Aunque vivimos sin duda una gran revolución con la impresión 3d, de forma silenciosa ,pero firme , también estamos viviendo un considerable avance en el mundo de las maquinas tradicionales de todo tipo (fresadoras, piro-grabadoras, dibujo, corte, láser, etc. ) , eso si ,controladas no por maquinas especificas diseñadas para su control como antaño , sino simplemente por cualquier ordenador y por potentes software de control que sin duda permite obtener resultados completamente profesionales.
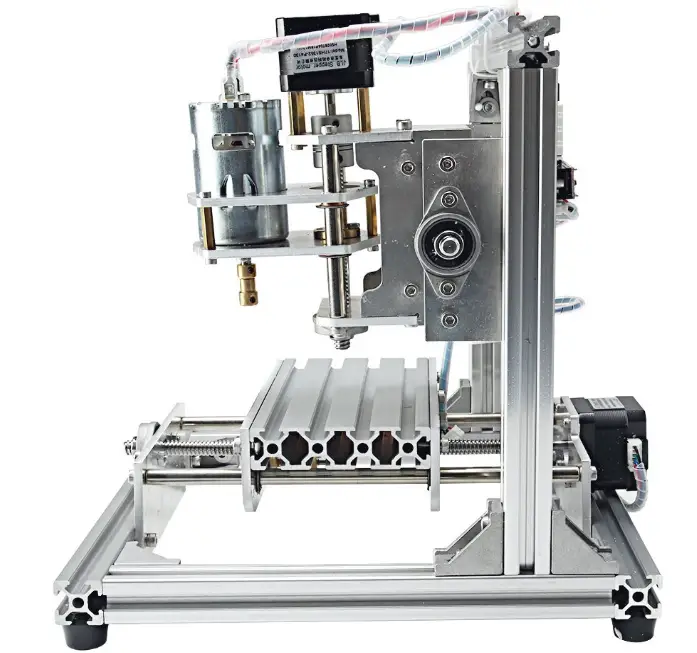
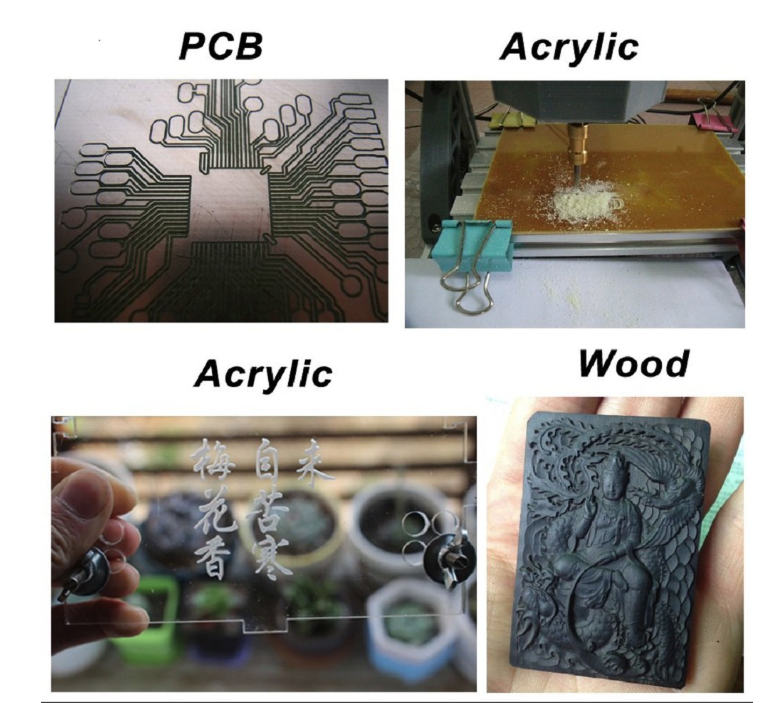
Estas maquinas conocidas como router CNC o simplemente CNC en efecto son adecuadas para tallar madera, acrílico o metal blando, madera nativa, PCB CCL, PVC y un largo etcétera lo cual permite infinidad de aplicaciones para los profesionales y también para los aficionados al bricolaje y a la electrónica dado que su precio así como también su tamaño han hecho que estén accesibles a casi todos los bolsillos .

Un router CNC se puede simplemente comprar ya montado , en kit con todos los componetes ya preparados para montarlos por uno mismo o fabricarlo por uno mismo (en la web de OpenBuilds han publicado unos interesantes vídeos sobre una maquina llamada OX y todo el proceso ), pero en todo caso su coste suele ser una fracción de lo que cuesta una impresora 3d en parte porque normalmente se va a mover sobre solo dos ejes y no requiere otras partes que añaden coste y complejidad al equipo ( un eje z largo , el extrusor o la cama caliente)
Una de las utilidades que ya comentamos en un post anterior es la posibilidad de realizar placas de circuito impreso (PCB), pero hay muchísimas opciones como cortar madera, realizar grabados , escultura y un largo etcétera

Para fabricar placas de circuito impreso con una maquina CNC comentamos en este post , el potente programa OPenCNCPilot que nos permite obtener resultado muy profesionales precisos y limpios sin usar peligrosos líquidos peligrosos, pero para otros usos , sin duda bCNC es otro programa muy versátil que permite controlar CNC que funcionen a través de arduino y que usen el firmware grbl.
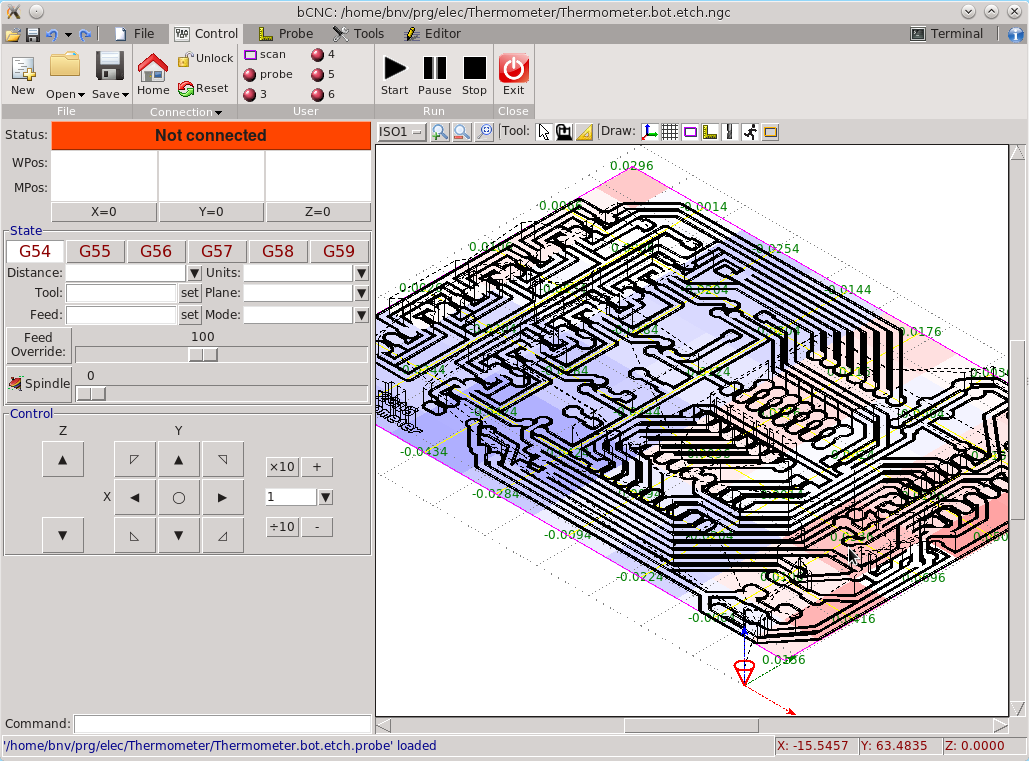
bCNC
Este programa en un gestor GRBL es un CNC command sender, autoleveler y editor de g-code
Cuenta con un emisor avanzado de códigos g para GRBL . Este programa es multiplataforma (Windows, Linux, Mac) escrito en python. El remitente es robusto y rápido capaz de trabajar muy bien con hardware antiguo o lento como Rasperry PI (como fue validado por el mainter de GRBL en pruebas pesadas) y como vamos a ver tiene infinidad de opciones.
Como no podía ser de otra manera también permite realizar placas de circuito impreso:
Instalación
El sw se puede descargar directamente desde https://github.com/vlachoudis/bCNC
Necesitará los siguientes paquetes para ejecutar bCNC
- tkinter el conjunto de herramientas gráficas para python Dependiendo de su python / OS ya puede estar instalado o bajo los nombres tkinter, python-tkinter, python-tk
- pyserial o bajo el nombre python-serial, python-pyserial
- python-image-tk: las bibliotecas PIL para el mapa de altura de autolevel (opcional)
- python-opencv: para la transmisión por webcam en el colgante web(opcional)
Expanda el directorio o descárguelo desde github y ejecute el comando bCNC
Puede modificar la mayoría de los parámetros desde la página «Herramientas -> Máquina». Solo los cambios / diferencias del archivo de configuración predeterminado se guardarán en su directorio de inicio $ {HOME} /. BCNC o ~ / .bCNC
La configuración predeterminada se almacena en bCNC.ini en el directorio de instalación. (POR FAVOR NO CAMBIE ESTE)
Menú editor Gcode
Entre sus características principales esta el editor de gcode, que nos permite hacer modificaciones sin tener que volver al software CAM.
Entre las opciones del menú de edición podemos nombrar las funciones de copiar y pegar lo que nos permite duplicar una porción del código, opciones de selección de bloques de código lo que nos facilita la edición.
El botón insertar nos permite, agregar lineas de código dentro de un bloque, clonar nos permite duplicar bloques, ademas tenemos botones para eliminar bloques, habilitar o deshabilitar bloques para que estos no se ejecuten pero sin borrarlos.
Los botones de Subir y Bajar , cambian el orden en el que se ejecuta un bloque de código,esto nos permite ordenar el gcode a nuestro gusto, y también tenemos una herramienta para invertir el orden de los bloques seleccionados.La herramienta mover nos permite cambiar la posición de los bloques simplemente seleccionando un bloque y arrastrarlo a la posición deseada. Necesaria para mover bloques que fueron clonados o copiados.El botón de establecer origen nos permite mover todo el trabajo, a la posición donde hagamos clic con el ratón.
Adicionalmente tenemos herramientas de rotar y reflejar y botones que nos permiten invertir el la dirección del corte.
Menú Herramientas
En el menú herramientas o tools tenemos la posibilidad de configurar los materiales o sustratos que usamos y guardarlos en una base de materiales y lo mismo podemos hacer con las herramientas de corte. Esto nos sirve en caso de que generemos las trayectorias directamente desde bCNC.
Ya que en bCNC es posible importar directamente vectores DXF o SVG y hasta tiene soporte para STL.
Dentro de las opciones cam, tenemos herramientas para hacer cortes, perfilados y taladrados.También podemos ahuecar una superficie, generar pestañas y aplanar superficies.
Y aqui vienen realmente las posibilidades de este programa :
E
- BOWL Bowl, sirve para generar una concavidad o como su propio nombre loo describe un bowl.
- BOX :Box es una herramienta para generar cajas con encastres como las que se encuentran en la web pero esta integrada con el programa , ademas las trayectorias generadas con para corte con fresa o con router cnc ya que compensa la circunferencia de la herramienta.Para poder generar una caja lo único que tenemos que hacer es darle los valores de altura, ancho, y profundidad ( X, Y, Z), ademas de la cantidad de encastres que queremos en cada cara y seleccionar el tipo de corte perfilado (Por fuera) , o corte (por sobre).Y por ultimo presionamos el botón ejecutar y se nos genera el g-code de nuestra caja con encastres.
- Driller:El Driller nos permite generar trayectorias de taladrado, a lo largo de un vector, como se puede ver en la imagen hemos creado una seria de taladrados a lo largo de un vector con forma de circulo.
- Aplanado (Flatten):Esta herramienta es muy simple nos permite generar una trayectoria de aplanado, con nuestro router cnc, solo tenemos que darle las coordenadas de los ejes X e Y para el inicio, y luego el alto, el ancho y la profundidad final del aplanado.Luego damos en el botón ejecutar y se nos genera el código G correspondiente.
- Gear – Generador de Engranajes:Esta opción nos permite generar engranajes, los parámetros que debemos pasarle con el numero de dientes el angulo del diente y el diámetro.
- Heightmap – Mapas de altura:Los mapas de altura son imágenes en escala de grises, que el programa interpreta como ALTOS los colores obscuros y como bajos los colores claros.Bcnc tiene la función heightmap que lo que hace es generar una trayectoria de corte a distintas profundidades generando así un relieve o corte en 3d.Pero en vez de usar un modelo 3d se pueden usar imágenes o fotografías pero para obtener buenos resultados se requiere que la imagen tenga las condiciones adecuadas de luz y sombras.
- Pyrograph – Pirograbado con router cnc: El pirograbado es similar al grabado con láser, pero en vez de utilizar un haz de luz láser para el grabado, (lo cual es bastante peligroso si no se toman las medidas de protección correspondientes ) , utilizando en su lugar una punta caliente o pirograbador. Bcnc cuenta con una herramienta para generar gcode para pirograbado, este gcode lo que hace es recorrer la imagen variando la velocidad de avance o feed rate para así lograr mayor o menor grado de quemado sobre la madera o material a grabar, sin cambiar la altura del eje Z.Para hacer una trayectoria de pirograbado necesitamos una imagen de preferencia en escala de grises, y luego pasar los parámetros.Diámetro de la punta, altura de trabajo en Z, tamaño máximo, velocidad mínima, velocidad máxima, dirección del recorrido, y la imagen a grabar.Luego damos click en execute y se nos genera el gcode correspondiente, si ven la imagen anterior parece que el gcode solo fuera un recorrido recto, pero eso es por que solo varia la velocidad de avance de la herramienta no la altura en Z.
- Spirografo – Generador de patrones espirografico.:Interesante si le gustan los espirografos….
- Text Generator – Generador de Texto para CNC o Imagen Texto:Interesante herramienta para generar texto para cortar letras con tu cnc o Láser.Solo tendremos que introducir el texto deseado elegir el archivo del tipo de fuente que queramos, establecer parámetros como anchura de los caracteres y listo.Pero esta herramienta tiene una función extra que es la capacidad de generar un texto a partir de una imagen.
Menu maquina o (machine)
En este menú tendremos la posibilidad de configurar las características de nuestro router cnc o Láser. Primero configuramos las unidades, por defecto vienen configurado para milímetros así que a menos que queramos trabajar en pulgadas no deberemos tildar la opción UNITS (INCHES).
La siguiente opción es LaserCutter esta opción solo se deberá activar si en vez de un router cnc tenemos un cortador o grabador Láser. Lo que hace esta opción es activar el uso del los comandos gcode para control de un modulo láser por ttl. Esta opción esta disponible para la versión del firmware GRBL V1.1
En los siguientes nueve parámetros podremos configurar las aceleraciones, velocidades, y recorrido máximo para cada eje de nuestro router o maquina cnc.La opción decimal digits nos permite configurar cuentos decimales le enviara el programa al firmware en los movimientos de los ejes.Luego tenemos resolución de arcos, por defecto en 0,1.
Startup es el gcode de inicio que se envía a la maquina por defecto G90 ( distancias absolutas) si queremos movimientos incrementales tenemos que poner ( G91).Spindle RPM maximas y minimas.
Y por ultimo el header gcode y footer gcode, estos son los gcodes de inicio y fin nos sirve para por ejemplo hacer que se encienda nuestro husillo y que se ajuste a las rpm deseadas antes de empezar y el de fin nos sirve para mover los ejes a una posición deseada luego de finalizado el corte o trabajo.
Control
En esta pestaña es donde vamos a pasar ms tiempo ya que aquí están todas las herramientas de control mas comunes de cualquier software para cnc.
Primero tenemos los botones para crear, abrir y guardar gcode o cualquier archivo con el que vallamos a trabajar. Ademas tenemos el botón de HOME, que lo que hace es enviar el comando G28.
Lo que hace es mover los ejes en busca de los finales de carrera, luego el botón de unlock que nos permite desbloquear nuestra maquina ( recordar que GRBL firmware tiene una opción para bloquear los movimientos de los ejes. ), y por ultimo el reset que reinicia el firmware.
Ahora le toca el turno a una de las funciones que yo mas valoro de este software, y aunque es muy simple también resulta muy util.
Scan
SCAN este botón nos permite hacer un recorrido por los margenes de nuestro vector, gcode o diseño. De modo que al presionarlo los ejes X e Y se moverán recorriendo los limites del espacio que ocupa el modelo. Esta función es muy útil cuando deseamos saber si lo que vamos a cortar, entra dentro del sustrato o de la pieza a cortar. También podremos determinar si la posición a cortar sera la que necesitamos. Hay que tener la precaución de levantar el eje Z a una posición en la que no tenga riesgos de colisionar con la pieza o algún otro obstáculo.
Debajo de scan tenemos otros botones que son 2, 3, 4, 5 y 6, estos botones son programables o personalizables aquí podemos escribir comandos.
Por ultimo los botones de control de gcode: Start inicia el corte o trabajo, pause nos permite pausar el trabajo y stop detienen el proceso que se este ejecutando. Luego tenemos el visualizador del estado de la maquina, donde veremos el estado de la conexión con el cnc, las posiciones de trabajo y las posiciones de la maquina.
Debajo de la posición de caga eje tenemos 3 botones con la inscripción X=0, Y=0 y Z=0. Estos nos permiten establecer el cero de cada eje para la posición de trabajo.
Ahora vemos la sección workspaces, donde tenemos 6 espacios de trabajo (G54, G55, G56, G57, G58 y G59) donde podremos personalizar distintas configuraciones para aplicarlas al trabajo que estemos por realizar. Aquí podremos definir valores como el el modo de desplazamiento (absoluto o incremental), las unidades de trabajo (mm o Pulgadas) plano de trabajo (XY, YZ o ZX),
Control de los ejes
Aquí tendremos acceso a los botones correspondientes al control manual de los ejes de nuestro cnc donde ademas podremos seleccionar la cantidad de unidades de desplazamiento.También vemos que podremos controlar el feed rate, al vuelo mientras estamos realizando un corte o trabajo con nuestro cnc.
Y de el mismo modo podremos acceder al control de rpm de nuestro husillo.
Visor de trabajo
A la derecha tenemos el visor del gcode o archivo que estemos por ejecutar, aquí podremos seleccionar entre distintos planos de vista, ( XY, XZ, YZ, ISO1, 2, 3).Ademas tenemos los controles de zoom in y zoom out y mostrar todo.Ahora en la sección tool tenemos la herramienta de selección que lo que nos permite es seleccionar partes de nuestro gcode para realizar acciones como eliminar o desactivarlas entre otras.b También tenemos la herramienta mover visor que lo que hace es mover la posición del modelo en el visor.
Y ahora vemos las funciones MoveGantry y Set Work Position,
- Move gantry nos permite mover con 2 click el cabezal a la posiciones de nuestro gcode que le indiquemos en el visor.Asi por ejemplo si yo hago click en move Gantry y luego hago click en el centro de mi gcode formado por 2 círculos concéntricos, los ejes X e Y se moverán hasta alcanzar la posición señalada con el puntero.Esto es muy útil por ejemplo para saber donde estará el centro de mi gcode en el material o pieza a cortar, de modo que con esta herramienta podremos movernos con 2 clics a cualquier posición de nuestro plano de visión. Tener en cuenta que los ejes se moverán de a cuerdo al plano de visión, de modo que si estamos en el plano X-Z los ejes que se moverán serán X y Z.
- SetWorkPosition;Esta botón también es uno de los mas usados en Bcnc ya que nos permite establecer la posición de trabajo de nuestros ejes con solo hacer 2 clicks.Como en el ejemplo anterior, con set work position podremos con solo 2 clicks decirle al programa que en la posición donde hicimos click es donde están posicionados nuestros ejes X e Y en este momento. Otro ejemplo de uso seria, mover nuestros ejes a una posición determinada donde queremos que quede el centro de nuestro trabajo, y luego damos click en SetWorkPosition y luego hacemos click en el centro de nuestro gcode en el visor.
Ademas en la sección Draw tenemos botones para activar o desactivar la visualización de las diferentes partes de nuestro trabajo. Primero tenemos el botón Display Axis, que lo que hace es activar o desactivar la visualización de los ejes del visor.Después tenemos Grid Lines que activa o desactiva la visualización de la cuadricula.
Display Margins lo que hace es activar o desactivar la visualización de los margenes.
Por ultimo activar o desactivar la visualización de los movimientos G1, G2 y G3 o los movimientos de corte y también tenemos un botón para desactivar los movimientos G0 o los movimientos Rápidos.
Terminal
Ademas bcnc nos provee de un terminal desde el que podremos enviar comando manuales a nuestro cnc, en grbl es muy útil por ejemplo para hacer la configuración de los valores de la eeprom. Y para dar por finalizado este recorrido por las características y herramientas de bcnc, nos vamos a la pestaña files: Aquí vamos a encontrar la configuración de la conexión con nuestra maquina, donde podremos seleccionar el puerto serie donde tenemos conectado nuestro arduino, y la velocidad de comunicación o baudrate.
Hemos recorrido la mayoría de las funciones disponibles en este estupendo software Libre para control de una CNC llamado Bcnc.




Debe estar conectado para enviar un comentario.