
Otro ejemplo es el juguete de Mattel Mindflex (~ $ 75).

Ambos productos licencia de su tecnología EEG de NeuroSky, una empresa que también vende su propia interfaz cerebro-ordenador de grado de investigación, el modo de pensar ($ 200). Lo que la comunidad hacker ha descubierto, sin embargo, es que, con un poco de retoques, los $ 75 dólares Mindflex puede hacerse a comportarse muy parecido a su contraparte más cara.
Las instrucciones completas siguen a continuación :https://vimeo.com/10184668
Necesitará:
- 1 x Mindflex
- 3 pilas AAA para el auricular
- 1 x Arduino (cualquier variedad), con cable USB
- 2 x 12 «longitudes de cable de conexión de núcleo sólido (alrededor de # 22 o # calibre 24 es el mejor).
- Un PC o Mac para controlar los datos en serie
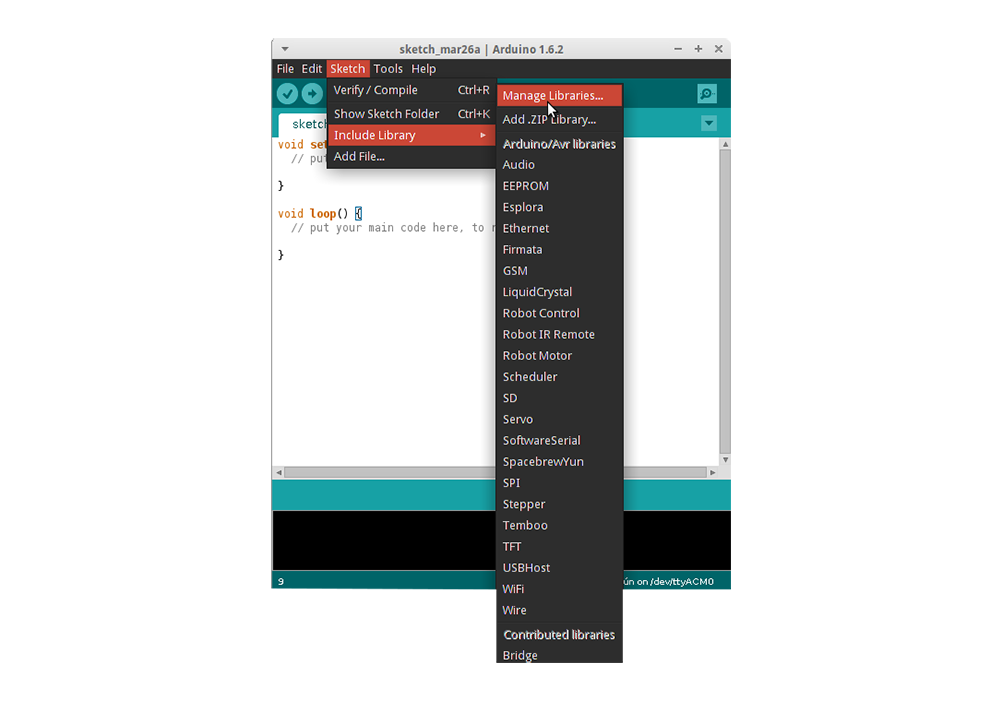
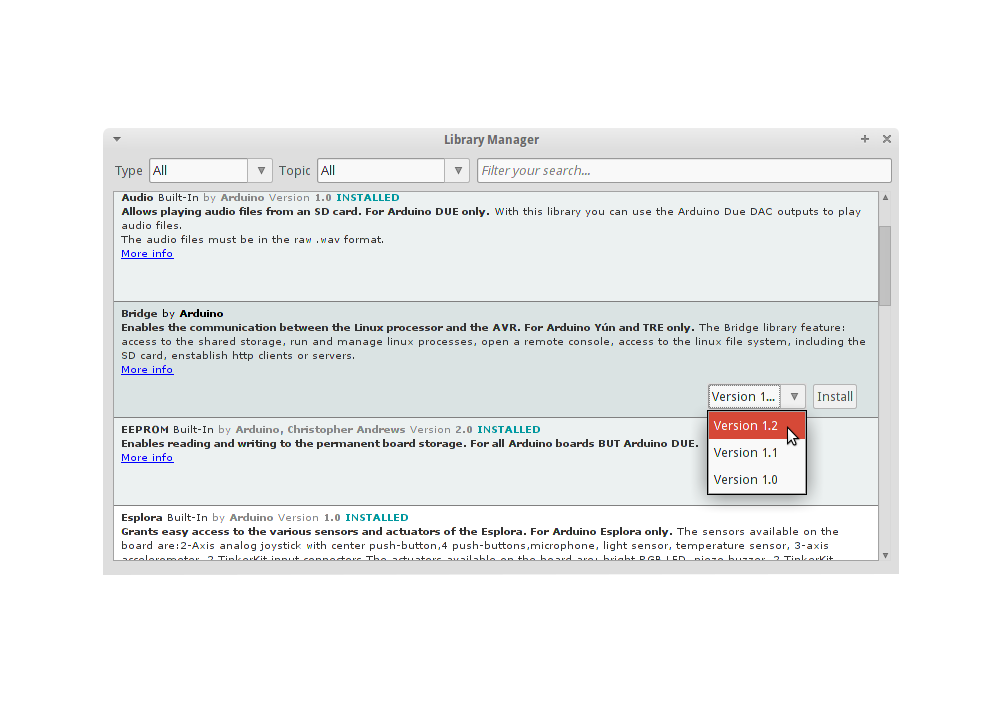
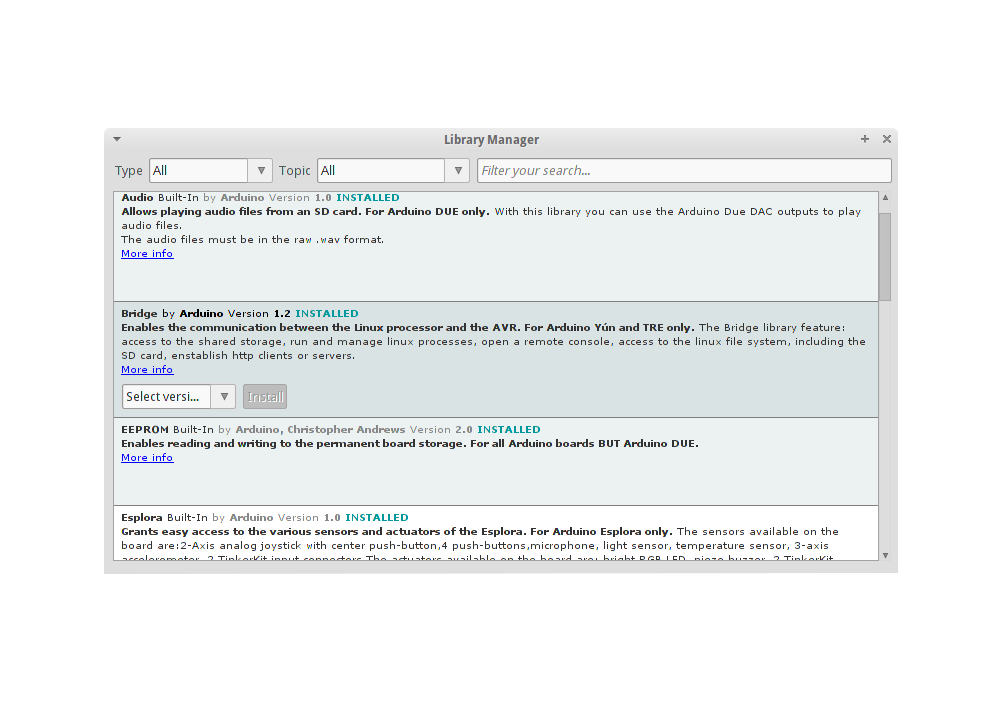
- Arduino cerebro Biblioteca (descarga aquí)
- Opcional: procesamiento cerebral Visualizer (descarga aquí, que le ayudará a tener Procesamiento también)
- Opcional (necesario para el visualizador): controlP5 Procesamiento GUI Library (descarga aquí)
Paso 1 Desmontar el auricular Mind Flex.
Coja un destornillador y abra una grieta en la vaina izquierda del auricular Mind Flex. (La vaina derecha sostiene las baterías.)

Paso 2 Soldar un trozo de alambre al pin «T».
La Junta NeuroSky es la pequeña tarjeta hija hacia la parte inferior del audífono.Si se fija bien, debería ver convenientemente etiquetado T y R pines – estas son las clavijas del tablero EEG utiliza para comunicarse en serie al microcontrolador en la placa principal, y son los pines que usaremos para espiar a los datos del cerebro . Soldar un trozo de alambre (con cuidado) a la patilla «T». Alambre fino está bien, usamos # calibre 24. Sea cuidadoso para no cortar las patillas vecinas.
Paso 3 Planta él.
Su Arduino querrá compartir terreno con el circuito Mind Flex. Soldar otra longitud de cable a tierra – cualquier punto de tierra va a hacer, pero el uso de la gran plataforma de la soldadura en la conexión a tierra de la batería llega a la junta hace el trabajo más fácil. Una nota sobre el poder: Hemos encontrado la Mente Flex sea excesivamente sensible al poder … nuestra esperanza inicial era para alimentar el tablero de NeuroSky de alimentación 3.3v del Arduino, pero esto resultó poco fiable. Por ahora estamos pegando con la configuración de fábrica y encender el Arduino y Mente Flex independiente.

Paso 4 Pase los cables.
Usamos una gota de pegamento caliente para actuar como alivio de tensión para los nuevos cables y perforamos un agujero en el caso de los dos cables que asoman a través después de que el caso fue cerrado. Este paso es opcional.
Paso 5 Conecte el Arduino.
El cable del pin «T» de la Mente Flex entra en pin RX del Arduino. La planta va … a tierra. Si lo desea, para asegurar el Arduino a un lado de la Mente Flex como una cuestión de conveniencia. (Utilizamos bridas.

Paso 6 Cargue el Arduino.
Descargar e instalar el cerebro Biblioteca Arduino – está disponible aquí. Abra el ejemplo BrainSerialOut y subirlo a su tablero. (Es posible que tenga que desconectar el pin RX durante la carga.) El código de ejemplo se ve así:

Paso 7 Probar.
A su vez en la mente Flex, asegúrese de que el Arduino está conectado al ordenador, y luego abrir el Serial Monitor. Si todo ha ido bien, debería ver lo siguiente:
Así es como la CSV se rompe: «intensidad de la señal, la atención, la meditación, delta, theta, alfa baja, alta alfa, beta baja, alta beta, gamma de baja y de alta gamma»
(Más de lo que se supone que estos valores en el sentido de adelante en el artículo Además, tenga en cuenta que si están cortando un entrenador Fuerza en lugar de una Mente Flex, sólo verá los tres primeros valores -.. Señal de fuerza, de atención y de meditación)
Si coloca la unidad sobre su cabeza, usted debe ver el valor «intensidad de la señal» gota a 0 (confusamente, esto significa que la conexión es buena), y el resto de los números comienzan a fluctuar.

Paso 8 Visualizar.
Tan emocionante como el monitor de serie es, se podría pensar, «Seguramente hay una manera más intuitiva de visualizar estos datos!» Está de suerte: al autor ha escrito un visualizador rápido, de código abierto en el procesamiento que representa gráficamente la actividad de su cerebro sobre tiempo (descargar).Está diseñado para trabajar con el código BrainSerialOut de Arduino ya cargado.
Descargar el código, a continuación, abra el archivo brain_grapher.pde en Processing. Con la mente Flex conectado a través de USB y encendido, seguir adelante y ejecutar el boceto de procesamiento. (Sólo asegúrese de que el monitor de serie el Arduino IDE ‘s es cerrado, de lo contrario Procesamiento no será capaz de leer la mente de Flex.) Puede que tenga que cambiar el índice de la lista de arreglo de serie en el archivo brain_grapher.pde, en caso de Arduino no es el primer objeto de serie de su máquina:
serie = nueva serie (esto, Serial.list () [0], 9600);
Usted debe terminar con una pantalla como esta:

Fuente aqui

Debe estar conectado para enviar un comentario.