Un equipo del Instituto de Automatización de Sistemas Eléctricos Complejos (ACS) de la Universidad RWTH de Aquisgrán lleva un tiempo trabajando en el análisis de sistemas eléctricos ampliamente distribuidos. En su afán por alejarse de las plataformas electrónicas altamente especializadas (y costosas), han producido una instrumentación diseñada para funcionar con la plataforma Raspberry Pi y una pila de software de código abierto. La plataforma se llama SMU (Unidad de Medición Sincronizada) y consiste en un HAT situado en una RPi3, dentro de una caja impresa en 3D que está pensada para fijarse a un carril DIN (al fin y al cabo, se supone que es una plataforma industrial) .
Por supuesto el proyecto es abierto , tanto es asi que incluso está disponible los ficheros para imprimir en 3d la caja en https://git.rwth-aachen.de/acs/public/automation/smu
La tendencia al alza de los ordenadores de placa única (SBC), baratos y de alto rendimiento, ofrece cada vez más oportunidades sin precedentes en diversos ámbitos, aprovechando el amplio soporte y la flexibilidad que ofrece un entorno de sistema operativo (SO). Lamentablemente, los sistemas de adquisición de datos implementados en un entorno de SO se consideran tradicionalmente no adecuados para aplicaciones industriales fiables. Esta posición se apoya en la falta de manejo de interrupciones por hardware y de control determinista de las operaciones temporizadas. En este trabajo los autores llenan este vacío proponiendo una innovadora y versátil plataforma de código abierto basada en SBC para la adquisición de datos independiente de la CPU. La unidad de medida sincronizada (SMU) es un dispositivo de alta precisión capaz de realizar un muestreo simultáneo multicanal de hasta 200 kS/s con una precisión de sincronización de sub-microsegundos con una referencia de tiempo GPS. Presenta errores de offset y ganancia muy bajos, con un ancho de banda mínimo superior a 20 kHz, niveles de SNR superiores a 90 dB y THD tan bajos como -110 dB. Estas características hacen que la SMU sea especialmente atractiva para el ámbito de los sistemas de energía, en el que cada vez se requieren más mediciones sincronizadas para la supervisión geográficamente distribuida de las condiciones de funcionamiento de la red y los fenómenos de calidad de la energía. Presentamos la caracterización de la SMU en términos de precisión de las medidas y de la sincronización temporal, demostrando que este dispositivo, a pesar de su bajo coste, garantiza unas prestaciones que cumplen los requisitos de las aplicaciones basadas en sincrofasores en los sistemas de potencia.
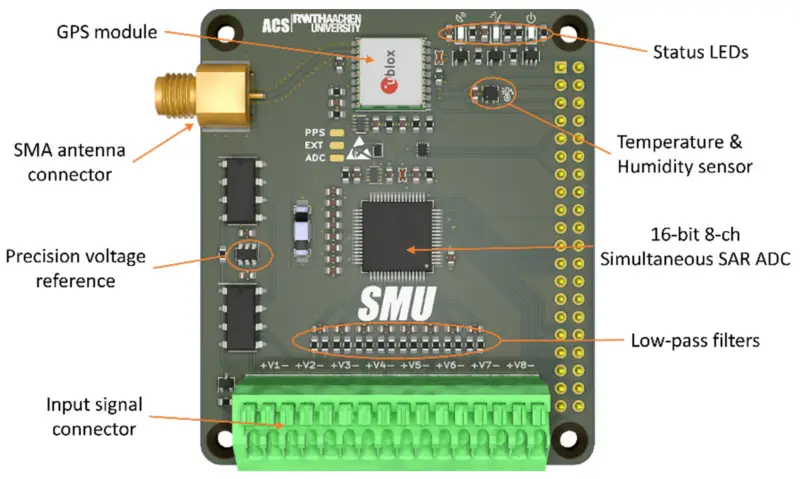
En cuanto al hardware, la estrella del espectáculo es el ADS8588S de Texas Instruments, que es un ADC de 16 bits y 8 canales de muestreo simultáneo. Es un dispositivo bastante bueno, con un rendimiento de 200 kSPS y un frontal programable por canal, empaquetado en un QFP de 64 pines fácil de usar. Sin embargo, lo que hace que este proyecto sea interesante es cómo han resuelto el problema de controlar la adquisición de datos muestreados y la sincronización.
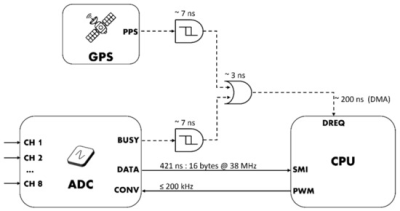
Programando el ADC en modo byte-paralelo y utilizando el bloque de interfaz de memoria secundaria (SMI) del BCM2837 junto con el DMA, las muestras se transfieren a la memoria con una sobrecarga mínima de la CPU. Un módulo GNSS U-Blox Max-M8 integrado proporciona una señal de 1PPS (pulso superior al segundo), que se combina con la señal de ocupación del ADC de forma muy sencilla, lo que permite tanto el control de la velocidad de muestreo como la sincronización entre múltiples unidades repartidas en una instalación. Calculan que pueden conseguir una sincronización con una precisión de 180 ns de la parte superior del segundo, lo que debería ser suficiente para medir sistemas de potencia que cambian con relativa lentitud. La placa de circuito impreso del HAT se creó en KiCAD y se puede encontrar en la sección de hardware de SMU GitHub, lo que hace que sea fácil de modificar según tus necesidades, o al menos ajustar el diseño para que coincida con las piezas que puedes conseguir.
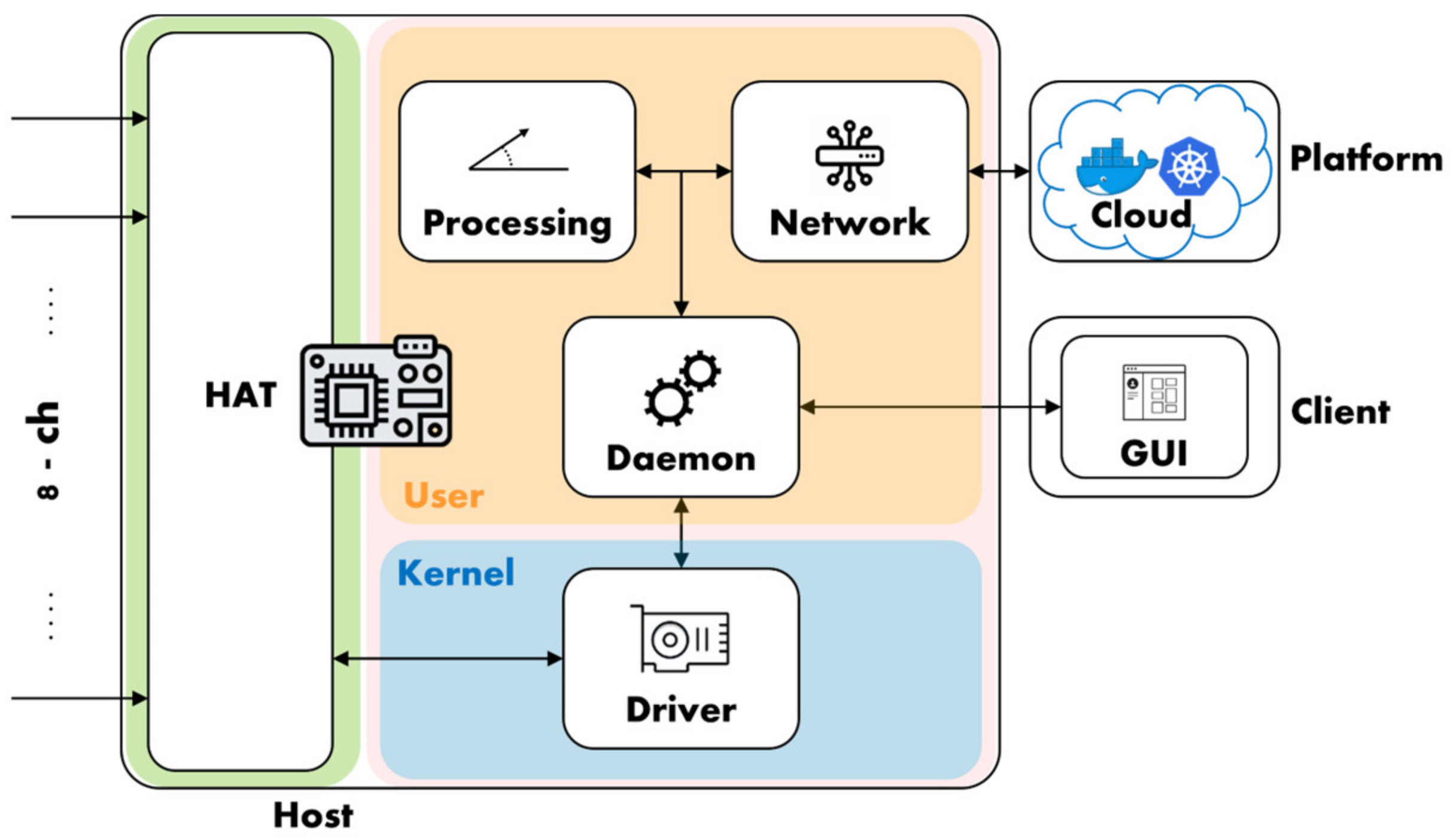
En cuanto al software, la pila completa se proporciona desde el módulo del kernel que se ocupa de las cosas de bajo nivel, ofreciendo /dev/SMU, hasta el demonio de gestión y una interfaz gráfica de usuario basada en QT. Se puede encontrar una descripción completa del sistema en el artículo de acceso abierto asociado.

Debe estar conectado para enviar un comentario.