Conectar una pantalla TFT pequeña a un ESP32 parece, sobre el papel, una tarea sencilla: cuatro cables SPI, una librería y listo. La realidad, como suele pasar en electrónica, es bastante distinta. En este artículo quiero contar el proceso completo, incluyendo los errores, las dudas y la solución final estable, porque estoy seguro de que le ahorrará tiempo a más de uno.
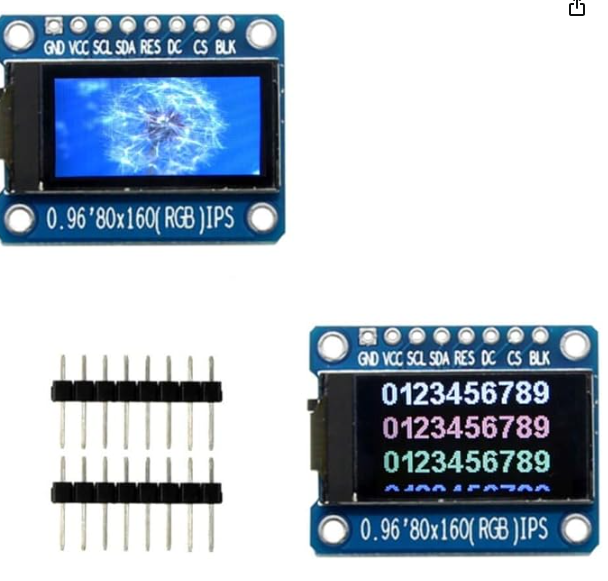
La pantalla en cuestión es una TFT IPS de 0,96 pulgadas, resolución 80×160, (exactamente este modelo https://amzn.to/4p0DjKF ) basada en el controlador ST7735S, muy similar (y compatible) con la conocida Adafruit Mini TFT 0.96″ 160×80. El microcontrolador es un ESP32 DevKit con módulo ESP-WROOM-32.
1. El hardware de partida
El montaje inicial estaba compuesto por:
- ESP32 DevKit (ESP-WROOM-32)–> comprado en Amazon por unos 11.99€
- Pantalla TFT IPS 0,96” 80×160 SPI (ST7735S)–>comprada en Amazon por unos 6.99€
- Comunicación SPI
- Alimentación desde el propio ESP32
Un punto importante: aunque el módulo TFT permite alimentación a 5 V porque incorpora un regulador en la propia placa, finalmente decidí alimentarlo a 3,3 V directamente desde el ESP32. Es más limpio, más seguro y suficiente para un funcionamiento correcto.
2. Primer obstáculo: el ESP32 no programaba
Antes incluso de ver algo en pantalla, apareció el primer problema serio:el ESP32 no se dejaba programar. El Arduino IDE devolvía errores del tipo:
Failed to connect / no serial data received / exit status 2
En Windows, el chip CP2102 aparecía con el clásico triángulo amarillo en el Administrador de dispositivos. La solución fue sencilla, pero nada obvia para quien empieza con un PC sin todo bien configurado:
- Instalar el driver oficial CP210x USB-to-UART de Silicon Labs
- Seleccionar el puerto COM correcto en el Arduino IDE
- Bajar la velocidad de carga a 115200 baudios
- Desconectar cualquier periférico hasta conseguir un programa mínimo estable (un Blink)
Una vez superado esto, el ESP32 empezó a comportarse como debía.
3. Pantalla encendida… pero en negro
El siguiente síntoma fue frustrante: la pantalla encendía la retroiluminación, pero no mostraba absolutamente nada.
El primer intento fue con la popular librería TFT_eSPI, que suele funcionar muy bien con ESP32. Sin embargo, aquí empezaron los problemas:
- El archivo
User_Setup_Select.hestaba prácticamente todo comentado - No había un controlador ST7735 correctamente definido
- Los pines SPI no coincidían con los que estaba usando
Incluso después de configurar explícitamente ST7735 y definir pines personalizados (MOSI, SCLK, CS, DC, RST), ningún ejemplo funcionaba, ni siquiera los más básicos.
4. ¿La habré dañado alimentándola a 5 V?
En ese punto surgió la duda clásica:“¿Habré quemado la pantalla?”
Investigando el modelo exacto, encontré que este tipo de módulos incluye un regulador de tensión, exactamente igual que los de Adafruit, diseñados para:
- VCC = 5 V
- Lógica SPI a 3,3 V
Conclusión: la probabilidad de daño era baja. El problema no era eléctrico, sino de driver y configuración.
5. El verdadero lío: los buses SPI del ESP32
Aquí estaba una de las claves del problema.
El ESP32 dispone de dos buses SPI por hardware:
- VSPI (por defecto):
- SCK = GPIO18
- MOSI = GPIO23
- MISO = GPIO19
- HSPI (alternativo):
- SCK = GPIO14
- MOSI = GPIO13
- MISO = GPIO12 / 19 (configurable)
Yo ya tenía un lector de tarjeta SD funcionando en VSPI, y no quería tocarlo. Intentar colgar la TFT del mismo bus solo complicaba la configuración.
La solución fue clara: 👉 dedicar HSPI exclusivamente a la pantalla TFT.
6. Cambio de estrategia: librerías de Adafruit
La pista definitiva llegó revisando una reseña del propio módulo TFT, donde alguien lo hacía funcionar como si fuera una Adafruit Mini TFT 0.96″ 160×80.
Eso implicaba dos cosas importantes:
- Usar las librerías:
Adafruit_GFXAdafruit_ST7735
- Inicializar la pantalla con:
tft.initR(INITR_MINI160x80);
Este detalle es crítico: no todas las pantallas ST7735 se inicializan igual.
Tras instalar ambas librerías desde el gestor del Arduino IDE, todo empezó a encajar.
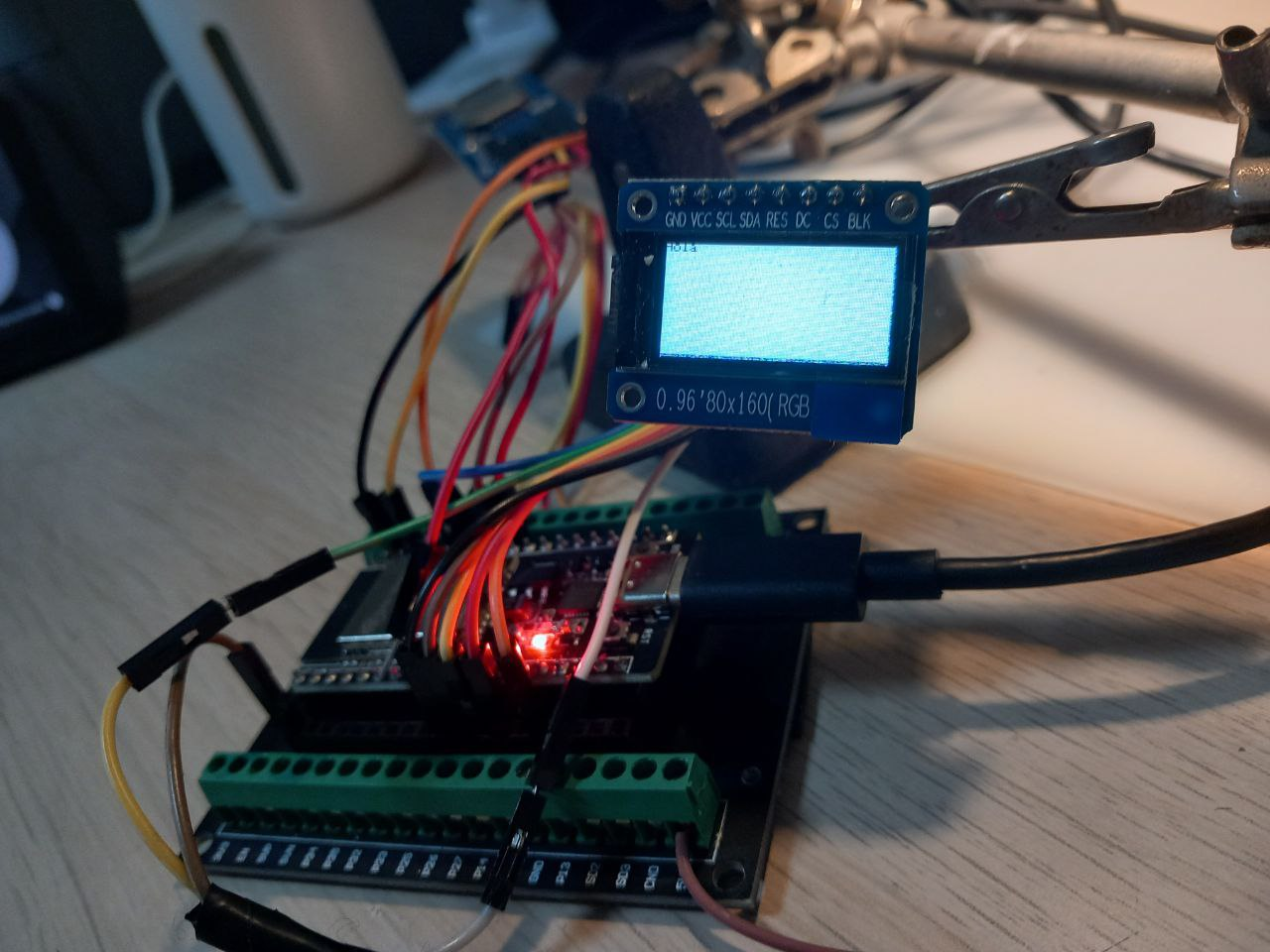
7. Conexión definitiva de la pantalla al ESP32
Separando claramente los buses SPI, el esquema final quedó así:
SPI
- VSPI → Tarjeta SD
- HSPI → Pantalla TFT
Conexiones TFT → ESP32
- GND → GND
- VCC → 3V3
- SCL (SCK) → GPIO14
- SDA (MOSI) → GPIO13
- CS → GPIO26
- DC → GPIO27
- RES → GPIO12
- BLK → 3V3 (retroiluminación permanente)
De este modo, una TFT y un futuro lector/grabador de SD pueden funcionar simultáneamente sin interferencias.
8. Código final que funciona (por fin)
Una prueba basica una vez instaladas desde el propio IDE de Arduino las librerías de Adafruit (Adafruit_GFX.h y Adafruit_ST7735) es el siguiente código funcional:
#include <SPI.h>
#include <Adafruit_GFX.h>
#include <Adafruit_ST7735.h>
#define TFT_CS 26
#define TFT_DC 27
#define TFT_RST 12
Adafruit_ST7735 tft = Adafruit_ST7735(TFT_CS, TFT_DC, TFT_RST);
void setup() {
// Usar HSPI con 14 (SCK) y 13 (MOSI)
SPI.begin(14, 19, 13); // SCK=14, MISO=19 (no usado), MOSI=13
tft.initR(INITR_MINI160x80); // 0.96" 160x80
tft.setRotation(3);
tft.fillScreen(ST77XX_RED);
delay(1000);
tft.fillScreen(ST77XX_GREEN);
delay(1000);
tft.fillScreen(ST77XX_BLUE);
delay(1000);
tft.fillScreen(ST77XX_BLACK);
tft.setTextColor(ST77XX_WHITE);
tft.setCursor(0, 0);
tft.println("Hola");
}
void loop() {}
!Funciona !, ya se ven colores al prinicpio a pantalla completa y al final de la secuencia un texto, pero como inconveniente del código anterior es que el texto que se muestra es demasiado pequeño para poderse leer.
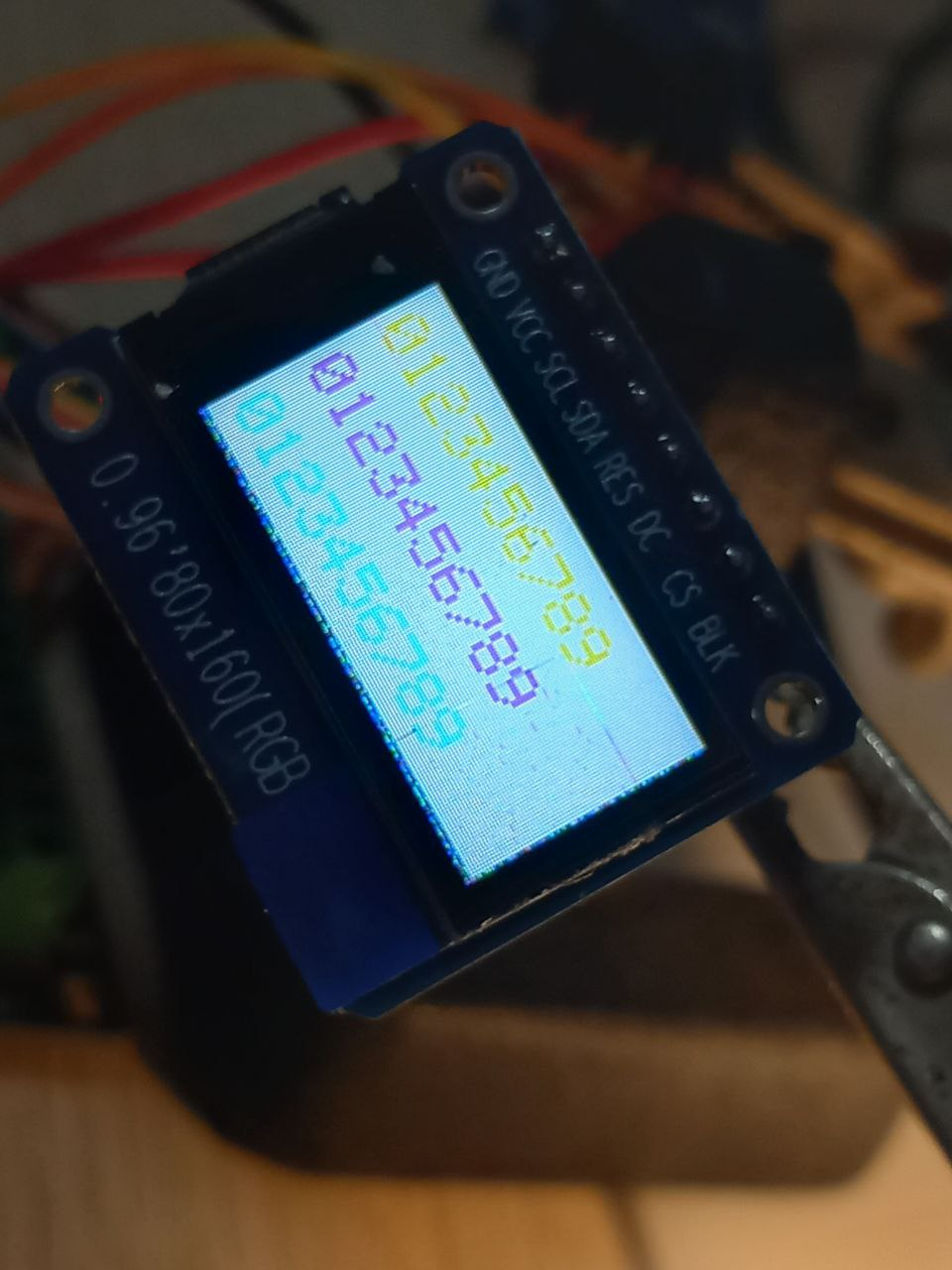
Esta claro que el codigo anterior se puede mejorar. Este es el sketch de prueba definitivo, limpio y funcional:
#include <SPI.h>
#include <Adafruit_GFX.h>
#include <Adafruit_ST7735.h>
#define TFT_CS 26
#define TFT_DC 27
#define TFT_RST 12
Adafruit_ST7735 tft = Adafruit_ST7735(TFT_CS, TFT_DC, TFT_RST);
void setup() {
// HSPI: SCK=14, MISO=19, MOSI=13
SPI.begin(14, 19, 13);
tft.initR(INITR_MINI160x80);
tft.setRotation(3);
tft.fillScreen(ST77XX_BLACK);
tft.setTextSize(2);
tft.setTextColor(ST77XX_RED, ST77XX_BLACK);
tft.setCursor(5, 10);
tft.print("0123456789");
tft.setTextColor(ST77XX_GREEN, ST77XX_BLACK);
tft.setCursor(5, 35);
tft.print("0123456789");
tft.setTextColor(ST77XX_BLUE, ST77XX_BLACK);
tft.setCursor(5, 60);
tft.print("0123456789");
}
void loop() {
}
El resultado: imagen estable, colores correctos y orientación perfecta.
9. Conclusiones importantes
Si estás intentando conectar una pantalla TFT pequeña a un ESP32, quédate con estas ideas clave:
- El ESP32 tiene dos buses SPI: aprovéchalos
- No todas las pantallas ST7735 usan la misma inicialización
- La librería Adafruit_ST7735 es a veces más fiable que TFT_eSPI
- Que la pantalla se ilumine no significa que esté bien configurada
- Alimentar a 3,3 V suele ser la opción más segura
En el próximo proyecto, esta TFT ya no será un problema… pero este “viaje” merecía ser contado.












Debe estar conectado para enviar un comentario.