Este proyecto desarrollado por Zeng Wang constituye una versión reducida de un sistema de auto-conducción ( eso si usando un coche de RC) con una Raspberry Pi 2 Model B – Placa base (ARM Quad-Core 900 MHz, 1 GB RAM, 4 x USB, HDMI, RJ-45)
, un Arduino ,y un ordenador exterior con software de código abierto.
El sistema utiliza tanto una Raspberry Pi con la cámara incorporada oficial como un sensor ultrasónico como entradas, enviando la informacion a un ordenador que recibe el video y se encarga del procesamiento en tiempo real del video capturado por la raspberry Pi mediante reconocimiento de objetos (señal de stop y semáforos) y medición de distancia ordenando las señales correspondientes de la dirección mediante una placa Arduino para el control del coche de RC.
Dos programas ejecutándose en la Raspberry Pi permiten gestionar la información que recibe y la transmiten junto al vídeo de baja resolución (320 x 240) que capta la cámara a otro ordenador vía WiFi .A su vez el mando que controla el coche teledirigido efectivamente sigue dirigiéndolo, pero lo hace a través de las órdenes que le pasa ese ordenador vía USB mediante una placa Arduino.
El código fuente esta disponible en git hub
El resultado, como puede verse en el vídeo, es espectacular .
El objetivo del autor Wang en efecto era modificar un coche RC para que fuese capaz de manejar tres tareas: auto-conducción en la pista, la señal de detención ,la detección semáforo, y evitar colisiones frontales.
El sistema construido consta de tres subsistemas:
- Unidad de entrada (cámara, el sensor de ultrasonidos)
- Unidad de procesamiento (ordenador) y
- Unidad de control del coche RC.
Unidad de entrada
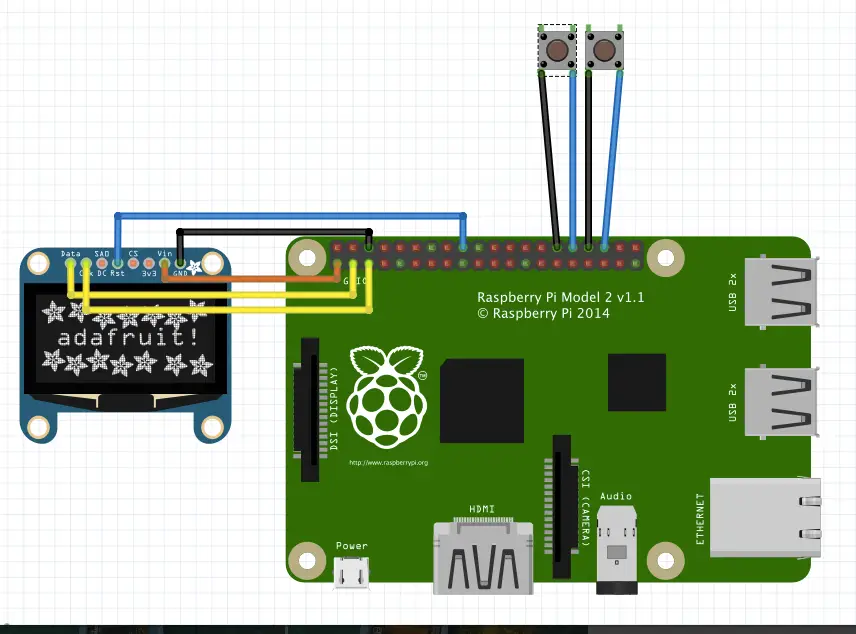
Una placa Raspberry Pi 2 Model B – Placa base (ARM Quad-Core 900 MHz, 1 GB RAM, 4 x USB, HDMI, RJ-45) al que se conecta un módulo de cámara pi y un sensor ultrasónico-HC SR04 se utiliza para recoger datos de entrada. Dos programas de cliente se ejecutan en Raspberry Pi para el streaming de vídeo en color y datos de los sensores ultrasónicos a la computadora a través de conexión Wi-Fi local.Con el fin de conseguir una baja latencia de streaming de vídeo, el vídeo se escala hasta QVGA (320 × 240) resolución.
Unidad de procesamiento
La unidad de procesamiento (ordenador) se encarga de múltiples tareas: recibir datos de Raspberry Pi, el entrenamiento de la red neural red y la predicción (dirección), la detección de objetos (señal de stop y semáforos), medición de distancia (visión monocular), y el envío de instrucciones via Arduino a través de conexión USB .
Servidor TCP
Un programa de servidor TCP multihilo se ejecuta en el ordenador para recibir cuadros de imagen por streaming y datos ultrasónicos de la Raspberry Pi. Los cuadros de imagen se convierten a escala de grises y se descodifican en matrices numpy.
Red Neuronal
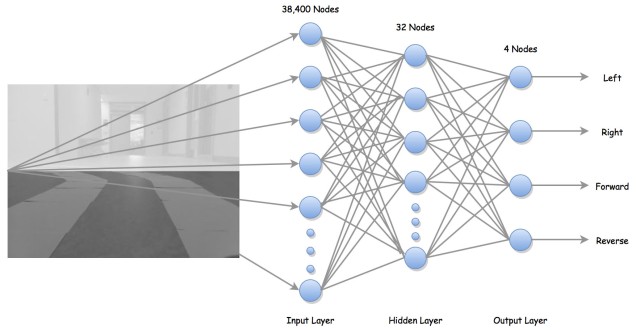
Una ventaja de usar la red neuronal es que una vez que la red ha aprendido, sólo necesita cargar parámetros formados después, y por tanto, la predicción puede ser muy rápida. Sólo la mitad inferior de la imagen de entrada se utiliza para fines de aprendizaje y de predicción. Hay 38.400 (320 × 120) nodos en la capa de entrada y 32 nodos en la capa oculta. El número de nodos en la capa oculta se elige bastante arbitrario.
Hay cuatro nodos en la capa de salida, donde cada nodo corresponde a las instrucciones de control de dirección: izquierda, derecha, adelante y atrás respectivamente (aunque inversa no se utiliza Wang la ha incluido en la capa de salida).
A continuación se muestra el proceso de recolección de datos de entrenamiento.Primero cada cuadro se recorta y se convierte en una matriz numpy. Entonces la imagen de tren está emparejado con la etiqueta de tren (entrada humana). Por último, todos los datos y etiquetas de imagen emparejados se guardan en un archivo NPZ. La red neuronal está entrenada en el uso de OpenCV usando el método de propagación de vuelta. Una vez que la formación se lleva a cabo, los pesos se guardan en un archivo xml. Para generar predicciones, la misma red neuronal se construye y se carga con el archivo xml capacitado.

Detección de Objetos
Para este proyecto Wang adaptó el enfoque basado en la forma utilizando clasificadores en cascada Haar basados en características para la detección de objetos. Desde cada objeto se requiere su propio clasificador y sigue el mismo proceso de formación y detección, asi que en este proyecto sólo se centra en señal de stop y la detección del semáforo.
OpenCV proporciona un entrenador, así como detector. Las muestras positivas (contener objeto de destino) fueron adquiridos utilizando un smartphone , y se recortan para que solo el objeto deseado sea visible. Las muestras negativas (sin objeto de destino), por otro lado, se recogieron al azar. En particular, para el semáforo muestras positivas contienen igual número de semáforos en rojo que semáforos en verde. El mismo conjunto de datos de muestras negativas se utilizan tanto para la señal de stop como para la formación del semáforo. A continuación se muestran algunas muestras positivas y negativas utilizadas en este proyecto.


Para reconocer diferentes estados del semáforo (rojo, verde), se necesita un poco de procesamiento de imágenes más allá de la detección.
El diagrama de flujo a continuación resume el proceso de reconocimiento semáforo.

En primer lugar, entrenado el clasificador en cascada se utiliza éste para detectar un semáforo. El cuadro delimitador es considerada como una región de interés (ROI). En segundo lugar, la falta de definición de Gauss se aplica dentro de la ROI para reducir ruidos. En tercer lugar, encontrar el punto más brillante en el retorno de la inversión. Por último, los estados rojos o verdes se determinan basándose simplemente en la posición del punto más brillante en el retorno de la inversión.
Distancia de medida
Raspberry Pi sólo puede soportar un módulo de cámara de un pi. El uso de dos cámaras web USB traerá peso extra para el coche RC y también parece poco práctico.Por lo tanto, se elige el método visión monocular.
Este proyecto adaptó un modelo de geometría de detectar la distancia a un objeto utilizando el método de la visión monocular propuesto por Chu, Ji, Guo, Li y Wang (2004).

P es un punto en el objeto de destino; d es la distancia desde el centro óptico hasta el punto P. En base a la geometría de la relación anterior, la fórmula (1) muestra cómo calcular la distancia d. En la fórmula (1), f es la longitud focal de la cámara; ∂ es el ángulo de inclinación de la cámara; h es la altura del centro óptico; (x0, y0) se refiere al punto de plano de la imagen y el eje óptico intersección; (x, y) se refiere a la proyección del punto P en el plano de la imagen. Supongamos O1 (u0, v0) es la cámara de coordenadas del punto de eje óptico y el plano de la imagen de intersección, también supongamos que la dimensión física de un píxel correspondiente al eje X y el eje Y en el plano de la imagen son dx y dy. Entonces:
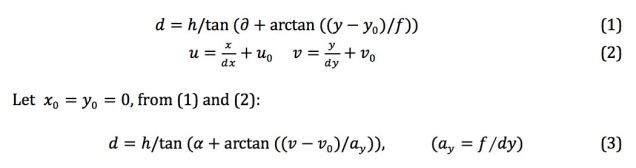
v es la cámara de coordenadas en el eje y, y se puede devolver en el proceso de detección de objetos. Todos los demás parámetros son parámetros intrínsecos de la cámara que se pueden recuperar de la matriz de la cámara.
OpenCV proporciona funciones para calibración de la cámara. Matriz de la cámara para la cámara de 5MP pi se devuelve después de la calibración. Idealmente, a_x y a_y tienen el mismo valor. Varianza de estos dos valores se traducirá en píxeles no cuadrados en la imagen. La siguiente matriz indica que la lente de longitud focal fija en cámara pi ofrece un razonablemente buen resultado en el manejo de la distorsión de aspecto. Aquí es un artículo interesante discutir la distancia focal de la cámara pi con la acción de la lente y su equivalente de cámara de 35mm.
 La matriz devuelve valores en píxeles y h se mide en centímetros. Mediante la aplicación de la fórmula (3), la distancia física d se calcula en centímetros.
La matriz devuelve valores en píxeles y h se mide en centímetros. Mediante la aplicación de la fórmula (3), la distancia física d se calcula en centímetros.
Unidad RC Car Control
El coche RC utilizada en este proyecto tiene un controlador tipo de interruptor de encendido / apagado. Cuando se pulsa un botón, la resistencia entre el contacto pasador y el suelo chip de referencia es cero. Por lo tanto, una placa Arduino se utiliza para simular las acciones sobre el pulsador. Cuatro pines de Arduino se eligen para conectar cuatro clavijas de chips en el controlador, que corresponde a adelante, atrás, izquierda y derecha, respectivamente, acciones. Pines de Arduino envian señales baja indicando a tierra los pines de chips del controlador; Por otro lado el envío de señal de alta indica la resistencia entre los pines de chips y suelo permanecen sin cambios. El Arduino se conecta al ordenador a través de USB. Las salidas de computadora comandos para Arduino utilizando interfaz serie, y luego el Arduino lee los comandos y escribe señales de bajo o alto, simulando acciones de botón de prensa para conducir el coche RC.

Resultados
La predicción de las muestras de prueba devuelve una precisión de 85% en comparación con la precisión de 96% de que las muestras de entrenamiento devoluciones. En la situación de conducción real, predicciones se generan cerca de 10 veces por segundo (velocidad de transmisión de aproximadamente 10 fotogramas / s).
Características Haar por naturaleza son la rotación sensible. En este proyecto, sin embargo, la rotación no es una preocupación ya que tanto la señal de stop y el semáforo son objetos fijos, que es también un caso general en el entorno del mundo real.


Para distancia aspecto medición, el sensor de ultrasonidos sólo se utiliza para determinar la distancia a un obstáculo delante del coche RC y proporciona resultados exactos cuando se toma la detección de ángulo adecuado y estado de la superficie en las consideraciones. Por otro lado, la cámara Pi ofrece «suficientemente buenos» resultados de la medición. De hecho, siempre y cuando sabemos que el número correspondiente a la distancia real, sabemos cuándo dejar el coche RC. Los resultados experimentales de detección a distancia usando la cámara pi se muestran a continuación:

En este proyecto, la exactitud de la medición de la distancia utilizando el enfoque de visión monocular podría estar influenciada por los siguientes factores: (1) errores en la medición de los valores reales, (2) objeto de delimitación variaciones de caja en el proceso de detección, (3) errores en el proceso de calibración de la cámara, (4) relación no lineal entre la distancia y la cámara de coordenadas: la mayor distancia del, más rápido cambio de la cámara de coordenadas, por lo tanto cuanto mayor sea el error.
En general, el coche de RC podría navegar con éxito en la pista con la capacidad de evitar la colisión frontal, y responder a la señal de stop y semáforos en consecuencia.
Segun Wang ,el proceso de entrenamiento fue relativamente sencillo debido a la sencillez del modelo de carretera utilizada, y a eso se le sumaba la detección de objetos gestionada por la plataforma OpenCV (Open Source Computer Vision) que entre otras cosas también permitía calibrar la cámara.
Es sin duda un proyecto apasionante y sorprendente el que ha realizado Zheng Wang demostrando una vez hasta donde puede llegar la capacidad de procesamiento actual presentes en dispositivos tan reducidos y modestos como lo constituye la gama de la Raspberry Pi 2 Model B – Placa base (ARM Quad-Core 900 MHz, 1 GB RAM, 4 x USB, HDMI, RJ-45)
Mas información en la web del autor

Debe estar conectado para enviar un comentario.