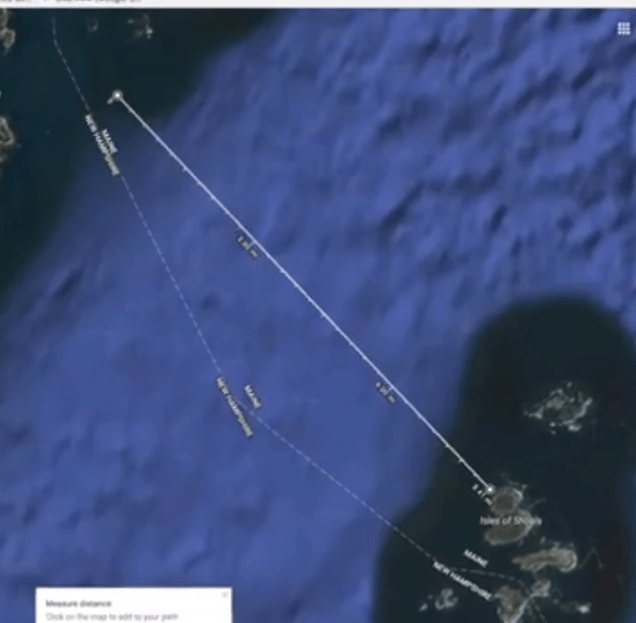
La idea de usar el kayak vino en de forma accidental de un paseo con su padre donde miraban a un isla que estaban a unas seis millas de distancia de ellos , y el padre le preguntó si tuviese que enviar algo a esa isla como lo haría . En principio Leo pensó en un cohete de globo o incluso un avión de ala fija, pero decidió que la manera más eficiente sería por barco, así que decidió intentar nuevamente si proyecto esta vez centrándose en usar un kayak que debería viajar todo el camino a Shoals totalmente sin ayuda.
El autor eligió una trayectoria desde una boya en el mar cerca Portsmouth a otro justo en frente de Appledore Island constituyendo un viaje de poco más de cinco millas
El diseño de piezas utiliza la fusión en una impresora 3d para crear un prototipo , probando cada subsistema individualmente para aprender cómo cada pieza trabaja antes de intentar instalarlos en ambos sistemas principales
Usa obviamente electrónica tanto para el control de dirección como para la propulsión , y la verdad que en el vídeo vemos como va adelante rápidamente dirigiéndose a su destino así que todos esos tres sistemas son buenos y probados
Nos cuenta que la primera vez que probó el sistema pudo ver un controlador de motor paso a paso lleno de humo , pero como llevaban un Arduino de repuesto realizó la primera prueba sin dirección.
Después corregido el problema hizo más pruebas en la paya pudiendo navegar incluso con corriente y viento, pero lamentablemente empezaron los problemas de filtraciones de agua y lentamente se llenaba de agua peligrando la electrónica
Corregidas las filtraciones el siguiente intento conseguir llegar alrededor de la mitad del itinerario , pero el kayak funcionaba perfectamente ,aunque confundió algunas cosas en el código que ejecuta el arduino
Los componentes del kayak son lo siguientes:
- El sistema de propulsión del kayak lo constituye un motor eléctrico de tipo trolling del que hemos hablado en numerosas veces es este blog

- Usa tambien una batería marina AGM de ciclo profundo proporcionando la energía necesaria tanto a la electrónica como al sistema de propulsión

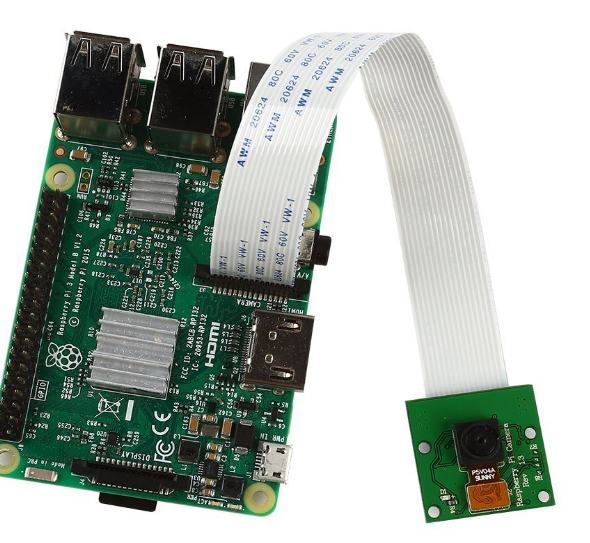
- Un Arduino Uno
- Un modulo GPS
- Dos controladores de motor paso a paso(*)
- Dos relés de potencia consecutivos(**)
(*) En principio pare el timon al llevar dos cables el autor ha debido usar un motor conectado solidariaemnte a cada uno de ellos
(**) Debido a la potencia del motor probablemente el autor ha optado por conectar dos reles en paralelo en lugar de un único relé
Como era de esperar , Arduino es responsable de dirigir el barco y encender y apagar el motor, así como navegar en función de las señales NMEA que proporciona el escudo GPS
Cuenta con dos motores paso a paso que van girando en un sentido o en otro para mover el timón de la embarcación . El autor ha optado para no estropear la embarcación, situando los motores para controlar la dirección a una distancia adecuada para por medio de dos cables de acero tirar de cada extremo del timón hacia estribor o babor y no dirigir la dirección del barco entero pues el uso de la palanca ayuda a minimizar el consumo del motor de dirección
En la electrónica, el GPS es responsable para decirle al kayak qué dirección está viajando calculando el por medio del microcontrolador Arduino las ordenes a dar al motor PaP en en función de las señales que está recibiendo dado que no cuenta con brújula electrónica
El algoritmo inicial tenia en cuenta donde estaba hace unos segundos y donde está en el momento actual de modo que podía calcular de que manera se había movido sabiendo qué camino estába viajando bien, así que fruto de la experimentación consiguió escribir el programa adecuado para ir corrigiendo constantemente el rumbo para llegar al destino
El autor tubo algunos problema a la hora sobre todo de escribir el código principalmente por tres motivos principales:
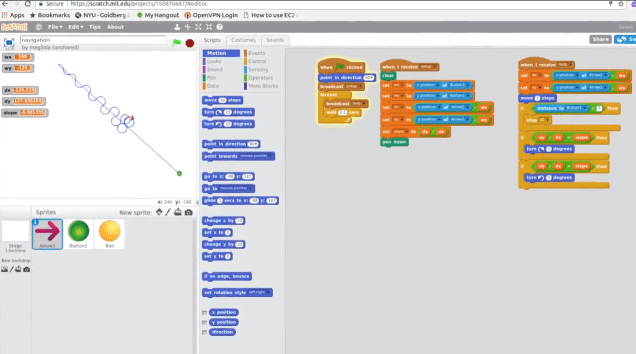
- Primero el autor falló en simulación de scratch donde tuvo la pequeño barco y la isla y nosotros fundamentalmente los rudimentos de la código que escribimos en Arduino idioma y se movió mucho y luego terminó simplemente haciendo un círculo una y otra vez para que ese total falló y terminamos arreglando que reescribió completamente el código y tomó enfoque diferente
- El segundo fracaso vino que trataron de navegar en el coche usando la misma electrónica pero a la que añadieron cuatro LEDs que indicaba de qué manera había que dar la vuelta si el circuito sabe de alguna corrección GPS , así como si se estaba dentro del rango para detener o no . Por el resultado comprobado empíricamente, el algoritmo estaba mal ,pues indicaba que estaba completamente fuera de la distancia cuando en realidad estában a unos cien metros de distancia y dijo que está en algún lugar en el rango de cinco mil metros de distancia..
- El tercer fallo vino con una de las revisiones de código cuando íba hacia el norte pues en el código estaba dividiendo por cero y perdía el control .Arreglo eso también tomando una nuevo enfoque completamente nuevo de modo que finalmente consiguio solucionar el problema incluso en una corriente cruzada como se puede ver en el vídeo .
El autor ha utilizado componentes y tutoriales principalmente de Adafruit, incluyendo un Arduino, un sensor GPS, un relé y un controlador de motor paso a paso y para programarlo ha usado Scratch
De momento aquí os dejamos un vídeo en el que nos enseña su proyecto aunque lamentablemente no ha compartido el código de Arduino .
Nos consta que has seguido intentando mejorar su proyecto como demuestra el siguiente vídeo donde el kayak de Leo adquiere y encuentra una boya de mar a 1,5 km de distancia (prueba de mar abierto) siendo el rumbo inicial de 120 grados respecto al objetivo.



Debe estar conectado para enviar un comentario.