En efecto simplemente podemos usar una Raspberry Pi como retrovisor o cámara trasera en conjunción con su smartphone o tablet gracias a la aplicación RearPi.
Esta app disponible en Google Play gratuita y sin anuncios se conecta a su Raspberry Pi a través de SSH y activa bien una cámara usb externa o bien la cámara nativa para Raspberry Pi con interfaz CSI un enlace de mayor ancho de banda que transporta los datos de píxeles de la cámara al procesador. .
Disponiendo de la Rasberry con una cámara, basta con conectarse a esta via ssh (nombre de IP-Adress/Login y contraseña), iniciar la cámara en el arranque de la aplicación o con el botón «Abrir» y pulsar el modo de pantalla completa para disponer de la visión trasera desde la app de un modo muy nítido . Al continuar el trayecto si ya no se requiere basta cerrar la cámara con el botón «EXIT» para disponer nuestro smartphone para reproducir nuestra lista de música favorita o que nos guié a través de alguna app de navegación

Razones para usar una Raspberry Pi como cámara trasera
Puede que piense que existen en el mercado soluciones especificas de cámaras traseras para coche a un precio similar a una Raspberry Pi sobre todo si pensamos en que necesitamos adquirir el hardware especifico que vamos a describir, lo cual ciertamente podría ser parcialmente cierto , pero esta afirmación se desmorona si podemos usar elementos que ya tengamos pero sobre todo , si deseamos usar nuestro smartphone o incluso un terminal obsoleto que tengamos para visualizar la señal , lo cual es un punto a su favor de esta solución si lo comparamos con las pequeñísimas o antiestéticas pantallas de visualización que ofrecen los kits de cámaras traseras (piénsese que solemos llevar siempre un smartphone y además puede usarse para otras usos)
Incluso en otros vehículos (por ejemplo para las caravanas) pueden usarse para ofrecer la visión delantera o trasera por múltiples pantallas de forma inalámbrica
- Grabación cámara (.. 15 min 30 min 45 min)
- Bucle de grabación (.. 15 min 30 min 45 min)
- Opción para establecer la calidad de grabación
- Reproductor multimedia integrado para ver grabaciones
- Modo de pantalla completa y sin publicidad
- Documentación Integrada
En realidad como podemos intuir , esta app se conecta a su Raspberry Pi ( o cualquier placa basada en Linux ) por ssh mediante IP-Dirección , login y contraseña mediante WIFI dentro de la misma red , y , una vez conectada se puede iniciar la cámara en la aplicación o con el botón «OPEN» ,pudiéndose cerrar la cámara con el botón «SALIR»
Para utilizar su Frambuesa Pi con RearPi como cámara y esta aplicación rearPi tendremos que seguir unos pocos sencillos pasos en la Raspberry PI, pero antes veamos el hardware necesario
Hardware necesario
¿Qué necesita para obtener una señal de video?
- Una Raspberry Pi o un dispositivo que ejecute una distribución de Linux con un sistema operativo preinstalado y una trabajando la conexión SSH.
- Un dongle WiFi como el «Edimax EW-7811»
- Una cámara USB o cámara web como Logitech C270
- Un cable de carga micro USB
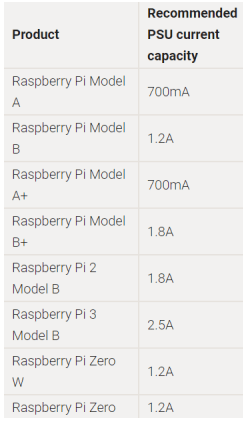
- Un cargador de coche como el «Anker» PowerDrive2 » Entrada: DC 12 / 24V Salida: 5V / 4.8A 2.4 A por puerto. Por favor, asegúrese de que su Raspberry se pone suficiente potencia y el voltaje correcto. La salida de su cargador de coche debería tener 5V y la capacidad actual recomendada para su modelo está escrito en la lista siguiente:
Instalación de mjpg streamer
Para que su Raspberry esté lista para transmitir video via tcp/ip a traves de una conexión wifi, debe seguir estos pasos:
1. Abra un terminal por ssh
2. Instale mread streamer con estos comandos (comience con el primero):
sudo apt-get install libv4l-dev
sudo apt-get install libjpeg8-dev
sudo apt-get install subversion
sudo apt-get install imagemagick
svn co https://svn.code.sf.net/p/mjpg-streamer/code/
cd / home / pi / code / mjpg-streamer /
make USE_LIBV4L2 = true clean all
sudo make DESTDIR = / usr install
3. !Listo!!
Configurar una dirección IP estática y conexión WiFi
Para asegurarse de que su Raspberry Pi siempre tenga la misma dirección IP, establezca IP estática (para que no tenga problemas al iniciar la app)
Por ello verifique su interfaz WiFi con el comando :ifconfig (buscar la ip asociada a Interfaz WiFi) y una vez seap el nombre de interfaz WiFi así , edite las interfaces:
- sudo nano / etc / network / interfaces
- Desplazarse hacia abajo a la #WLAN sección (si no está allí crear uno al final del archivo)
- Configure su interfaz a IP estática
- Configure su Raspberry Pi a una dirección fija ,por ejemplo «192.168.43.125» o lo que quiera
- Escriba el nombre de la zona wifi y contraseña entre comillas «
- Salvar el fichero y reiniciar la Raspberry
RearPi
Para empezar a usar su Raspberrry Pi como cámara IP trasera, una vez seguido el proceso anterior de personalización de la Pi , es importante que nuestro smartphone y la Raspberry estén en la misma red , para lo cual podemos automatizar el proceso con la App Automate , tal y como vimos en este post
Muy resumidamente la red wifi , se consigue con la función de “hot spot ” de nuestro teléfono inteligente la cual permite conectar diferentes dispositivos conectados a nuestra propia red wifi generada desde el propio terminal .En caso de Android vaya a “Configuración –>Más –>Anclaje y punto de acceso portátil” o en versiones de Android superiores a a la 7 vaya a Ajustes (la tuerca ) , busque la opción de Más y vaya a Anclaje de red y zona Wi-Fi y pulse Zona Wifi portátil y áctivelo ( interruptor a la derecha).Una vez creada la zona wifi podemos automatizar el proceso con la App Automate buscando el punto de acceso en el automóvil ( Hotspot ON/OF CAR ) y descargando el flujo
Ahora con ambos equipos en red ,conecte la Raspberry Pi con su cargador e Instale la app RearPi desde Google Play
Una vez ejecute la app, abra la «configuración» y configure la «Dirección IP», el «Nombre de inicio de sesión» y la contraseña (std pw = raspberry) y podemos empezar con los ajustes de la pantalla de inicio ajustable:
- Establezca los segundos por cuánto tiempo pantalla de inicio se queda (en la configuración)
- Establecer «0» para ninguna pantalla de inicio
- Activar la cámara cada inicio


Una vez realizados los ajustes , pulsaremos el botón ABRIR , el cual se conectará a la Raspberry Pi y activara la cámara actualizando la señal de vídeo
Si queremos abandonar esta utilidad , pulsaremos el Botón EXIT, el cual se conectara a la Raspberry Pi y desactivara la cámara, cerrando aplicación
Un modo muy interesante es el Modo de pantalla completa, qu e opera del siguiente modo:
- Toque una vez en el vídeo para obtener modo de pantalla completa
- Toque nuevamente para salir de pantalla completa modo

Un truco muy interesante es el Modo de pantalla completa al inicio, que conseguiremos si establecemos la marca de verificación para ir directamente en el modo de pantalla completa (configuración) cuando iniciemos la aplicación
Por cierto, también es posible grabar video y visionarlo desde la propia aplicación.

Resumidamente estos son los posos a seguir para crear una cámara trasera :
- Establecer un hot spot para conectar la Pi y su teléfono / tableta.
- Para transmitir vídeo tiene que instalar streamer MJPG en Raspberry Pi:.
- Ejecute sudo ◦ apt-get install build-essential libjpeg-dev ImageMagick subversión libv4l-dev checkinstall
- Ejecute svn co svn: //svn.code.sf.net/p/mjpg-streamer/code/ MJPG-streamer
- Ejecute cd MJPG-streamer / mjpg-streamer
- Ejecute VERSION = $ (sed -n ‘/SOURCE_VERSION/s/^.*»\(.*\)».*$/\1/gp’ REVISIÓN ◦ = $ (CN svnversion | sed «s /.*: //»)
- Ejecute sudo checkinstall –pkgname = MJPG-streamer –pkgversion = «$ + $ VERSIÓN DE REVISIÓN ~ checkinstall» –default
- Hacer USE_LIBV4L2 = true ← opcional
- De a su Raspberry Pi una dirección IP estática (pasos detallados en el manual de PDF en https://alikamouche.files.wordpress.com/2018/03/rearpi_documentation_v1-33.pdf&xid=17259,15700021,15700124,15700149,15700186,15700190,15700201,15700214&usg=ALkJrhiuPbc9sJgGmYqz3h80veN8a7Yx3g).
- Conectar con la App a su a Pi (IP / Conexión / PW)
Con esta solución no, necesita alguna fuente de radiación lumínica o infrarroja pues en condiciones de muy baja luminosidad trabaja bien especialmente si usa la cámara nativa.
Por cierto, para probar si esta funcionando el stream de video ,tenemos el comando raspistill que sirve para hacer fotografías. Si busca en internet hay proyectos para hacer de forma automatizada varias tomas y hacer un timelapse de modo que la ventaja de esta cámara es que la podrá usar como cámara de vigilancia con uno leds infrarojos para iluminar la zona.

 :
:


Debe estar conectado para enviar un comentario.