Es muy habitual encontrar videos de como modificar fuentes conmutadas AC/DC concebidas para un uso especifico, como por ejemplo cargar un smartphone que ofrecen una salida de unos 5V, para obtener otra tensión que podamos necesitar para alimentar cualquier otro dispositivo electrónico cuyo cargador por ejemplo hayamos perdido o se haya averiado . Ciertamente con esta sencilla modificación, que vamos a ver, se podrán variar el voltaje de 5V a 12V o incluso de 12V a 30V sin mayores complicaciones , usando los mínimos componentes y sobre todo reutilizando con cosas que quizás ya no usemos.
Como punto importante, a destacar es que con el simple cambio modificamos la tensión de salida de la fuente hasta un limite que podria llegar incluso hasta los 30v, pero la corriente que sea capaz de suministrar será la misma, es decir si la fuente de 500mA , esa será la corriente máxima que pueda soportar la fuente modificada .
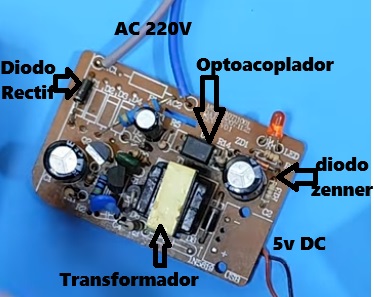
Un esquema real
Antes de empezar veamos un ejemplo de una fuente real 220/5v DC cuyo esquema interno se ha obtenido por ingeniería inversa
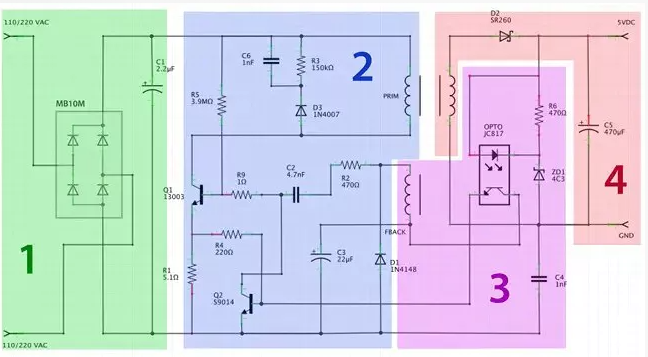
El circuito proporciona hasta 10W de potencia, suficiente para cargar dispositivos como tabletas o iPads. Se trata de una fuente conmutada del tipo flyback converter auto-oscilante, la cual aísla la red eléctrica mediante un transformador y un circuito óptico, proporcionando seguridad siempre que se utilicen componentes de calidad. No obstante, se deben tomar precauciones debido a los altos voltajes DC presentes en el circuito.
El funcionamiento del circuito se divide en cuatro etapas: 1-rectificación y filtrado, donde un puente de diodos y un condensador convierten la corriente alterna en corriente continua; 2-oscilador y driver primario, que usa transistores para conmutar el transformador; 3-circuito de retroalimentación, que regula la salida mediante un optoacoplador y un devanado auxiliar; y 4-adecuación del voltaje de salida, donde un diodo Schottky se encarga de la rectificación final.
La parte que nos va a ser útil para nuestro propósito es la Etapa 3,circuito de retroalimentación, donde cualquier desvío en el voltaje de salida se corrige a través de dos señales, la primera viene del devanado secundario marcado como FBACK y la segunda viene de un opto-acoplador. Las dos señales son tomadas de tal manera que existe un aislamiento eléctrico entre el voltaje de salida y el voltaje de entrada. El aislamiento es óptico en el caso del opto-acoplador y magnético en el caso del transformador. El opto-acoplador usa un diodo zener de 4.3 voltios en su entrada, que sumado a la caída de voltaje de 0.9 voltios del propio dispositivo suman aproximadamente 5.2 voltios. Si el voltaje de salida sube más de 5.2 voltios, la salida del dispositivo opto-acoplador disminuye su resistencia aparente y esto modifica el ciclo de trabajo de la onda que alimenta el transformador.
Principios Básicos: ¿Cómo se Regula el Voltaje en una fuente conmutada a groso modo?
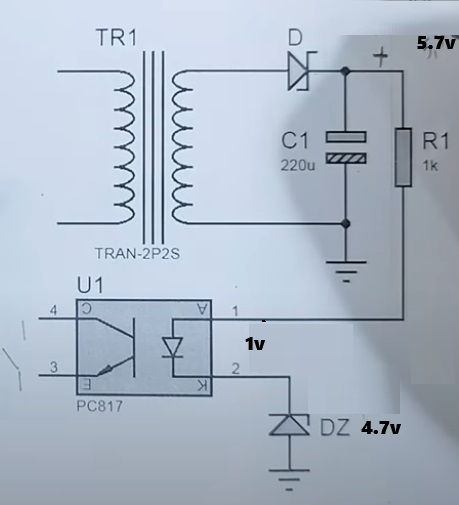
Bien hemos visto un esquema real anteriormente, ahora revisemos algunos conceptos esenciales. Las fuentes de alimentación conmutadas, como los cargadores de móviles, controlan su voltaje de salida mediante un optoacoplador y un diodo Zener.
El circuito de regulación inicia con un voltaje bajo, por ejemplo, 1V, y aumenta progresivamente hasta que el optoacoplador y el diodo Zener entran en acción. Por ejemplo, si utilizamos un diodo Zener de 4.7V y el optoacoplador requiere 1V, el sistema se estabiliza cuando el voltaje supera los 5.7V. En este punto, el transistor del circuito de control recibe una señal que detiene el incremento de voltaje.
Modificando el Voltaje de Salida Para cambiar el voltaje de salida, reemplazaremos el diodo Zener por otro con un valor diferente. Sigamos estos pasos:
- Confirmamos el voltaje de salida del cargador (aproximadamente 5V, en nuestro caso, 5.4V).
- Sustituimos el diodo Zener original por uno de 10V.
- Verificamos el nuevo voltaje de salida, que ahora será de aproximadamente 11V, debido a la interacción con el optoacoplador.
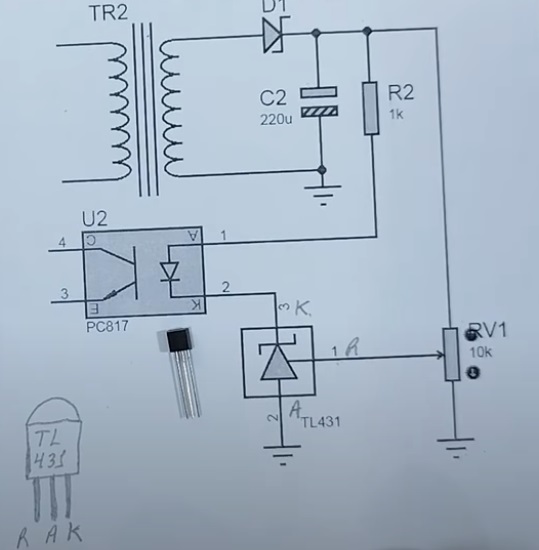
Implementando un Voltaje Ajustable Si queremos un voltaje variable, utilizaremos un TL431, un diodo Zener programable de tres terminales (referencia, ánodo y cátodo):
- Conectamos el cátodo del TL431 al cátodo del diodo Zener original.
- Su ánodo se conecta al ánodo del diodo original.
- El pin de referencia se enlaza con el terminal central de un potenciómetro o trimmer.
Antes de soldar, ajustamos el potenciómetro a la mitad de su valor total para mayor seguridad. Por ejemplo, si es de 5 kΩ, lo fijamos en 2.5 kΩ. Luego, instalamos el TL431 y verificamos las conexiones.
Resultados y Consideraciones Finales Al probar nuestro circuito, observamos que podemos variar el voltaje entre diferentes valores según nuestras necesidades, por ejemplo:
- 4.3V
- 9V
- 12V
Es fundamental asegurarnos de no exceder la capacidad de los componentes, especialmente la de la tensión máxima del condensador de salida (en este caso, 16V).
Con este método, podemos readaptar casi cualquier cargador para diferentes proyectos electrónicos de manera segura y eficiente de modo que reusemos estos que de otra manera tal vez estaban olvidado en el fondo de un cajón.


Debe estar conectado para enviar un comentario.