¿Tienes un mando a distancia y un receptor de infrarrojos rescatado de algún aparato viejo, pero no sabes cómo conectarlo al ESP32? No te preocupes: aunque no se vea el modelo o fabricante, es posible identificar los pines con un poco de observación y unas mediciones básicas. Solo eso sí: no conectes nada al azar o podrías quemarlo. Vamos paso a paso.
1. Empezar con una suposición razonable
En la mayoría de receptores IR tipo TSOP de 3 pines, mirando la cápsula de frente (el lado plano hacia ti y las patillas hacia abajo), el orden más común es:
- Izquierda: OUT (señal)
- Centro: GND (masa)
- Derecha: VCC (alimentación, normalmente 5 V o 3,3 V)
No obstante, hay versiones que cambian este orden, así que tómalo solo como hipótesis inicial, no como regla fija.
2. Identificar primero la masa (GND)
Es el paso más seguro. Si el receptor tiene carcasa metálica, muchas veces está unida eléctricamente al pin de masa. También puedes comprobarlo con un multímetro en modo continuidad: si un pin tiene conexión directa al negativo del conector de alimentación, ése es tu GND. Cuando lo tengas localizado, márcalo para no confundirlo después.
3. Determinar cuál es VCC y cuál es la salida
Con GND ya identificado, quedan dos pines por probar. Usa una fuente regulada con limitador de corriente (por ejemplo 5 V y 20 mA). Conecta masa al pin central y selecciona uno de los otros dos como VCC. Añade una resistencia en serie de unos 100–220 Ω por seguridad.
Mide el tercer pin respecto a GND:
- Si en reposo ves algo cercano a VCC (por ejemplo 4–5 V) que cae momentáneamente a 0 V cuando apuntas un mando IR y pulsas botones, ese pin es la salida (OUT).
- Si no pasa nada, cambia el pin de VCC al otro extremo y repite.
Estos receptores suelen tener salida activa en bajo, es decir, la salida está “en alto” con pull‑up y baja cuando detecta una señal IR.
4. Algunas pistas visuales
Aunque no veas el modelo, ciertos detalles ayudan:
- El lado plano del encapsulado suele marcar la orientación y el pin 1.
- Muchos modelos (TSOP1738, TSOP4838, etc.) comparten el patrón OUT–GND–VCC.
Comparar tu receptor con imágenes puede aclararte mucho.
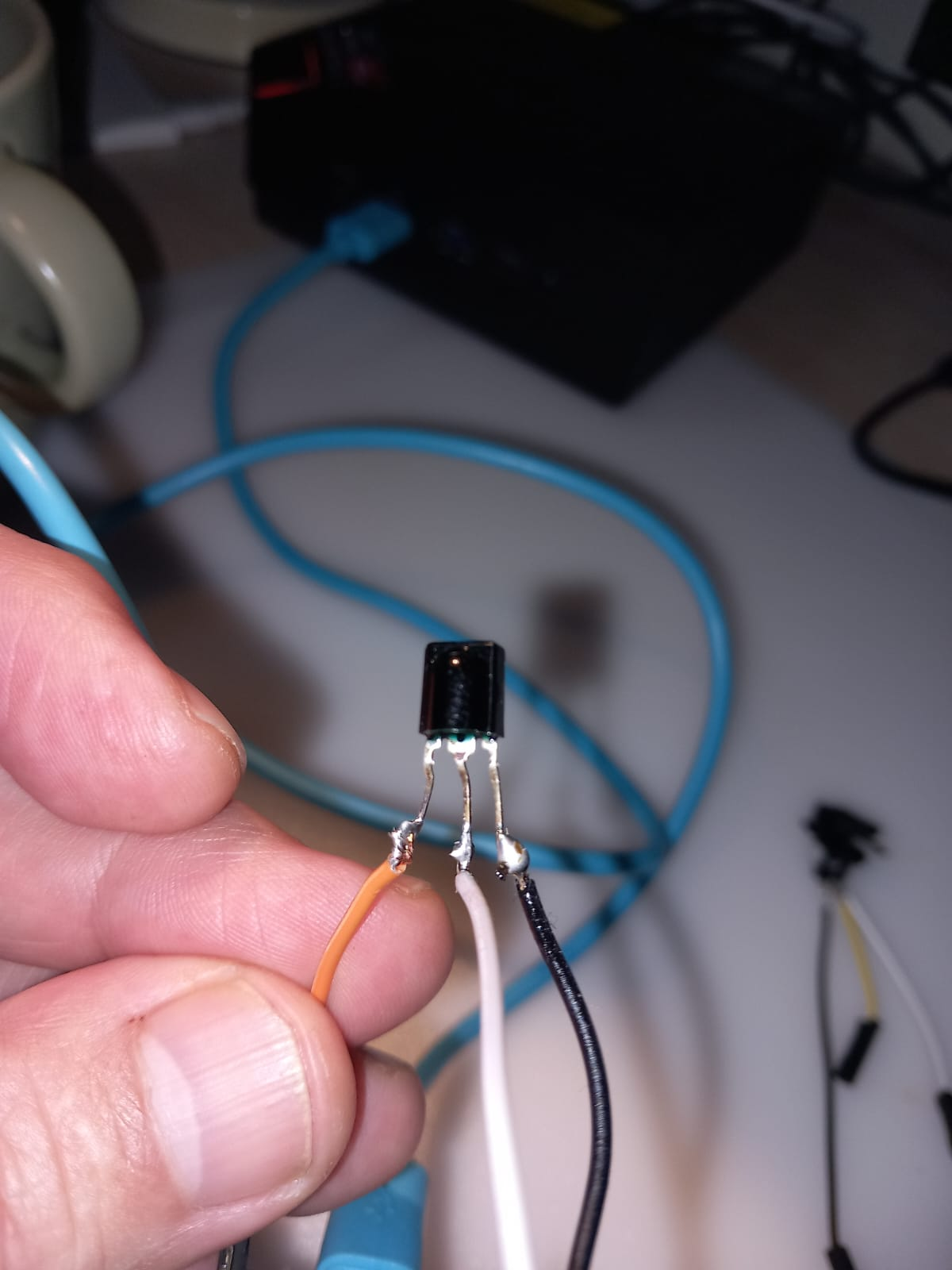
5. Montaje de prueba visual
Si quieres confirmar el pinout de forma sencilla, monta un pequeño circuito: VCC, GND y un LED con resistencia (1 kΩ) conectado a la probable salida. Si el LED parpadea o se enciende al pulsar un botón del mando, habrás identificado correctamente la salida.
Caso práctico: comprobando con resistencias
Supón que ya has identificado que el pin central es GND (porque está unido a la carcasa) y mides los otros dos con un comprobador de componentes o un polímetro en escala de ohmios:
- Un pin da unos 35 kΩ en ambos sentidos → comportamiento casi simétrico, típico de la salida (OUT).
- El otro muestra 5 kΩ en un sentido e infinito en el otro → comportamiento asimétrico, típico del pin de VCC, por las protecciones internas contra polaridad invertida.
Así, mirando la cápsula de frente (lado plano hacia ti, patillas hacia abajo):
| Posición | Función |
|---|---|
| Izquierda | OUT (salida) |
| Centro | GND (masa) |
| Derecha | VCC (3–5 V) |
Verificación final
Conecta VCC (derecha) a 5 V o 3,3 V y GND (centro) a masa.
Pon una resistencia de 10 kΩ entre VCC y OUT (izquierda) como pull‑up.
Mide el pin de salida con un multímetro:
- En reposo: tensión cercana a VCC.
- Al recibir señal del mando: caídas rápidas o parpadeos de voltaje.
Si todo coincide y el consumo es bajo (0,5–5 mA), ¡ya has identificado correctamente tu receptor y puedes usarlo directamente con un pin digital del ESP32!
Prueba final con código
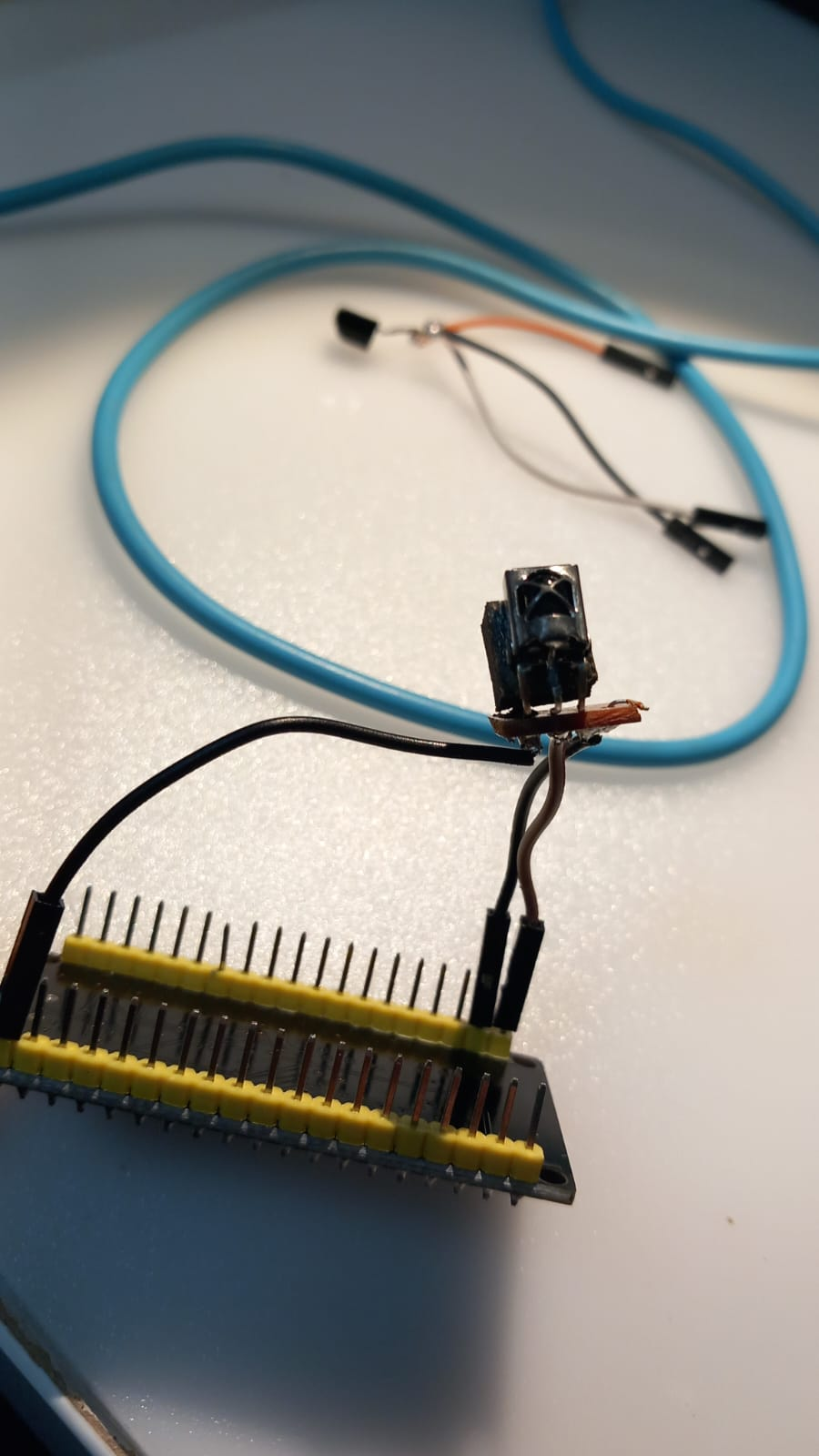
Una vez tenemos el montaje , lo ideal es hacer la prueba con nuestro microcontrolador. En este caso concreto usaremos un ESP32, pero el siguiente código debería funcionar con caquier variante Arduino ya que se usa una librería genérica.
Respecto al mando a emplear podemos usar cualquier mando de algun equipo que ya no usemos y tengamos olvidado. Es fundamental comprobar con una cámara que el diodo de infrarrojo del mando emite luz infraroja al pulsar cualquier botón del mando.
Bien, una vez montado el receptor de infrarojos con la toma de GND al pin central , el terminal de la izquierda a un GPIO ( en nuestro caso C23) y el terminal de la derecha a 3.3v , es momento de probar su salida , para lo cual podemos usar el siguiente código:
#include <IRremote.hpp>#define IR_PIN 23uint32_t ultimoCodigo = 0;unsigned long ultimoTiempo = 0;void setup() { Serial.begin(115200); IrReceiver.begin(IR_PIN, ENABLE_LED_FEEDBACK); Serial.println("✅ IR ANTI-RUIDO FINAL - Pulsa MANDO TV");}void loop() { if (IrReceiver.decode()) { uint32_t codigo = IrReceiver.decodedIRData.decodedRawData; uint8_t bits = IrReceiver.decodedIRData.numberOfBits; // ANTI-RUIDO: 30+ bits, código nuevo if (bits >= 30 && codigo != 0 && (codigo != ultimoCodigo || millis() - ultimoTiempo > 400)) { Serial.print("🎮 0x"); Serial.print(codigo, HEX); Serial.print(" ("); Serial.print(bits); Serial.println(" bits)"); ultimoCodigo = codigo; ultimoTiempo = millis(); } IrReceiver.resume(); } delay(150);}//ejemplo de energy system//play 0xFF00BF00 (32 bits)//ch- 0xFE01BF00 (32 bits)//ch+ 0xFD02BF00 (32 bits)
Obviamente si «pasa esta prueba», podemos usar librerías mas específicas según el microcontrolador porque existen librerías especificas para ESP8266 o ESP32.
Algunos de los receptores mas habituales en electrónica de consumo
Por el comportamiento de detectar 38 kHz, ruido ambiental, pinout OUT-GND-VCC, los receptores TSOP son lo mas estándar de Vishay.
Modelos exactos (o equivalentes)
| TIPOS | Modelo probable | Especificaciones |
|---|---|---|
| tipo 1 | TSOP4838 o TSOP1738 | 38 kHz, 2.7-5.5V, OUT-GND-VCC |
| tipo 2 | TSOP4838TT1 o VS1838B | Igual, encapsulado plano negro típico AliExpress |
Ambos son idénticos funcionalmente:
- Frecuencia: 38 kHz (estándar mandos TV/DVD).
- Pinout: 1=OUT, 2=GND, 3=VCC (frontal ventana hacia ti).
- Salida: Baja al detectar (activo LOW).
- Sensibilidad: 10-15m con buen mando.
Datasheet recomendado
Descarga TSOP48xx Vishay:
Equivalentes genéricos (AliExpress/Amazon)
- TSOP1738 / TSOP1838: Mismo pinout, 38 kHz.
- VS1838B: Clon chino idéntico, 0,20€ unidad.
- HX1838: Módulo con resistencia incluida (no suelto).

Debe estar conectado para enviar un comentario.