Muy resumidamente LattePanda es un un mini ordenador completo con Arduino integrado que ejecuta la versión completa de Windows 10. Incluye todo lo que un PC normal tiene pudiendo hacer cualquier cosa que hace un PC normal. Es ademas compatible con casi todos los aparatos que conoce como impresoras, joysticks, cámaras y más. Todos los periféricos que funcionan en su PC funcionaran en LattePanda.
Ademas LattePanda viene pre-instalado con una edición completa pre-activada de Windows 10.
Utilizando las API existentes, puede desarrollar sus propios proyectos de software y hardware en LattePanda como lo haría en un PC normal usando C #, JavaScript, Ruby y así sucesivamente de modo que no necesita su ordenador portátil para construir una aplicación con el
Pero no sólo puede ser utilizado como un ordenador normal de bajo costo con Windows pues LattePanda también está diseñado con un compatible co-procesador Arduino, lo que significa que se puede utilizar para controlar y detectar el mundo físico, al igual que una placa Arduino!
Si usted es un desarrollador de Windows, un desarrollador de la IO, un fanático de hardware de bricolaje, diseñador interactivo, robótica genio o un fabricante, LattePanda puede ayudar a su proceso creativo con los proyectos informáticos físicos!
LattePanda puede ejecutar la versión completa de Windows 10 y Ubuntu.
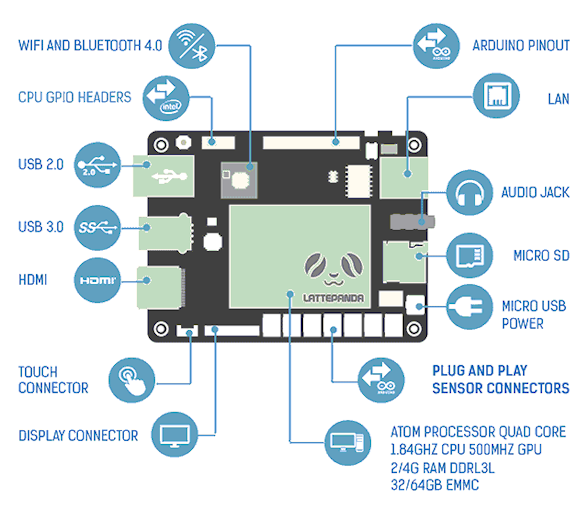
ESPECIFICACIÓNES
- Procesador: 1,8 GHz Intel Cherry Trail Z8300 Quad Core
- Funcionamiento del sistema: Pre-instalado preactivado completa edición de Windows 10 (versión Inicio)
- Ram: 2 / 4GB DDR3L
- Capacidad de almacenamiento: 32 / 64GB
- USB: 1 x USB 3.0, USB 2.0 x 2
- HDMI de salida de vídeo y el puerto Ethernet
- 3,5 mm de salida de audio jack
- Ranura para tarjeta Micro SD
- Toque y Conector de pantalla
- Plug and Play Conectores de sensor
- WiFi y Bluetooth 4.0
- Coprocesador: ATmega32u4
- GPIO: 2 GPIO de chips Intel, 20 GPIO para Arduino
- Potencia: 5v / 2A
- Dimensiones: 3.46 «x2.76»
- Peso: 100 g
Pines
Debajo de cuadros es un diagrama básico que muestra todos los pines del bus de expansión:
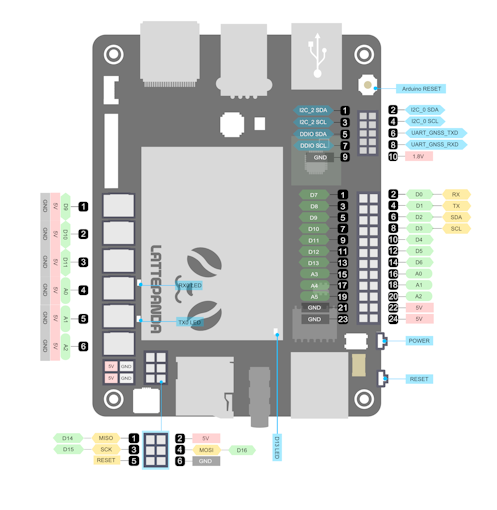
Distribución de los pines en el área U1 se asignan a la base de X-Z8300. Por el momento, no hay información disponible.
Distribución de los pines en el área de U2 se asignan al núcleo ATmega32u4.Cada uno de los 20 pines digitales (A0 – A5, D0 – D13) en la zona de U2 se puede utilizar como una entrada o salida, cada uno operando a 5 voltios. Cada salida puede fijar o recibir 40 mA y cada uno tiene una resistencia de pull-up (desconectada por defecto) de 20-50k ohmios.
Precaución: Superior a 40 mA en cualquier pin de E / S puede causar daños permanentes en el ATmega32u4.
Algunos pines tienen funciones especializadas:
Entradas analógicas: A0 – A5, A6 – A11 (en D4, D6, D8, D9, D10, D12 y). El LattePanda tiene 12 entradas analógicas, etiquetados A0 a A11, todos los cuales también pueden ser utilizados como I / O digital. Cada pin tiene una resolución de 10 bits (es decir, 1024 valores diferentes). Por defecto se miden desde el suelo a 5 voltios.
De serie: D0 (RX) y D1 (TX). Se utiliza para recibir (RX) y transmitir datos en serie (TX) TTL.
Las interrupciones externas: D3 (interrumpir 0), D2 (interrumpir 1), D0 (interrumpir 2), D1 (interrumpir 3) y D7 (interrumpir 4). Estos pines pueden ser configurados para desencadenar una interrupción en un valor bajo, un flanco ascendente o descendente, o un cambio en el valor.
PWM: D3, D5, D6, D9, D10, y D13 proporcionan salida PWM de 8 bits.
SPI: D16 (MOSI), D14 (MISO), D15 (SCK).
LED: D13 Hay un LED integrado impulsado por pin digital 13. Cuando el valor del pin es alto o bajo
TWI: D2 (SDA), D3 (SCL).
Otros pines de la placa:
Reset: Lleva a este BAJA línea para reiniciar el microcontrolador. Normalmente se utiliza para añadir un botón de reinicio para escudos que bloquean la una en la mesa.
¿Cuál es el propósito de este proyecto?
En este ejemplo vamos a aprender, cómo nos comunicamos entre Arduino (chip de Arduino interna en LattePanda) y Microsoft Visual Studio y envían los datos desde el Arduino para utilizar una aplicación de Windows. Aquí vamos a medir la temperatura y humedad ambiental y enviar los datos del sensor de DHT Thingspeak.
Cómo acceder a la disposición de patillas de Visual Studio
LattePanda.Firmata es una biblioteca de código abierto Firmata proporcionada por LattePanda, que es adecuado para aplicaciones de Windows desarrollado en Visual Studio. Esta clase le permite controlar Arduino GPIO desde aplicaciones de Windows, con funciones que incluyen:
- La lectura y escritura a los pines digitales
- La lectura de las entradas analógicas
- El control de servomotores
- El envío de datos a los dispositivos y los dispositivos de recepción de formularios de datos a través del bus I2C
Para este proyecto, he hecho algunos cambios en la biblioteca Firmata de datos del sensor DHT leer o cualquier otro sensor.
3 pasos para su proyecto Arduino remoto
- Descarga e instalación de Visual Studio 2015
- Configurar el Arduino (Es pre-instalado, a menos que cambiara el programa de Arduino)
- Crear un proyecto o utilizar el proyecto de ejemplo
Descarga e instalación de Visual Studio 2015
En el primer paso, es necesario instalar Visual Studio en LattePanda. No se instala por defecto.
- Descargar Visual Studio 2015 e instalarlo.
- Activar el modo de programador en su sistema operativo, para este fin, vaya a Configuración> Actualización y seguridad> en la sección para desarrolladores> Selección de Modo desarrollador
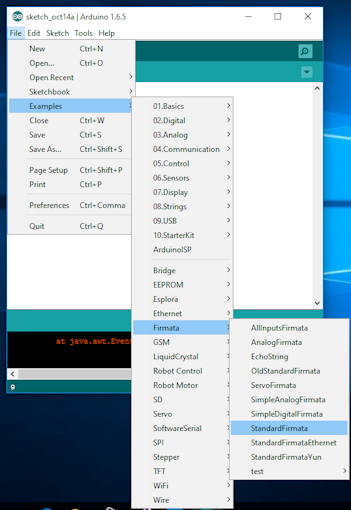
Estableció el Arduino
- Descargar este archivo y abra el archivo en Arduino. (Este archivo reemplaza con
StandardFirmata. Algunos cambios se han hecho en este archivo)
- Agregar biblioteca sensor de Adafruit DHT a Arduino.
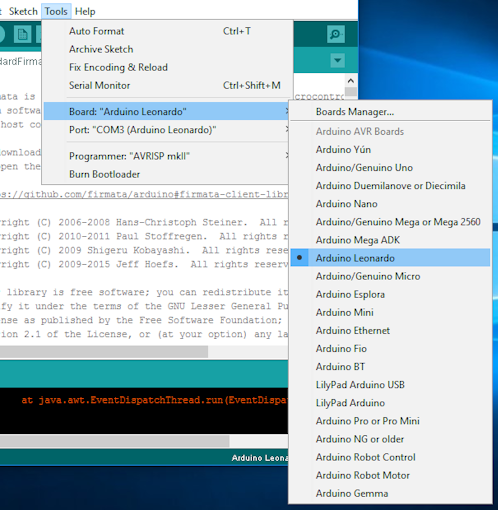
- Seleccione
Arduino LeonardodelBoardsección. A continuación, seleccione el puerto COM correcto, cargar el último boceto.

Cableado
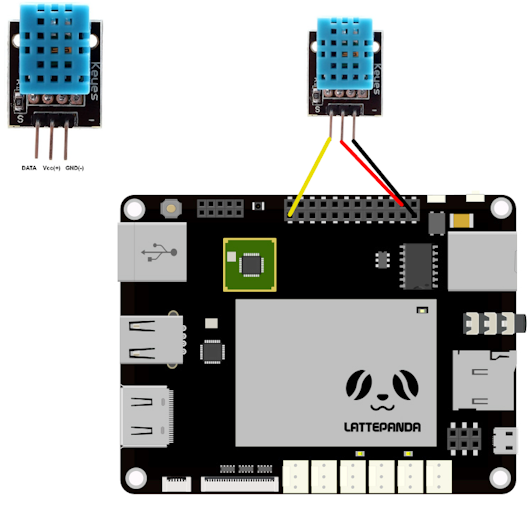
El objetivo de este proyecto es leer los datos de temperatura y humedad por el sensor DHT11 conectado a LattePanda(se puede utilizar en lugar de DHT21 o DHT22).
El sensor se debe conectar como en la imagen siguiente ,es decir el pin de la izquierda (Data) al terminal D7 de LattePanda, el terminal central del sensor al pin +5V de LattePanda y por ultimo el terminal de la derecha al ping de GND de LattePanda.
Leer Temperatura y Humedad
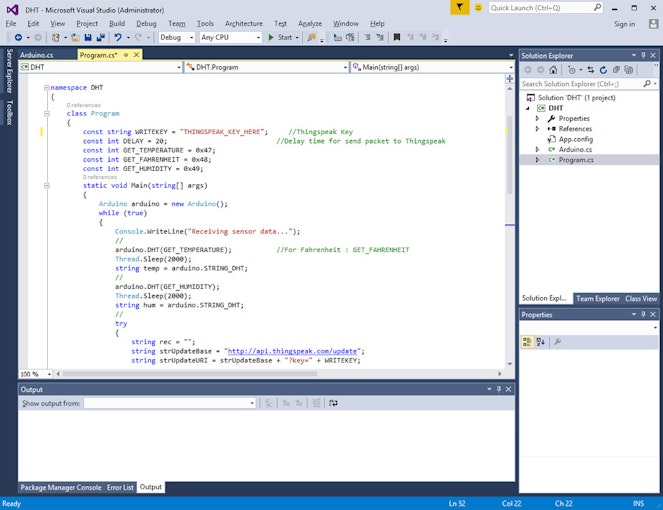
Descargar este archivo y abra el archivo con Microsoft Visual Studio.Registrarse en Thingspeak y crear un nuevo canal con dos campos. ( Field 1de la temperatura y Field 2 de la humedad). Después Save Channel , en la API Keys pestaña, copia Key valor y pegar en Program.cs archivo en lugar deTHINGSPEAK_KEY_HERE .
Guardar el archivo y haga clic Start botón. La salida será como se muestra a continuación:
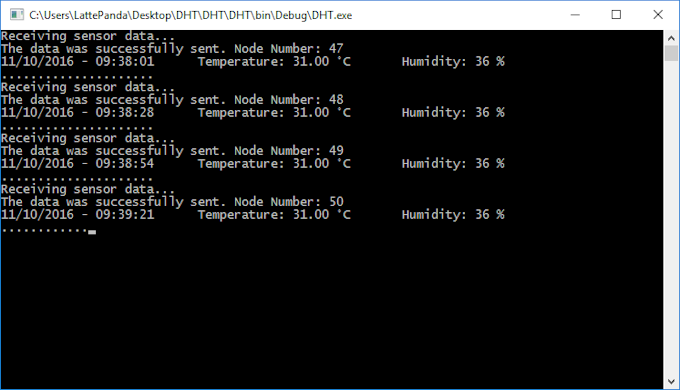
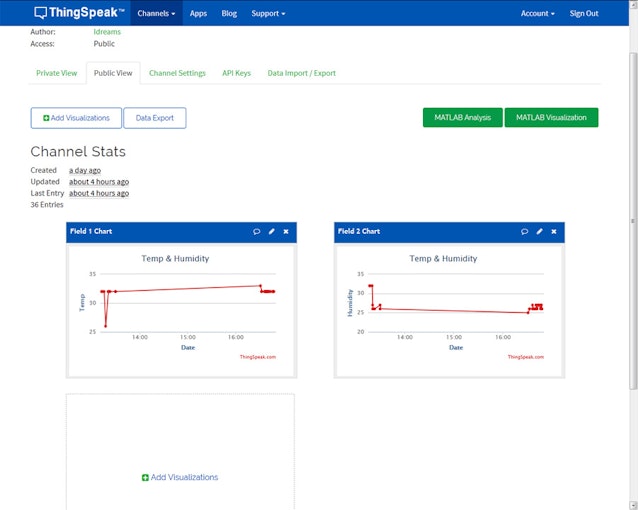
Al final, los datos se pueden ver en el servidor deThingspeak apareceran como se muestra a continuación:
Recursos
- http://www.lattepanda.com/docs/
- https://learn.adafruit.com/dht/overview
- DHT C # Aplicación Descargar DHT.zip

{kind=link}
Debe estar conectado para enviar un comentario.