Si alguna vez has querido fabricar tus propias placas de circuito impreso sin lidiar con productos químicos o procesos complejos, el método que te voy a contar puede interesarte. Se trata de combinar una impresora 3D con cinta de cobre conductora para obtener PCBs funcionales, con formas personalizadas y sin necesidad de taladrar después. A continuación te explico todo el proceso paso a paso, desde el diseño electrónico hasta el montaje final.
El método en resumen
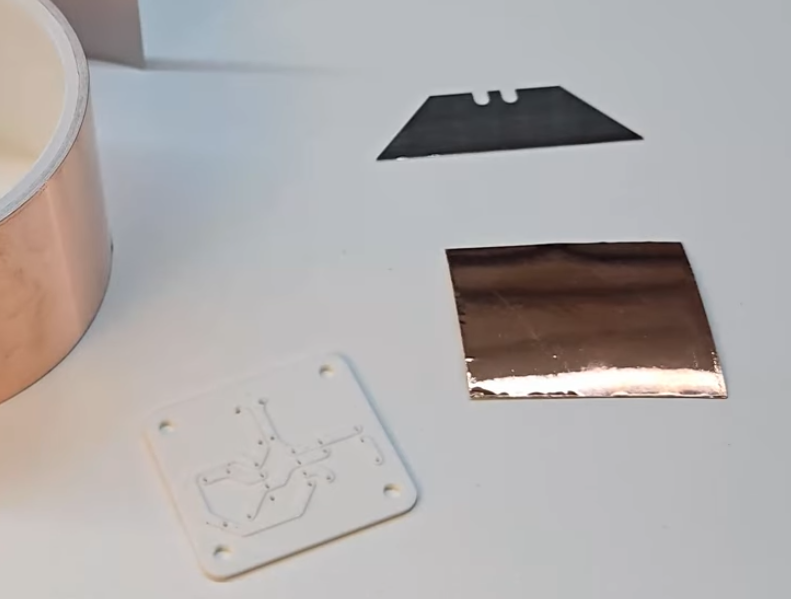
La idea es sencilla: en lugar de grabar cobre sobre una baquelita, imprimimos en 3D una estructura plástica que hace de sustrato. Sobre ella, aplicamos el cobre autoadhesivo (comercialmente se vende en forma de cinta o en planchas de cobre) siguiendo los recorridos de las pistas. Los taladros para los componentes se diseñan directamente en el modelo 3D, y los cruces de pistas se resuelven con pequeños puentes de cable. El resultado es una placa de una sola cara, con buena conductividad y sin necesidad de vías.
Diseño electrónico en EasyEDA
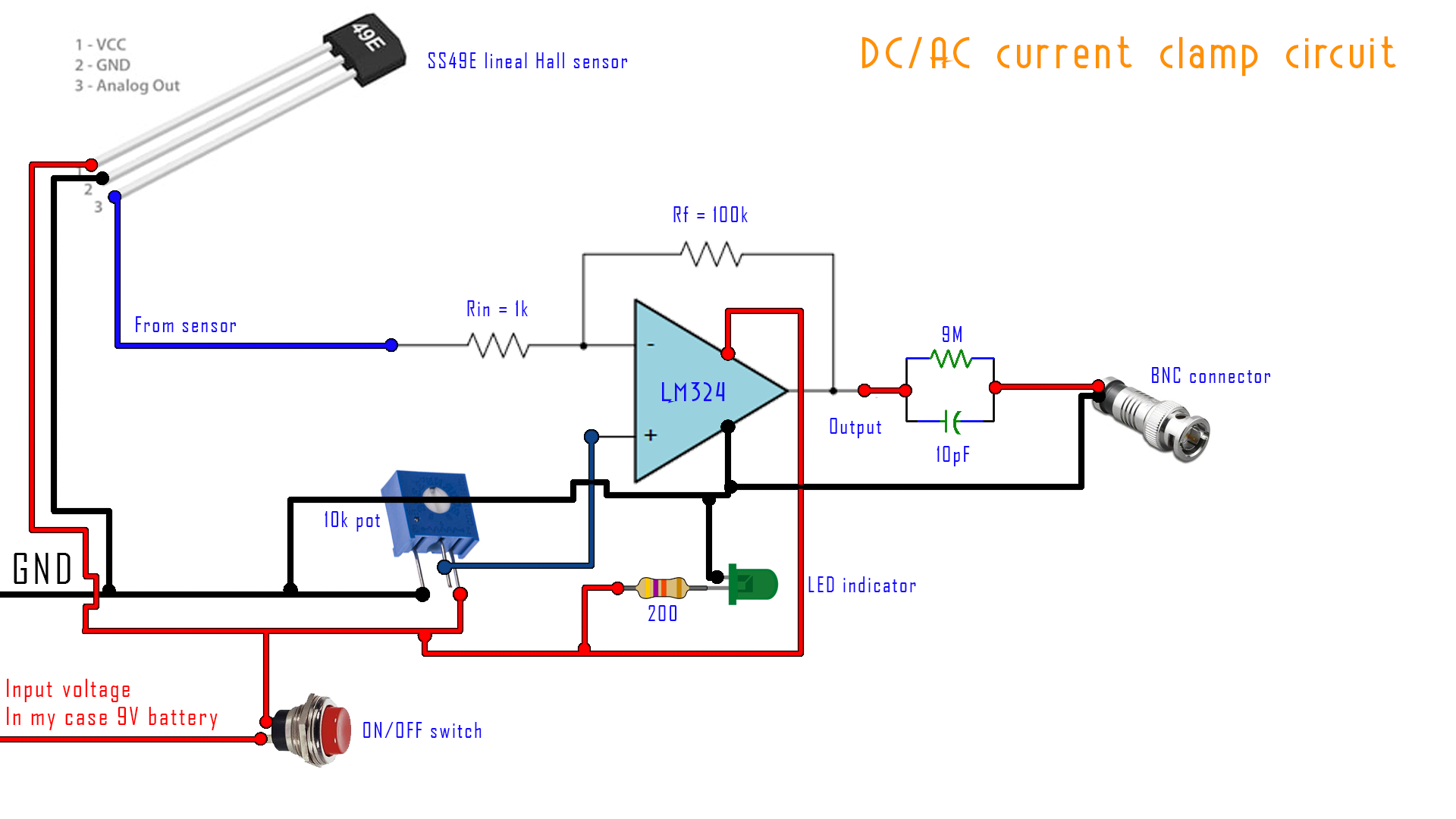
El punto de partida es el diseño del circuito en EasyEDA. Aquí hay que tener en cuenta que trabajaremos con una sola capa, por lo que conviene configurar las reglas de diseño con unos valores específicos. Para el ancho de pista usaremos 2,5 mm como valor preferido, con un mínimo de 2 mm. El espaciado entre pistas debe ser de al menos 1,5 mm para evitar cortos accidentales. Las vías se deshabilitan por completo, tanto en diámetro como en taladro, ya que no las vamos a usar.
Es importante rutear manualmente, forzando todo en la capa inferior (BottomLayer). Si hay cruces inevitables, podemos utilizar resistencias de 0 o pequeños jumpers que luego implementaremos físicamente con cable. Al finalizar, exportamos la capa de cobre como imagen o archivo DXF a escala 1:1, y también generamos la lista de taladros para tener las posiciones exactas.
En resumen esta es la configuración de reglas de diseño para EasyEda:
| Parámetro | Valor | Motivo |
|---|---|---|
| Track Width | 2.5 mm (preferido) / 2.0 mm (mínimo) | Ancho suficiente para cinta de cobre |
| Clearance | 1.5 mm | Separación entre pistas para evitar cortos |
| Via Diameter | 0 mm (o el mínimo admitido) | No se usan vías (se reemplazan por puentes) |
| Via Drill Diameter | 0 mm ( o el mínimo admitido) | No se usan vías |
| Routing Layers | Solo BottomLayer | Diseño de una sola cara |
| Permitir vías | NO | Forzar diseño sin vías |
Nota : ciertamente EasyEDA por defecto no permite una sola capa de PCB, pero siempre intentara el autoroute minimizar el numero de capas por lo que si es posible usara una sola capa. además por supuesto también podemos probar a hacer el ruteo manual. Por otro lado , también seria factible mediante este método fabricar PCB de doble cara siempre que el lado de los componentes se puedan disponer estos
Diseño del modelo 3D
Con la referencia del layout pasamos al modelado 3D, por ejemplo en Fusion 360 o SolidWorks. Creamos una base de 2 mm de espesor que será el cuerpo de la placa. Sobre ella, dibujamos los canales que seguirán las pistas, con una profundidad de 0,5 mm. El ancho de estos canales debe ser ligeramente mayor que el de la cinta, así que si usamos cinta de 2,5 mm, haremos canales de 2,7 mm.
Los taladros para los componentes se modelan directamente como cilindros que atraviesan toda la base. Los diámetros dependen del componente: para resistencias y diodos usaremos 0,9-1,0 mm; para condensadores electrolíticos y pines de cabecera, entre 1,0 y 1,2 mm; y para terminales de tornillo o conectores grandes, hasta 2,0 mm.
En cada taladro también diseñamos un área hundida que actuará como pad. Se trata de un círculo de 3 mm de diámetro con una profundidad de 0,5 mm, concéntrico con el taladro. El canal de la pista debe conectar con el borde de este pad para que la cinta llegue hasta allí sin escalones.
Para los cruces de pistas que no se pudieron resolver en el diseño, modelamos puentes integrados. La opción más práctica es crear dos taladros pequeños de 0,8 mm separados entre 5 y 10 mm, unidos por un canal superficial de 0,5 mm de profundidad. Por ahí pasaremos un cable de cobre estañado que soldaremos en ambos extremos.
Resumen estructura de la placa (parámetros en CAD)
| Elemento | Dimensión | Función |
|---|---|---|
| Base estructural | 2.0 mm de espesor | Rigidez y soporte |
| Canales para pistas | 0.5 mm profundidad | Guiar y alojar la cinta de cobre |
| Ancho de canal | Track Width + 0.2 mm | Holgura para la cinta |
| Pared entre canales | 1.5 mm (Clearance) | Aislamiento entre pistas |
Resumen taladros para componentes (THT)
| Componente | Diámetro de taladro |
|---|---|
| Resistencias, diodos | 0.9 – 1.0 mm |
| Condensadores electrolíticos | 0.8 – 1.2 mm |
| ICs DIP, header pins | 1.0 – 1.2 mm |
| Terminales de tornillo | 1.5 – 2.0 mm |
Todos los taladros deben atravesar completamente la base (2.0 mm)
Resumen pads para soldadura
- Área hundida: 3.0 mm de diámetro, 0.5 mm de profundidad
- Taladro central: según componente
- Conexión: El canal de pista debe conectar con el borde del pad
Impresión 3D de la placa
A la hora de imprimir, elegimos un filamento aislante como PLA, PETG o ABS. Es recomendable usar una altura de capa de 0,12 a 0,16 mm para que los taladros y canales queden bien definidos. La orientación debe ser con los canales hacia arriba, y no serán necesarios soportes si los taladros son verticales. Tras la impresión, verificamos que todos los taladros estén abiertos y limpiamos los canales de posibles rebabas con una lija fina o un cúter.
Parámetros de impresión
| Parámetro | Valor |
|---|---|
| Filamento | PLA, PETG o ABS (aislante) |
| Altura de capa | 0.12 – 0.16 mm (para precisión en taladros) |
| Boquilla | 0.4 mm |
| Relleno | 20-40% (100% en zonas de pads opcional) |
| Orientación | Canales y pads hacia arriba |
| Soportes | No necesarios para taladros verticales |
Aplicación de la cinta de cobre
La cinta de cobre debe tener adhesivo conductor para garantizar la continuidad eléctrica. Los anchos más prácticos son 3 mm o 5 mm, aunque podemos cortar tiras más estrechas si es necesario. Colocamos cada tramo de cinta dentro de su canal correspondiente, presionando bien con una espátula o un palillo de bambú para que se adhiera en curvas y esquinas. En los pads, dejamos que la cinta cubra toda el área hundida. Si dos tramos de cinta deben unirse, soldamos la superposición para asegurar la continuidad.
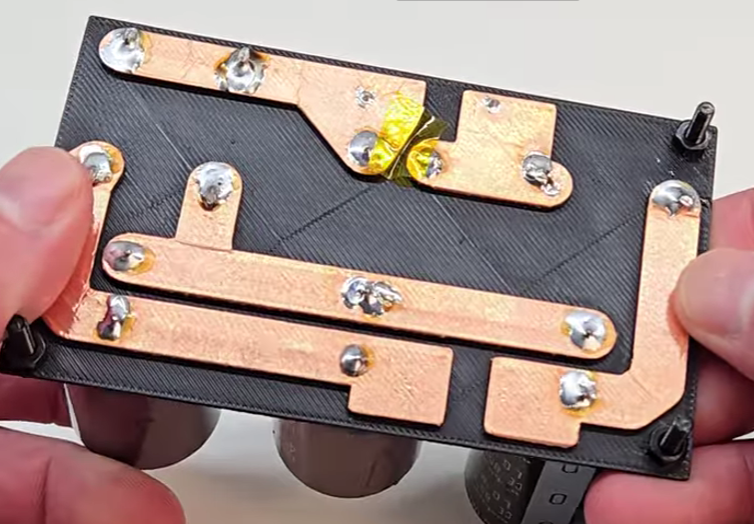
Instalación de puentes y componentes
Los puentes de cable se montan primero. Insertamos un cable de cobre estañado de 0,5 a 0,8 mm en los dos taladros diseñados para ello, y soldamos ambos extremos sobre la cinta de cobre. El cable debe quedar alojado en el canal superficial para que no sobresalga.
A continuación colocamos los componentes. Si son THT (de agujero pasante), insertamos los pines en sus taladros y soldamos cada uno al pad de cinta. Para componentes SMD, los situamos sobre los pads y soldamos directamente con estaño. Es conveniente usar fundente para facilitar la soldadura, especialmente porque la cinta de cobre disipa calor rápidamente y requiere algo más de tiempo con el soldador.
Pruebas y acabado final
Antes de dar por terminada la placa, hacemos una comprobación con el multímetro: verificamos la continuidad de cada pista y nos aseguramos de que no haya cortos entre pistas adyacentes. Si todo está correcto, podemos aplicar una capa de barniz aislante para proteger las pistas de la humedad o de posibles contactos accidentales. También podemos diseñar e imprimir una tapa que encaje sobre la placa si el proyecto lo requiere.
Ventajas y limitaciones del método
Este sistema tiene varias ventajas interesantes. La conductividad es excelente por ser cinta de cobre, no se utilizan productos químicos ni procesos de grabado, y los taladros ya vienen integrados en la impresión, ahorrando trabajo de mecanizado. Además, podemos dar formas complejas a la placa e incluso integrar soportes o carcasas en un mismo conjunto impreso.
Como limitaciones, el ancho mínimo de pista es de unos 2 mm, lo que impide trazos muy finos. No es adecuado para circuitos de alta frecuencia, y la corriente máxima que puede manejar una pista de 3 mm de ancho ronda los 2-3 amperios. Por último, el proceso requiere paciencia en el montaje manual, aunque el resultado es muy gratificante.
Con este método puedes obtener PCBs completamente funcionales en tu propio taller, combinando la precisión de la impresión 3D con la fiabilidad del cobre. Si te animas a probarlo, verás que es una alternativa muy práctica para prototipos o para proyectos que requieren formas personalizadas.

Debe estar conectado para enviar un comentario.