En realidad no es demasiado difícil crear un aplicación capaz de enviar correos electrónicos usando el IDE de Android Studio .De hecho gracias al APi de Javmail podremos enviar e-mails sin utilizar la aplicación de correo electrónico que android incluye por defecto utilizando javamail API para crear nuestro propio email del remitente herramientas que enviará correo internamente.
Tenemos que seguir los pasos que se dan a continuación:
1. Descargar los archivos de biblioteca de api de java.
Tenemos que descargar tres librerías java:
-
- activation.jar
- mail.jar.
- additionnal.jar
Lo puede descargar de Clic aquí.
2 Ahora crear una app en Android studio
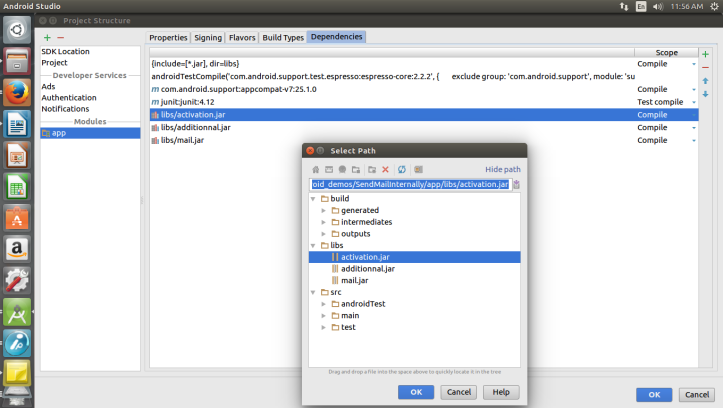
3-Ir a la carpeta del proyecto -> aplicación -> libs y agregue todos los archivos jar en libs ahora uno por uno, haga clic en biblioteca de archivos en la opción haga clic en Agregar como biblioteca en todos los archivos jar.

También puede Agregar biblioteca por otro camino, pero lo importante es que incluya esta tres librerías:
- activation.jar
- mail.jar.
- additionnal.jar
Ir a archivo >Proyecto estructura > seleccione aplicación> opción derecha haga clic en dependencias ahora haga clic en el botón de pulse(+) para agregar > seleccione dependencia de archivo> archivo seleccione Biblioteca > OK.
4. Ahora abrir el archivo manifest.xml y poner los permisos de internet.
<uses-permission android:name="android.permission.INTERNET"/>
Ahora busque manifiesto está buscando como.
<?xml version="1.0" encoding="utf-8"?>
<manifest xmlns:android="http://schemas.android.com/apk/res/android"
package="com.sp.sendmailinternally">
<uses-permission android:name="android.permission.INTERNET"/>
<application
android:allowBackup="true"
android:icon="@mipmap/ic_launcher"
android:label="@string/app_name"
android:supportsRtl="true"
android:theme="@style/AppTheme">
<activity android:name=".MainActivity">
<intent-filter>
<action android:name="android.intent.action.MAIN" />
<category android:name="android.intent.category.LAUNCHER" />
</intent-filter>
</activity>
</application>
</manifest>
4. Ahora abrael fichero activity_main.xml para crear el archivo de diseño agregar después de código.
<?xml version="1.0" encoding="utf-8"?>
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:tools="http://schemas.android.com/tools"
android:id="@+id/activity_main"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical"
android:paddingBottom="@dimen/activity_vertical_margin"
android:paddingLeft="@dimen/activity_horizontal_margin"
android:paddingRight="@dimen/activity_horizontal_margin"
android:paddingTop="@dimen/activity_vertical_margin"
tools:context="com.sp.sendmailinternally.MainActivity">
<EditText
android:id="@+id/edittext_recipient_id"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:hint="Recipient Email"
android:textSize="18sp" />
<EditText
android:id="@+id/edittext_subject"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:hint="Subject"
android:textSize="18sp" />
<EditText
android:id="@+id/edittext_message"
android:layout_width="match_parent"
android:layout_height="100dp"
android:gravity="start"
android:hint="Message"
android:textSize="18sp" />
<Button
android:id="@+id/btn_send_mail"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_gravity="center_horizontal"
android:text="Send Mail"
android:textAllCaps="false" />
</LinearLayout>
5. Cree la clase de Asyntask para el envío de llamada correo API.
package com.sp.sendmailinternally;
import android.app.ProgressDialog;
import android.content.Context;
import android.os.AsyncTask;
import android.widget.Toast;
import java.util.Properties;
import javax.mail.Message;
import javax.mail.MessagingException;
import javax.mail.PasswordAuthentication;
import javax.mail.Session;
import javax.mail.Transport;
import javax.mail.internet.InternetAddress;
import javax.mail.internet.MimeMessage;
/**
* Created by ps205 on 3/1/17.
*/
public class SendMailAsynTask extends AsyncTask<Void, Void, Void> {
//Declaring Variables
private Context context;
private Session session;
//Information to send email
private String email;
private String subject;
private String message;
//Progressdialog to show while sending email
private ProgressDialog progressDialog;
//Class Constructor
public SendMailAsynTask(Context context, String email, String subject, String message) {
//Initializing variables
this.context = context;
this.email = email;
this.subject = subject;
this.message = message;
}
@Override
protected void onPreExecute() {
super.onPreExecute();
//Showing progress dialog while sending email
progressDialog = ProgressDialog.show(context, "Sending message", "Please wait...", false, false);
}
@Override
protected void onPostExecute(Void aVoid) {
super.onPostExecute(aVoid);
//Dismissing the progress dialog
progressDialog.dismiss();
//Showing a success message
Toast.makeText(context, "Message Sent", Toast.LENGTH_LONG).show();
}
@Override
protected Void doInBackground(Void... params) {
//Creating properties
Properties props = new Properties();
//Configuring properties for gmail
//If you are not using gmail you may need to change the values
props.put("mail.smtp.host", "smtp.gmail.com");
props.put("mail.smtp.socketFactory.port", "465");
props.put("mail.smtp.socketFactory.class", "javax.net.ssl.SSLSocketFactory");
props.put("mail.smtp.auth", "true");
props.put("mail.smtp.port", "465");
//Creating a new session
session = Session.getDefaultInstance(props,
new javax.mail.Authenticator() {
//Authenticating the password
protected PasswordAuthentication getPasswordAuthentication() {
return new PasswordAuthentication(Config.EMAIL, Config.PASSWORD);
}
});
try {
//Creating MimeMessage object
MimeMessage mm = new MimeMessage(session);
//Setting sender address
mm.setFrom(new InternetAddress(Config.EMAIL));
//Adding receiver
mm.addRecipient(Message.RecipientType.TO, new InternetAddress(email));
//Adding subject
mm.setSubject(subject);
//Adding message
mm.setText(message);
//Sending email
Transport.send(mm);
} catch (MessagingException e) {
e.printStackTrace();
}
return null;
}
}
6. Ahora abra MainActivity.java y agregue el siguiente código.
package com.sp.sendmailinternally;
import android.os.Bundle;
import android.support.v7.app.AppCompatActivity;
import android.view.View;
import android.widget.Button;
import android.widget.EditText;
public class MainActivity extends AppCompatActivity {
EditText edittext_recipient_id, edittext_subject, edittext_message;
Button btn_send_mail;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
//initializr vista para encontar vista por id
edittext_recipient_id = (EditText) findViewById(R.id.edittext_recipient_id);
edittext_subject = (EditText) findViewById(R.id.edittext_subject);
edittext_message = (EditText) findViewById(R.id.edittext_message);
btn_send_mail = (Button) findViewById(R.id.btn_send_mail);
//activar un listener onclick en un boton
btn_send_mail.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
//get input data from view
String mRecipientMail = edittext_recipient_id.getText().toString();
String mSubject = edittext_subject.getText().toString();
String mMessage = edittext_message.getText().toString();
new SendMailAsynTask(MainActivity.this, mRecipientMail, mSubject, mMessage).execute();
//llama al contructor de send mail asyntask mediante el envio de un parametroperameter
}
});
}
}
7. Ya puede construir y ejecutar la aplicación
Nota:- cuando ponga su id debe ser accesible acceso menos seguro aplicaciones .Para cambiar configuración para motivos de seguridad de correo vaya a cambiar la configuración y actiíela .

Por cierto todo el código esta disponible en descargar código fuente












Debe estar conectado para enviar un comentario.