El eterno temporizador 555: cómo funciona por dentro
Más de cincuenta años después de su aparición, el circuito integrado temporizador 555 sigue siendo uno de los componentes más utilizados en electrónica analógica, desde proyectos educativos hasta aplicaciones industriales y espaciales. Su éxito se debe a una combinación poco común: simplicidad de uso, robustez eléctrica y una arquitectura interna muy bien pensada.
Un poco de contexto histórico
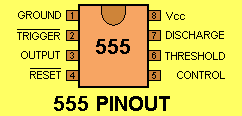
El 555 fue diseñado en 1971 por Hans Camenzind para la empresa de semiconductores Signetics, con la idea de integrar en un único chip las funciones de temporización y generación de pulsos que hasta entonces requerían varios transistores y componentes discretos. El diseño original, conocido como NE555, integra 23 transistores bipolares, 15 resistencias y 2 diodos en un encapsulado DIP de 8 patas.
Uno de los elementos clave es una cadena interna de tres resistencias de 5 kΩ, que forma un divisor de tensión y establece dos niveles de referencia internos: aproximadamente 1/3 y 2/3 de la tensión de alimentación. La explicación más extendida sobre el nombre “555” es precisamente esa cadena de tres resistencias de 5 kΩ, aunque Camenzind nunca lo confirmó de forma oficial.
Arquitectura interna del 555
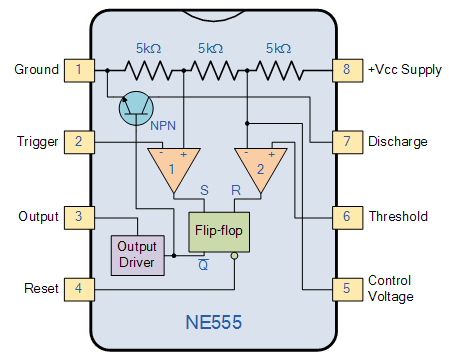
El corazón del 555 puede resumirse en cuatro bloques funcionales: divisor de tensión, dos comparadores, un biestable SR y un transistor de descarga.
- Divisor resistivo de 3×5 kΩ: genera los umbrales de 1/3 VCC y 2/3 VCC que utilizan los comparadores para decidir el estado del temporizador.
- Dos comparadores:
- El comparador de disparo (TRIGGER) conmuta cuando la tensión del condensador baja de 1/3 VCC.
- El comparador de umbral (THRESHOLD) conmuta cuando la tensión del condensador supera 2/3 VCC.
- Biestable SR (flip-flop): almacena el estado interno del temporizador y controla la salida y el transistor de descarga.
- Transistor de descarga: conectado al pin DISCHARGE, descarga el condensador de temporización cuando el biestable lo ordena, cerrando así el ciclo.
Esta estructura aparentemente sencilla permite implementar distintos modos de funcionamiento solo cambiando la forma en que se conecta un puñado de resistencias y condensadores externos.
Modos de funcionamiento: monoestable, astable y biestable
El 555 puede trabajar en tres modos básicos, que cubren la mayoría de aplicaciones prácticas: Modo monoestable (un solo pulso), Modo astable (oscilador libre) y Modo biestable (flip-flop).
Modo monoestable (un solo pulso)
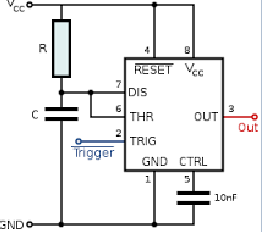
En modo monoestable, el 555 genera un único pulso de salida de duración determinada cada vez que recibe un disparo.
- Un condensador se carga a través de una resistencia cuando el circuito se dispara.
- Mientras la tensión del condensador esté por debajo de 2/3 VCC, la salida permanece en alto.
- Cuando el condensador alcanza 2/3 VCC, el comparador de umbral resetea el biestable, la salida vuelve a bajo y el transistor interno descarga el condensador.
Este modo es ideal para temporizadores, antirrebotes, generación de pulsos de ancho fijo o detección de flancos.
Modo astable (oscilador libre)
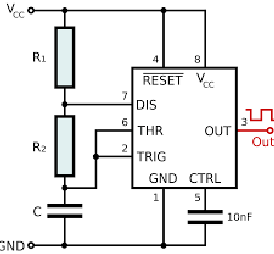
En modo astable, el 555 se convierte en un oscilador que genera de forma continua una onda cuadrada.
- El condensador se carga y descarga de forma cíclica entre 1/3 VCC y 2/3 VCC mediante dos resistencias externas y el transistor de descarga interno.
- Cada ciclo de carga y descarga produce un periodo completo de la señal de salida, con frecuencia y ciclo de trabajo determinados por los valores de R1, R2 y C.
Este modo se utiliza para generadores de reloj, destelladores de LED, señales de PWM sencillas o moduladores de tono.
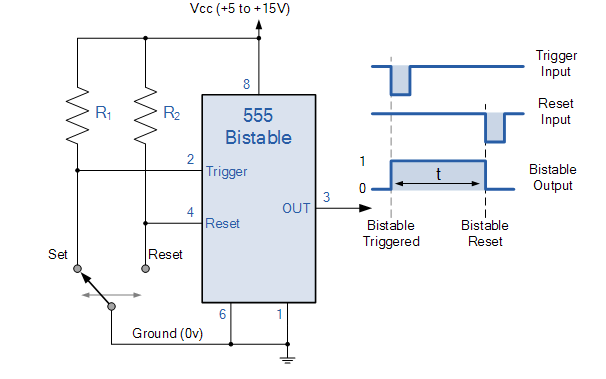
Modo biestable (flip-flop)
En modo biestable, el 555 actúa como un simple biestable SR sin necesidad de condensador de temporización
- La entrada de disparo (TRIGGER) fuerza el estado alto de la salida.
- La entrada de umbral o reset fuerza el estado bajo.
- El circuito mantiene indefinidamente el último estado hasta recibir un nuevo comando.
Es útil en aplicaciones de control, conmutación y memoria básica de estado.
Características eléctricas y variantes modernas
El NE555 bipolar clásico puede funcionar típicamente entre 4,5 V y 16 V de alimentación y suministrar corrientes de salida del orden de decenas a más de 100 mA, lo que permite atacar directamente cargas como relés pequeños, transistores de potencia o LEDs sin demasiados componentes adicionales.
Con el tiempo aparecieron versiones CMOS, como el 7555 o el TLC555, que mantienen la compatibilidad funcional pero reducen drásticamente el consumo y permiten trabajar con tensiones de alimentación más bajas. Estas versiones tienen corrientes de reposo del orden de decenas a cientos de microamperios y salidas adaptadas a lógica CMOS y TTL.
Un clásico que sigue vivo
Pese a la disponibilidad de microcontroladores muy económicos, el temporizador 555 sigue siendo una solución óptima cuando se necesita un circuito de temporización u oscilación sencillo, robusto y fácilmente calculable con lápiz y papel. Es, además, una herramienta didáctica excepcional para entender comparadores, biestables, temporización RC y diseño analógico básico.
Si estás empezando en electrónica —o si simplemente quieres disfrutar del diseño clásico de Camenzind—, construir unos cuantos circuitos con el 555 en sus tres modos básicos sigue siendo un excelente ejercicio práctico.

Debe estar conectado para enviar un comentario.