Cada vez se nos pone mas sencillo interactuar con el mundo físico , no solo desde el punto de vista de complejidad, sino también debido a la simplicidad conseguida gracias a la elevada miniaturización, lo cual que se suele traducir en precios muy bajos y diseños sencillos, especialmente en la parte de la electrónica necesaria.
Como ejemplo usando Arduino se pueden construir muchos tipos de proyectos CNC gracias al ingenio de muchas personas así como la ayuda de la electrónica necesaria que puede condensarse simplemente en este escudo con el que se pueden controlar por medio de un Arduino 3 motores paso a paso gracias a que los propios módulos de controladores pueden insertarse en cada zócalo proporcionando así la capacidad al eje motor de impulsión 3 motores paso a paso (X, Y y Z).
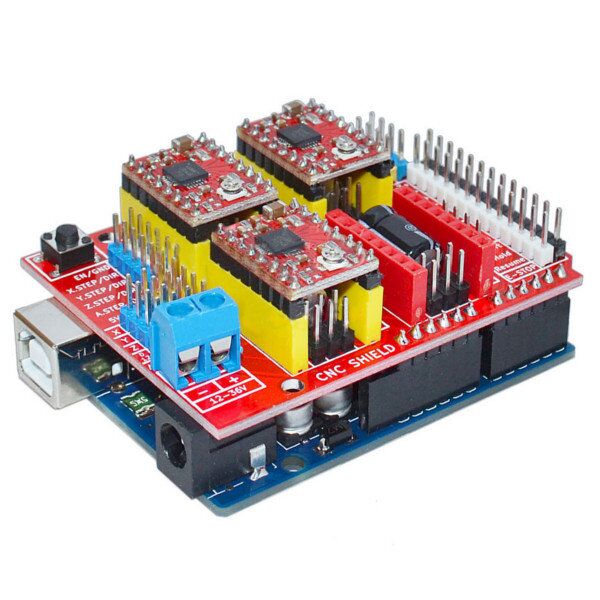
En este escudo para Arduino, los motores paso a paso se pueden conectar con conectores molex de 4 pines o también se pueden soldar los cuatro hilos de cada motor directamente al conector en su lugar
A propósito de las conexiones soldadas del motor : la conexión o desconexión de los cables de un motor paso a paso mientras el driver está alimentado puede destruir al driver (por ejemplo soltando por accidente algún hilo, cruzando entre si hilos , etc) así que es buena idea que los cables de los motores estén sólidamente conectados a la placa.
Asimismo al igual que otras controladoras, esta placa se alimenta aparte de la fuente de Arduino con una tensión continua entre 12-36V DC. En este punto es de destacar que por el momento sólo los controladores DRV8825 pueden manejar hasta 36V , por lo que considere un voltaje de funcionamiento menor para alimentar al escudo.
Respecto a los drivers de cada motor como se puede ver en la foto , son enchufables para facilitar su remplazo en caso de avería o fallo y están basados en controlados de motores paso a paso del tipo A4988 o DRV8825. Cada driver incluye puentes para configurar el Micro-Stepping para los controladores paso a paso con cinco modos de paso seleccionables: full, 1/2, 1/4, 1/8 y 1/16. (algunos controladores como el DRV8825 pueden hacer hasta 1/32 micro-stepping)
Resumidamente estas son las características de este nuevo escudo controlador multi-driver:
- Compatibilidad con Arduino GRBL
- Baja salida RDS (On)
- Se puede utilizar para una máquina de grabado
- Es compatible con GRBL 0.9 (Firmware de código abierto que se ejecuta en un Arduino UNO que convierte los comandos de código G en señales para los motores paso a paso)
- Soporte de 4 ejes (X, Y, Z, A-Puede duplicar X, Y, Z o hacer un 4to eje completo con firmware personalizado usando los pins D12 y D13)
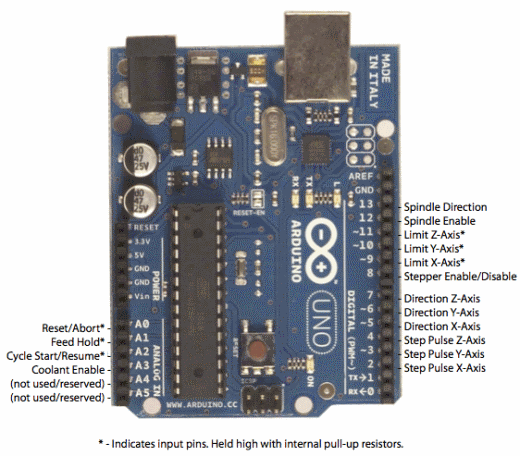
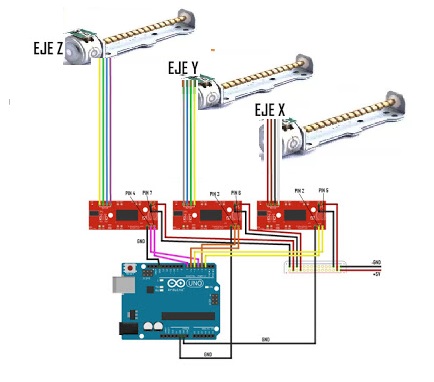
En la siguiente imagen de un Arduino vemos la correspondencia con los pines del escudo para el control de los tres motores:.
Excepto todos los pines citados , este escudo ( Arduino CNC Shield V3.0 ) contiene otros pines que admiten más funciones:
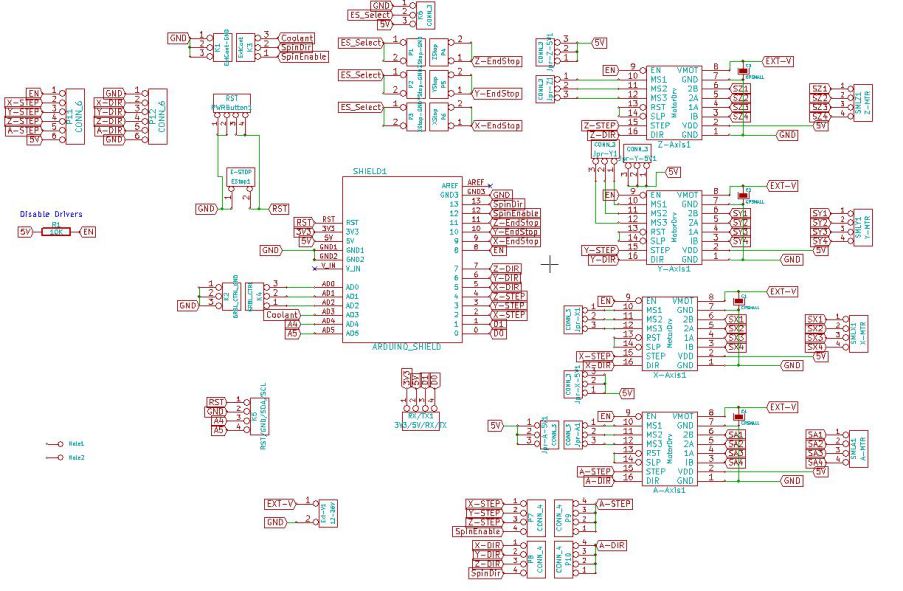
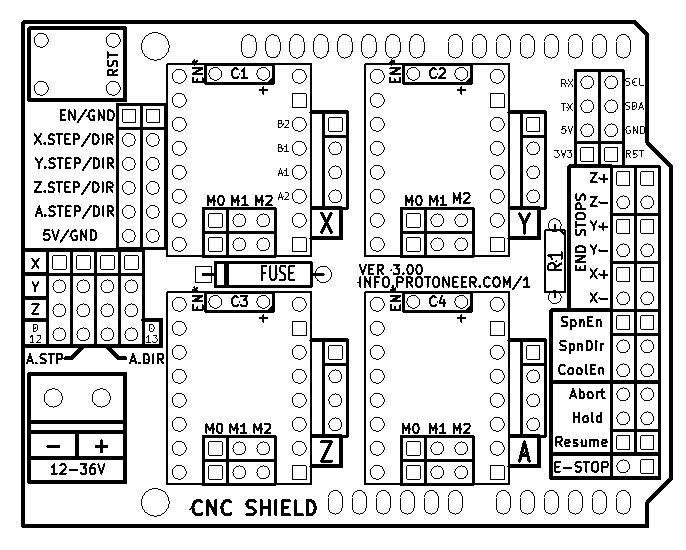
Las funciones de los pines extras son los siguientes:
- Interruptor de límite de pines ha sido duplicado por que cada eje tenga un «Top / +» y «fondo /-«. Esto hace más fácil de instalar dos interruptores de límite para cada eje.(usar con un interruptor normalmente abierto)
- EStop – estos pines se pueden conectar a un interruptor de parada de emergencia. Esto hace lo mismo que el botón RESET en la placa Arduino. ( también puede ser instalado un botón adicional de emergencia que corta la corriente a toda la maquinaria. )
- Control del husillo y el refrigerante tiene sus propios pins.
- Comando Pin externos GRBL se han quitado lo que le permite añadir botones de pausa/espera, reanudar y abortar.
- Los pines serie (D0-1) y los de I2C (A4-5) tienen su propia salida para futuras ampliaciones. Por ejemplo I2C se podría implementar software para controlar cosas como la velocidad del huso o control del calor.
- Versión 3.00 añadió unos jumpers para configurar el eje 4 (clon el otro eje o pin D12-13), comunicaciones (RX+TX, I2C) y una cabecera de control paso a paso (todos los pines necesitan para ejecutar 4 steppers)
Instalación de hardware
Se deben observar las siguientes advertencias:
- Inversión de la polaridad de la alimentación o conectar incorrectamente la energía destruirá el escudo
- Siempre asegúrese de insertar conexiones en la a orientación correcta y en la toma adecuada correctamente
- El escudo de CNC Arduino es compatible con fuentes de alimentación hasta 36V. Eso significa que todos los drivers de chip paso a paso NO se deben alimentar con ese valor pues controladores A4988 no están diseñados para funcionar a 36V de modo que si lo alimenta con ese valor puede destruirlos. Alimentación de 36V son para los drivers como la Pololu DRV8825 que pueden funcionar con + 36V
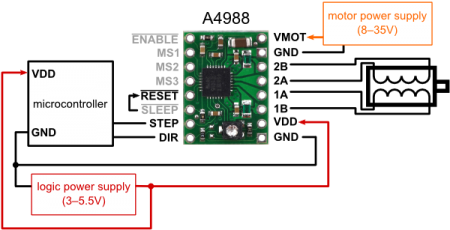
ESQUEMA CONEXIONES PARA MODULO A4988
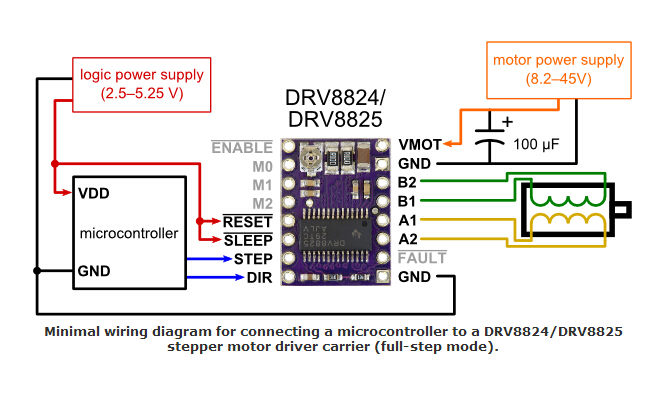
ESQUEMA CONEXIONES PARA MODULO DRV8824/DRV8825
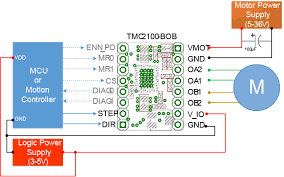
ESQUEMA CONEXIONES PARA MODULO TMC2100
Instalación del software
1) Obtener código GRBL en Arduino
Descargar el código GRBL desde enlace:grblmain.zip descomprimir el archivo y copiar a la carpeta de las bibliotecas de arduino IDE, haga clic en abierto arduino IDE File -> ejemplos -> grblmain -> GRBLtoArduino, elegir la mesa correcta y COM, luego cargar el código de GRBLtoArduino a UNO
2) Instalar software de controlador grbl
Descargar software de controlador grbl desde enlace:GrblController.exe , descarga e instala, abra el software de controlador grbl como sigue

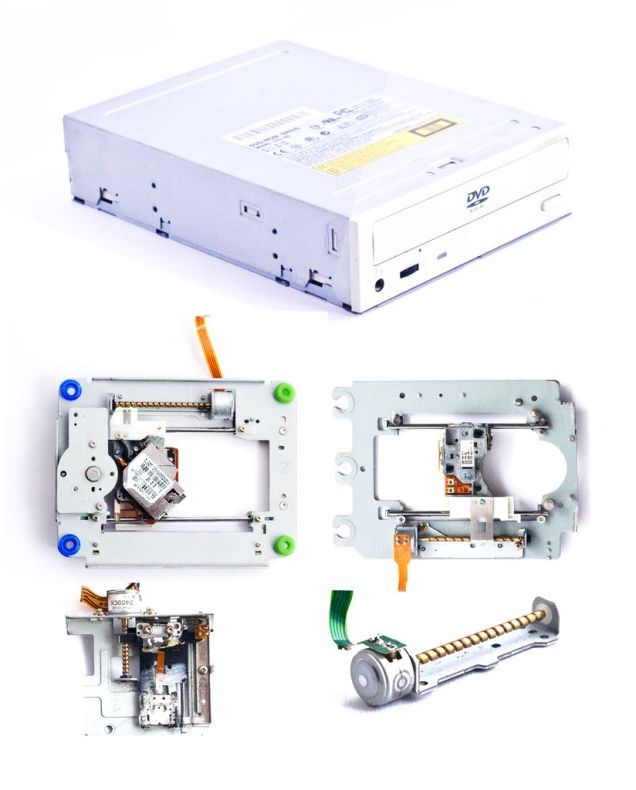
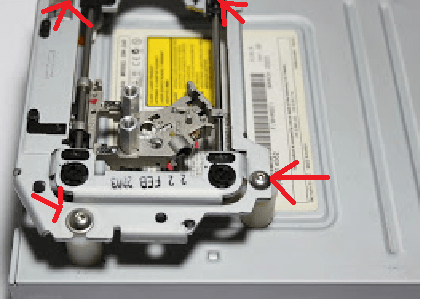
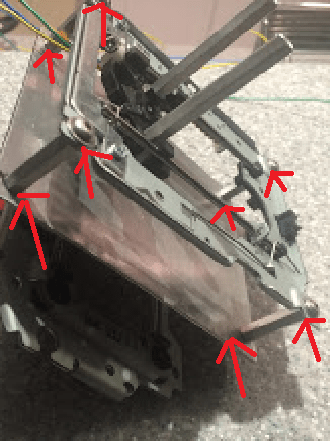
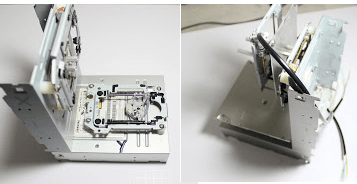
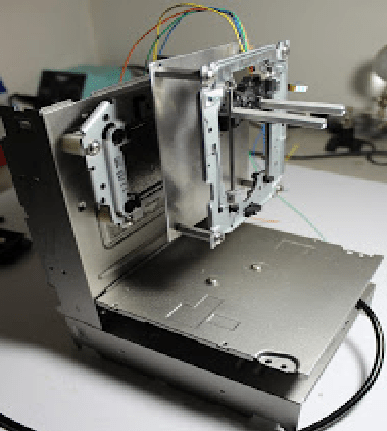
Conectar el Arduino UNO al PC con cable USB, seleccione el puerto correcto, ajustar la velocidad de Baute como «9600», haga clic en «Abrir», una vez conectado, el botón «Abrir» cambiará a «Cerrar/Reset» con color de fondo rojo. Haga clic en «seleccionar archivo» para seleccionar el archivo, haga clic en «Begin» para empezar a el grabado (si es que los motores están configurados en una maquina CNC al que se haya acoplado un diodo láser como por ejemplo esta maquina hecha con piezas de CD’s )


Debe estar conectado para enviar un comentario.