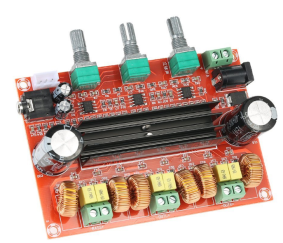
En esta ocasión ,vamos a ver una barra de sonido compuesta por cajas con los altavoces (que son atornillables e impresas en 3d ) y un económico amplificador 2.1 de la que hablamos en otro post que cuesta unos 12€ en Amazon en el que básicamente solo hay que alimentar con corriente continua DC entre 12-24 V con una fuente conmutada y conectar tanto la entrada de audio como las tres salidas a sendos altavoces.
La potencia de salida de los canales izquierda y derecha es 50WX2 (máx.) y la salida de subwoofer de 100 w (max), la eficiencia puede llegar por encima de 90%.
Los canales izquierdo y derecho de rango completo, con 24 v tensión de alimentación pueden conducir altavoces de 3-16 ohmios (es decir una gama muy amplia) y en el caso del subwoofer si se alimenta el montaje con 24 v puede conducir un subwoofer, único de impedancia entre 2-16 ohm teniendo en cuenta que a menor impedancia de los altavoces podremos conseguir una mayor potencia de salida.
Las características de este módulo son:
- Tensión de alimentación: DC 12-24 V
- Chip: TPA3116 *
- Tipo 2 Cadena de 3: Channels (canal derecha, canal derecha, subwoofer)
- Potencia de salida: 50 *1 *2 RMS subwoofer sobre 8 ohmios
- Gama respuesta en frecuencia: 14-100 KHz
- SNR 100dB de frecuencia: conmutación: 1,2 MHz
- Tamaño PCB 100 cm *70 *%2F 30 mm **3,94 2,75 1,18in (la + W H)
1 *2,1 canales bordo de amplificador de audio
Es interesante destacar que para alimentar este amplificador debemos usar un fuente conmutada entre 12 y 24V DC de unos 18Amp dada la gran intensidad necesaria, pues sería mucho más costoso, voluminoso e ineficiente cubrir la alimentación con una fuente convencional regulada basada en el clásico transformador con el puente de diodos , gran condensador y el circuito de regulación.
El amplificador de audio
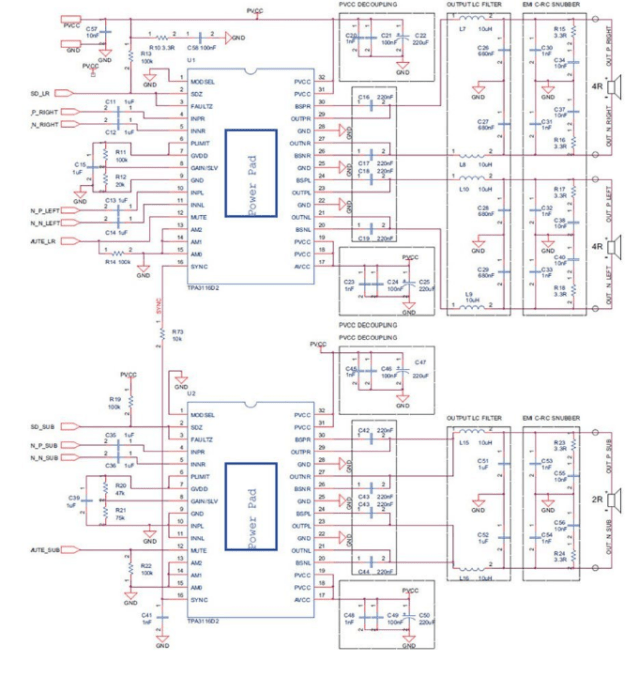
Un amplificador 2.1 que podemos comprar ya montado se basa en usar dos CI:
- Un TPA3116D2 en modo maestro 400 kHz, BTL, ganancia si 20 dB, límite de potencia no implementado.
- Un TPA3116D2 en Esclavo, ganancia del modo PBTL de 20 dB. Las entradas están conectadas para entradas diferenciales.
Es decir usamos dos CI TPA3116D2 , uno para componer la salida estéreo de 50+50W para dos canales de audio y un segundo en configuración mono para entregar un tope de potencia de 100W
El esquema del montaje como vimos es el siguiente:
El condensador de filtro principal es 4700 uf 35 v, pero para la amplificación de potencia al usar un chip de limitación, este amplificador puede aceptar sólo desde 12v hasta 24 v DC de alimentación y así el condensador trabajará en buenas condiciones por lo que no conviene sobrepasar precisamente los 24V DC.
Alimentación del circuito
En cuanto los requisitos de suministro de energía para el TPA3116D2, consisten en un suministro de mayor voltaje para alimentar la salida etapa del amplificador de altavoz por los que hay arios reguladores están incluidos en el TPA3116D2 para generar voltajes necesarios para el circuito interno de la ruta de audio. La fuente de alta tensión, entre 4.5 V y 26 V, suministra la circuitería analógica (AVCC) y la potencia etapa (PVCC). El suministro de AVCC alimenta LDO interno, incluido GVDD. Precisamente esta salida LDO está conectada a pines externos para fines de filtrado, pero no deben conectarse a circuitos externos. (la salida de GVDD LDO ha sido dimensionado para proporcionar la corriente necesaria para las funciones internas pero no para la carga externa)
Dada las características de estos CI ,por tanto podemos alimentarlos con batería 12 o 24V o bien una fuente conmutada de 12-24V de al menos 15 Amp. ( con un consumo máximo típico 7.5 Amp).
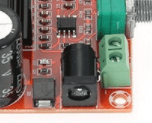
A la hora de hacer las conexiones, solo necesitamos conectar la alimentación externa de 19V de 6Amp mayor o igual que 120W, bien por el jack de 5.5mm -2.1(2.5) con masa al negativo), o bien a la ficha de conexiones que hay justo al lado del conector de alimentación (mucho cuidado con equivocarse de polaridad).
Una buena solución es optar por una fuente reciclada de alimentación de algun ordenador portatil de 120W recomendando que al menos sea de 20VDC.
EL montaje
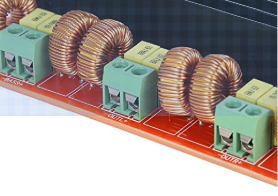
La conexiones del circuito no pueden ser más simples ya que la placa en sí mismo ya integra los controles individuales de los tres amplificadores de forma individualizada .Los conectores de los altavoces simplemente los conectaremos a las salidas en la regleta marcada como BASS, OUTL y OUTR .
Aunque pueda parecer poco relevante , también aquí se debe respetar escrupulosamente la polaridad de las conexiones a los altavoces pues si uno se equivoca los altavoces funcionaran en contra-fase reduciéndose así la potencia de salida total.
Para evitar que se toquen las conexiones de los altavoces lo mejor es colocar jack aéreos pues si conectaremos jacks metálicos estos conectarían la masa al chasis, cosa que debemos evitar pues las salidas de los altavoces como vemos en el esquema son independientes y no comparten la masa así que recomiendo conectar los jacks aéreos , en este caso del tipo RCA que pillamos por atrás con los embellecedores de plástico.
Personalmente recomiendo estañar los cables de audio hacia las placa incluso aunque lo vayamos a fijar a las tres regletas de salida de los altavoces.
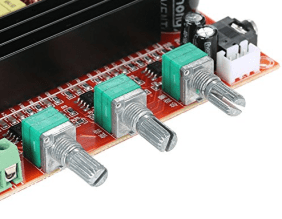
Respecto a los tres potenciómetros :
- El de la izquierda es el control de volumen estéreo (sólo para el ajuste de los canales izquierdo y derecho)
- El central es el control de volumen del Subwoofer.
- El control de volumen derecho es global (para 3 canales de ajuste).
Una solución sencilla es fijar la placa a una tabla de madera de aproximadamente las dimensiones de la placa del amplificador y acoplar éstá a las cajas de altavoces o hacerlo directamente a la caja impresa en 3d.
![IMG_20180829_192255[1]](https://soloelectronicos.com/wp-content/uploads/2018/08/img_20180829_1922551.jpg?w=532&h=399)
Respecto la entrada de audio es estèreo bien por un jack de 3 1/2″ estèreo o bien con un conector macho que hay junto al propio jack.
Respecto a los potenciómetros podemos adaptar una de las cajas de altavoces con tres sendos taladros para los tres potenciómetros o ( o modificarla en 3d) ,por lo que quedaria es ajustar los botones de plástico (entran a presión pero si no se aprietan simplemente deberemos abrir un poco el eje con un destornillador plano ) y los tornillos que fijan la placa a la base de madera
Finalmente sólo nos queda la alimentación donde únicamente habrá que conectar la fuente de ordenador portàtil (de20V DC) al jack de alimentación reciclada de un viejo portátil.
Como se pude ver, usamos una fuente de 20V de un viejo portàtil HP que conectaremos al jack izquierdo del pcb por medio de un nuevo jack.
Por cierto, podemos complementar con reproductores de mp3, vu-meter digital , etc. alimentando esta parte con la fuente principal.
![IMG_20180829_192305[1]](https://soloelectronicos.com/wp-content/uploads/2018/08/img_20180829_1923051.jpg?w=483&h=362)
Montaje Altavoces
Una opción para complementar el amplificador es usar cajas impresas para los altavoces. Cada altavoz tiene su propio gabinete que se conecta al siguiente gabinete con 3 tornillos pequeños. Dependiendo del tipo de altavoz que obtenga, puede usar las diferentes frontales: una que le permite montar el altavoz en la parte frontal de la fascia o una donde el altavoz se monta entre la fascia y la carcasa.
Aquí podemos descargar los ficheros para imprimir en 3d: https://www.myminifactory.com/object/3d-print-3d-printable-modular-sound-bar-center-speaker-41370

La fascia se une al recinto con 4 tornillos pequeños. Una opción para la barra de sonido es usar PLA rojo para los recintos y negro para las fascias y los lados, lo que puede resultar ser una combinación bastante agradable.
Puede combinar cualquier número de altavoces en su propia barra de sonido: por ejemplo utilizando 10 conectándolos en serie o en paralelo para terminar con una impedancia de alrededor de 4 ohmios que no cargue excesivamente la etapa final del amplificador.
El ancho total de la barra de sonido de la imagen es de 72 cm (o 28 pulgadas) lo que le da un aspecto elegante. Por supuesto, también puede usar 2 o 3 unidades de altavoces juntas, coloque el altavoz de lado y listo, ¡también tiene sus altavoces izquierdo / derecho y envolvente!

Según el tipo de conexión que desee, puede perforar un agujero en la parte posterior de uno de los altavoces y conectarlo directamente a su amplificador (los altavoces centrales generalmente no son estéreo) o incluir el amplificador que hemos hablado .
Para los gabinetes en sí, debería poder imprimir todas las piezas sin necesidad de ningún soporte. Utilicé una resolución de .2 mm a una velocidad de 6 cm / seg y todo debería salir bien.
Si desea agregar el amplificador también, necesitará usar soportes para imprimir los corchetes.

El sonido le sorprendrà si piensa en las reducidas dimensiones de la placa así como del mínimo coste de éste.







Debe estar conectado para enviar un comentario.