Hay muchas, muchas maneras de hacer una placa de circuito impreso o en ingles «PCB»(printed circuit board) . Sin embargo, incluso con la práctica, la calidad del resultado varía mucho con el proceso y el equipo utilizado.
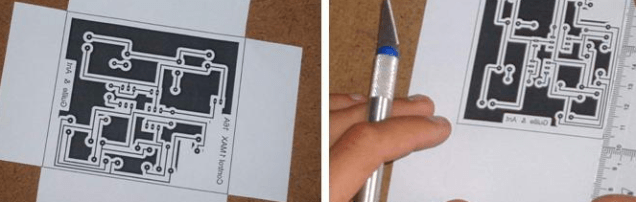
Antiguamente el diseño se calcaba en un papel de acetato y se usaba placas fotosensibles exponiéndolas a una luz intensa, pero modernamente se imprime el diseño con una impresora láser con tóner negro, o bien se fotocopia el mismo en un papel grueso.
Una vez tenemos la plantilla recortaremos la fotocopia como se indica en la imagen,de esta forma, podremos pegar los bordes a la placa.
Antes de transferir el diseño se recomienda proceder al limpiado de la placa por ejemplo usando lana de acero y acetona (este proceso debe ser llevado lo mejor posible, ya que si la placa no queda bien limpia nunca fijara el tóner el la misma). Al terminar de limpiar secaremos la placa con un paño limpio y volveremos a limpiarla sin poner mas los dedos sobre el cobre, ya que estos dejan grasa:la limpieza de la placa solo será efectiva cuando esta quede brillante y con rayones en circulo para que agarre mejor el tóner.
En el instante que se retira la plancha de la placa, después de 1 o 2 minutos de calor intenso, a veces mas, se coloca la placa en un recipiente con agua para que el papel no tire (suelte) el tóner hacia arriba al enfriarse y se fije a la placa, esta debe mantenerse en el agua durante unos 5 minutos.
Una vez limpia la placa colocaremos la plantilla con el lado de la tinta hacia el cobre y con la plancha a tope de calor, se le aplica a la placa Es importante insistir con el calor por toda la placa y con vapor humedeciendo el papel para que no se queme pero sin empaparlo. Si se llegase a empapar, cortar la llave de vapor y dar calor seco unos instantes.
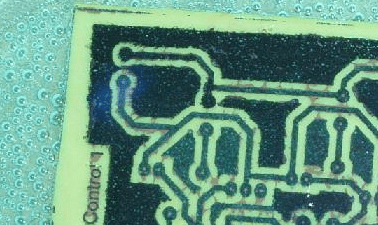
Después de haber esperado 5 o 10 minutos en el agua, sacamos la placa y vamos frotando con los dedos para quitarle el papel que no nos sirve, intentando quitarlo todo, hasta que quede una capa muy fina de papel que se retira con un cepillo de dientes que ya no tengan en uso, con cuidado de no partir el tóner que define las pistas.
Una vez repasadas todas las pistas de la placa con un marcador permanente (tipo edding 3000 o superior), se espera un par de minutos para que este fije y seque. Mientras tanto, podemos ir preparando el ácido para atacar la placa consistente en una mezcla de 2 partes de agua fuerte con 4 de agua oxigenada 110 vol. y 1 de agua ( Atención : sobra decir que se debe tener un cuidado extremo usando guantes y gafas de protección para evitar contactos accidentales en la piel o en los ojos) .
Una vez tengamos la disolución do meteremos la placa en este . Ahora debemos estar mas atentos, pues si el ácido resultara fuerte podría diluir el tóner. Lo ideal es que cuando coloque la placa en disolución, el cobre coja un color rojizo y empiece a burbujear..
Una vez se saque la placa del ácido hay que enjuagarla con abundante agua para que el acido no siga atacando el cobre por lo que conviene secarla con un trapo limpio. Una vez seca, se empapara el toner con acetona y se rascara con un cepillo de dientes o con la lana de acero, eliminando así todo el tóner de la placa y ya solo quedaría hacer los taladros para los componentes con una broca de 1mm.
¿Le parece interesante el proceso de fabricación casera de PCB’s anterior? Pues afortunadamente, los nuevos y mejorados métodos de transferencia de Gerber se han ideado en los últimos años gracias a los hackers en todo el mundo.
Uno de esos hackers, [Henner] está trabajando en un proyecto llamado LDGraphy en un intento de traer el grabado de alta resolución a las masas.
LDGraphy es un dispositivo de láser de litografía que hace uso de un láser y un Beaglebone verde para grabar el diseño en el tablero. La mejor parte es que toda la lista de materiales se dice que cuesta menos de $ 100,o que hace que sea asequible para las personas con un presupuesto ajustado.
El sistema está diseñado alrededor de un láser de 500 mW y un escáner de espejo de polígono destinado a una impresora láser. La placa con fotorresistencia se acciona linealmente en el eje X utilizando un motor paso a paso y el rayo láser que es rebotado del espejo hexagonal giratorio es responsable del eje Y.
El código de tiempo crítico para la Unidad Programable en Tiempo Real (PRU) del procesador AM335X está escrito en ensamblador para la conmutación rápida del láser. El recinto es, naturalmente, un caso de acrílico de corte por láser y está hecho en el espacio de hackers local de [Henner].
[Henner] ha estado trabajando duro calibrando su diseño y compensando las inexactitudes de los componentes utilizados. En el vídeo de demostración a continuación presenta una versión de trabajo con una resolución de 6 mils que es maravilloso teniendo en cuenta el costo de la máquina.
Este proyecto es totalmente Open Source, toda la documentación y código fuente están disponibles en GitHub con un coste total de apenas 100 dólares utilizando mucho material recuperado
Esta no es la primera vez que hemos visto un DIY láser PCB exposer, por supuesto, pero es uno de los mejores documentados.
Por poco razonable que nos pueda resultar, la movilidad eléctrica ha llegado por sus innegables ventajas frente a los clásicos motores de combustión interna , como puede ser la ausencia de emisiones contaminantes, nulo mantenimiento ,altísima fiabilidad ,ni una sóla pieza móvil (nada de correas, filtros, etc que complican la vida), no generan manchas de aceite, no generan gases de escape,sin ruido ni vibraciones, no hay mantenimiento,no hay monóxido de carbono,no hay depósito de combustible ( que por cierto seguirá aumentando de precio) ,etc.
Dentro de la movilidad marina , es normal que el “movimiento a lo eléctrico” también sea seguido con interés por idénticos motivos , en las que como es normal destaca la mayor fiabilidad y el coste de cada milla recorrida frente a los sistemas convencionales ,pero sin olvidar que estaremos ayudando claramente a nuestro planeta siempre que usemos métodos sostenibles para cargar las baterías .
En efecto las bondades de los motores electricos marinos las conocen bien los aficionados a la pesca ya que son indispensables para desplazarse con una embarcación sin ruidos que asusten a peces ,pero la tendencia es tan clara que no solo existen motores para maniobra eléctricos o para pesacar , sino que tambien existen motores marinos completamente operativos para reemplazar todos los motores marinos( es decir tanto intraborda como fueraborda).
Hoy en día ya de hecho existen muchos motores intraborda marinos que se pueden encontrar comercialmente , normalmente para altas potencias diseñados para reemplazar los viejos motores de combustión diesel.
En cuanto a motores intraborda resumidamente estas son algunas de sus características:
Potencias :desde 6 a 100 HP
Alimentación : desde 36v hasta 144V
Corriente : desde 70 hasta 270Amps
Igualmente también existen motores fueraborda eléctricos en un abanico muchísimo mas amplio que los intraborda dada su gran versatilidad . Como característica llamativa suelen incorporar el controlador del motor( normalmente del tipo bruslless ) dentro de la propia carcasa y también suelen ser de menor potencia que los motores intraborda. Incluso hay modelos que incluyen la bateria dentro del propio cuerpo del motor
La potencia de propulsión de estos motores se suele medir en empuje (Fuerza sobre el barco x velocidad del barco) normalmente expresada en libras, siendo lo normal valores desde las 20 libras hasta las 90 libras o más.
Ademas del empuje medido en la hélice , es muy interesante saber otras formas de medir la potencia:
Potencia de entrada:es la potencia consumida por el motor en watios siguiendo la fórmula de la potencia eléctrica P=V*I (intensidad x tensión) . Para motores fueraborda de gasolina y motores fueraborda eléctricos convencionales no se suele indicar la potencia de propulsión pero este parámetro también puede determinarse para los motores fueraborda de gasolina (volumen de paso de gasolina x energía contenida en el combustible).
Potencia en el eje : es la potencia medida en el eje de la hélice .De hecho una medida muy parecida usada para la indicación de potencia de los motores fueraborda de gasolina es el par motor x velocidad angular que se expresa en CV o en kW. No contempla las pérdidas de la hélice, que pueden oscilar entre el 30 y el 80%
Potencia de propulsión:indicación de la potencia en grandes embarcaciones (empuje x velocidad). Se expresa en CV o en kW y contempla todas las pérdidas(incluidas las de la hélice), por lo que indica la potencia efectiva de un motor.
Una gran diferencia frente a los motores térmicos es que los motores eléctricos son capaces de alcanzar la misma potencia de propulsión que los de combustión con una potencia en el eje considerablemente menor porque pueden propulsar las hélices de forma más eficiente debido a que ofrecen una excelente curva del par motor en un intervalo más amplio del régimen de giro , por lo que son ideales para propulsar hélices con eficacia incluso en categorías bajas.
Esta cualidad permite a los motores eléctricos accionar las hélices –incluso en las gamas de potencia más bajas– de manera mucho más eficiente que los motores de combustión. Como consecuencia, es posible que el empuje de la hélice en las categorías bajas de CV sea el triple que el de un fueraborda de gasolina.
Sobre el modo de calcular la equivalencia en CV aplicaremos la formula de la potencia , dividiendo por el equivalente a 1CV(763W) ,multiplicando el resultado pro el rendimiento ( si se conoce)
Es decir por ejemplo para un motor de 12V que consume como máximo 80Amp, su potencia en CV seria:
P= V*I= 12 V x 80 A = 960 W
P(CV)= 960 W / 736 W/CV = 1,3 CV
Ese ultimo resultado se multiplicaría por el rendimiento del conjunto el cual depende claramente de marca modelo del motor:
No se deben usar baterías de arranque de automóvil convencionales con los motores eléctricos fueraborda pues las baterías de arranque están diseñadas para entregar la energía almacenada en breves descargas de alta intensidad que se realizan de manera muy espaciada (justo en el arranque) . Si a una batería de arranque le solicitamos una entrega de por ejemplo, 25 A de manera continuada, esta batería no será capaz de entregarnos la energía que tiene acumulada (los amperios-hora) ya que esta entrega continuada la “asfixia” al cabo de un rato.
En lugar de usar baterías convencionales de Pb , se deben usar baterías de gel de plomo o, mucho mejor de ciclo profundo, a ser posible de tecnología AGM, diseñadas para este tipo de trabajo,las cuales sí serán capaces de entregar la intensidad solicitada durante el tiempo previsto y durarán muchos ciclos de carga-descarga, las cuales las hace ideales para instalaciones solares y para embarcaciones de recreo.
Para calcular la intensidad en amperios que consume su motor, se puede usar la siguiente fórmula:
Empuje en libras / Voltaje del motor x 12 = Amperios que consume.
Por ejemplo para motores de 55 libras de empuje alimentados a las tensiones de 12, 24 o 36 voltios respectivamente tendremos:
55 libras de empuje /12 Voltios x 12 = 55 Amperios
55 libras de empuje /24 Voltios x 12 = 27,5 Amperios
55 libras de empuje /36 Voltios x 12 = 18,3 Amperios
Observe de estos datos una característica muy interesante : para igual empuje si usamos tensiones mas altas de alimentación el consumo será menor
Es interesante destacar en este punto que aunque tengamos un motor de 55 libras de empuje, probablemente no lo vamos a usar continuamente al 100% de potencia, por lo que deberemos estimar el % de potencia media usada.
Asimismo en función del número de horas continuadas que desea de autonomía,se puede calcular la batería necesaria siguiendo la siguiente formula:
Batería necesaria = consumo en amperios x % de potencia x horas de funcionamiento x 1,3
Por ejemplo: Con un motor que consume 55 Amperios, que usaremos a una media del 75% de su potencia y deseamos una autonomía de 3 horas necesitaremos una bateria de la siguiente capacidad:.
Capacidad= 55 A x 0,75 x 3 h x 1,3 = 160,88 Ah
Una ultima nota : Para mantener la capacidad de la batería y evitar estropearla, es importante recargar la batería antes de que se haya agotado completamente.
Elección del motor fueraborda electrico
A grandes rasgos , diremos que para mover una pequeña neumática de menos de cuatro metros, con un motor eléctrico de hasta 40 libras nos bastaría. Podremos movernos con soltura incluso cargando la embarcación. Si la embarcación es mayor como un velero de 6 o metros o es una clásica de fibra, necesitamos los de mayores potencias para moverla sin problemas ( a mayor peso, más libras de empuje).
Motor de empuje de 18 libras es ideal para kayaks, canoas y bote a 6 ‘y se moverán
a 3 o 4 mph en la mayoría de las condiciones
Motores de 40 libras son ideales para el pescador en los barcos en lugares protegidos .Moverá la mayoría de los barcos pesqueros del tipo de la pesca en 3 a 4 mph en condiciones razonables
Motores de 55 lb es na opción popular para los pescadores en aguas más grandes y da ese poquito extra de poder que puede ser requerido si el viento pica .Debe mover la mayoría de los barcos de tipo de pesca de tamañol 12 a 16 con una velocidad entre 4 o 5 mph en condiciones razonables
Motores de 62 lb es un nuevo tamaño de fueraborda y es ideal para las aguas más grandes, el mar y la pesca más grande en barcos
Los motores de 86 lb suelen ser de 24 voltios (2 baterias de 12 voltios en serie) y tienen un rango de usos comerciales y puede mover barcos grandes
Jago – Motor fueraborda eléctrico 86 lb – 2.050 kg
Como ejemplo de motor fueraborda de gran potencia a un precio ajustado (140€en Amazon)destaca el modelo 86 LBS ETBM04-1BP del fabricante Jago destacando por una gran potencia de propulsión de aprox. 2050 kg( 86 libras ) .
La batería con el mismo rendimiento dura más tiempo gracias a la alta eficiencia energética del motor ,el cual ademas puede ser monitorizado fácilmente gracias a que lleva integrado un voltímetro con 10 LED .
El motor tiene 5 marchas hacia delante y 3 hacia atrás y se puede usar en aguas saladas pero es necesario limpiarlo minuciosamente después del uso .La hélice con profundidad de inmersión es regulable y la presión de la dirección también es regulable (la caja de control giratoria rota 360º ).
También este motor incluye sistema de inclinación rápida con 10 niveles de inclinación, ajusta el ángulo o eleva el motor sobre el agua
Resumiendo esta son las características mas destacables:
Tamaño (L/An/Alt): aprox. 58/19/130 cm
Tamaño del eje (L): aprox. 1016 mm
Peso: aprox. 10,27 kg
Voltaje: aprox. 24 V
Propulsión/potencia: hasta aprox. 1.164 kW /aprox. 39,4 CV
Potencia de propulsión: aprox. 2.050 kg
Caja de control: rota hasta aprox. 360º
5 marchas hacia delante y 3 hacia atrás
la velocidad de este motor se puede ajustar con más precisión que la del motor de combustión
Jilong ETM 55 LBS
Hablamos de un potente motor eléctrico fueraborda de un precio contenido ( su fabricación china lo delata) ,muy ligero (unos 9kg ) , ideal para todas las embarcaciones de hasta 1800 kg de peso ( es decir valdria para embarcacion de 6 a 7mt)
Funciona con una batería de vehículo de 12 V AGM (recomendación: mín. 80 Ah)
Cuenta con 5 marchas hacia adelante y 3 hacia atrás
Su punto fuerte es una fuerza de empuje de 55 lbs (25 kp / 245 N) con la que alcanzará su objetivo fácilmente
El bloqueo se lleva a cabo con 2 tornillos de tope y 2 tuercas de mariposa grande, de modo que no se precisa de herramientas para el montaje
Aunque puede ser discutible algunos aspectos lo que es innegable que este modelo para la potencia que desarrollo pocos modelos encontremos en el mercado por ese precio pues este modelo se puede conseguir por unos 250€ con gastos de envio incluidos en Amazon.
Resumiendo esta son las características mas destacables:
Alimentación: 12 voltios
Consumo (potencia de entrada): 53 A
Potencia (potencia de salida): 636 vatio
Línea de producto: Jilong Watercraft
Potencia / fuerza de empuje:: 55 lbs
Control: One Hand Tiller Twist
Marchas: 5 hacia adelante / 3 hacia atrás
vidaXL P37 86 libras (39 kg)
Este motor de arrastre es casi completamente silencioso y no contamina. Cada vez son más las áreas que permiten sólo a los barcos con motores eléctricos, por lo tanto, un motor eléctrico es la mejor opción.
Este silencioso motor fuera de borda tiene un empuje de 86 libras (39kg) y una longitud del eje de 101,6 cm.
Se puede conectar fácilmente a la embarcación y conectado a una batería (no incluida) de 2 x 12V / 80A (gel o AGM), que será adecuada para unas 3-4 horas de navegación
El motor cuenta con luces indicadoras de la batería, pudiendo ver cuando la batería está a punto de descargarse.
Otro aspecto es que el motor puede girar a 360 ° y tiene 8 velocidades diferentes, 3 de ellas inversas. Incluso para evitar problemas en aguas poco profundas, es posible plegar el motor, siendo ademas el mango de dirección ajustable.
Este modelo es uno de los mas caros de esta comparativa ( casi 300€) pero es importante destacar el acabado que es de los mas destacado junto con su alta potencia de empuje
Resumiendo esta son las características mas destacables:
Longitud del eje: 101,6 cm
Fuerza de empuje: 86 libras (39 kg)
Motor giratorio a 360 grados: si
Número de velocidades de avance: 5
Número de velocidades inversas: 3
Potencia máx: 1152 W
Resistente a aguas saladas: si
Indicadores de batería: si
Conexión: 24 voltios
Bison – (62 ft / lb 12v)
Este modelo aunque es de relativa media potencia destaca por su calidad y por incluir 2 hélices ( es decir lleva una hélice de repuesto)
Cuenta con 5 marchas adelante y 3 marcha atrás sin engranajes.
Presume de estar fabricado en UK de modo que según el fabricante hablan de que es prácticamente indestructible gracias a la composición del eje más fuerte que el acero y que ademas flexiona en caso de impacto
Incluye un tratamiento de anticorrosión
Sobre el soporte del motor lleva e bloqueo de la palanca duradero (NO se rompe, no se retuerce ni se oxida) dos veces más fuerte que los soportes convencionales.
Cuenta con la función » soower Prop» de diseño patentado que sirve pora alejar embolsamientos o malas hierbas sin agotar la valiosa energía.
Resumiendo esta son las características mas destacables
Mount: Bloqueo de la palanca soporte espejo de popa ajustable
Control: ext Twist timón
Empuje Max: 62Lb/28 kg)
Max Amp Draw: 58 Amperio
Tension alimentacion s: 12 V
Marchas: 5 adelante y 3 marcha atrás
Peso: 12 kg
Y por cierto en este vídeo se puede ver el motor en acción








Debe estar conectado para enviar un comentario.