Movistar TV lanzó ya hace algún tiempo la versión multipantalla del famoso servicio Imagenio que permite sin decodificador extra y sin coste adicional ,lógicamente a todas aquellas personas que tengan contratado el servicio Movistar TV , acceder a una a selección de los mejores canales de su televisión premium así como a toda su videoteca (películas, series y documentales en modelo de suscripción ) a través de dispositivos conectados a Internet como pueden ser tabletas, smartphones y PC’s
Gracias a este servicio se puede disfrutar de la oferta de TV en el ordenador desde cualquier navegador, pero también es posible disfrutar del servicio desde ciertos dispositivos Android y variantes gracias a la aplicación Movistar TV. Precisamente esta peculiaridad lo hace especialmente interesante para poder disfrutar de nuestra suscripción de Movistar+ en un segundo Televisor sin necesidad de descodificador siendo ideal por ejemplo para vacaciones pues siempre que tengamos conectividad , gracias a un pequeño dispositivo similar a un pincho usb (que puede comprase directamente aqui en Amazon) podremos disfrutar de todos los canales que tengamos contratados pero ademas convertiremos nuestra TV en una smart TV convertiendos nuestra TV en un completo centro de entretenimiento que permite navegar sin limitaciones por Internet, visionar videos de youtube, oir música ,ver nuestras fotos preferidas , acceder a redes sociales y un largo etcétera
Los pasos para poder disfrutar de este servicio son los siguientes:
PASO 1 : REGISTRO EN MOVISTAR TV
Para poder ver Multipantalla Movistar TV :
• Entre en http://www.movistar.es/television/go,
• Regístrese proporcionando sus datos de cliente y en un máximo de 24 horas debería recibir su clave en el correo.
• Una vez recibido el correo, no olvide activar su cuenta desde un PC o Mac, cuyo enlace aparece en ese mismo correo. Sólo una vez activada la cuenta, podrá empezar a disfrutar de los contenidos del servicio Multipantalla Movistar TV .
NOTA : Los usuarios con cuentas de Hotmail y Gmail, en caso de no recibir la clave,deberían revisar la bandeja de correo no deseado o de promociones.Si tiene duda en este link oficial puede encontrar la mayoría de las dudas o problemas que le puedan surgir en el proceso
PASO 2: PRUEBA DEL SERVICIO
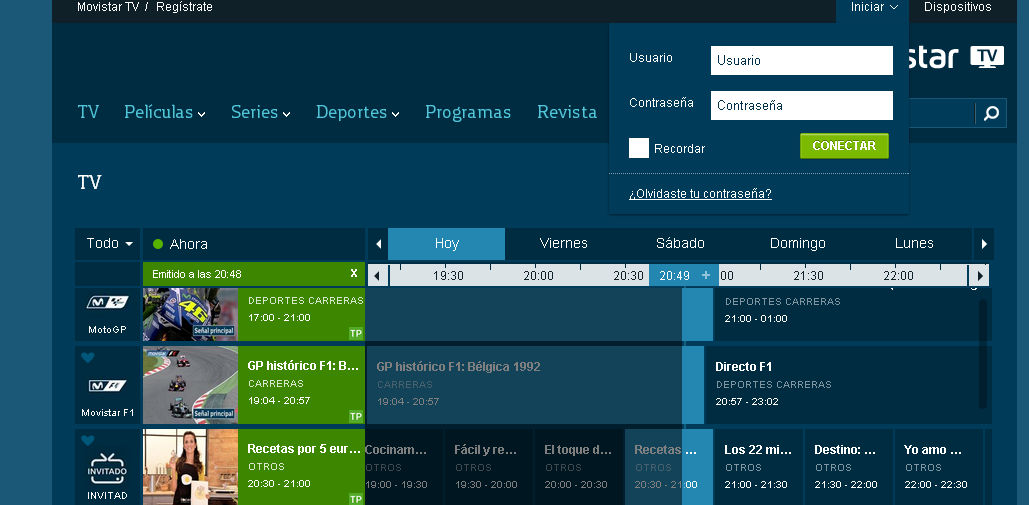
Una vez que tengamos las credenciales , antes de instalar la aplicación en un dispositivo compatible podemos probar el servicio desde un PC,Mac o IOS directamente desde su Navegador favorito accediendo a la url de yomvi.
Una vez en la página vaya a la esquina superior derecha en » Iniciar» e introduzca sus credenciales de acceso a Imagenio multipantalla obtenidos en el paso anterior( el usuario probablemente coincidirá con la cuenta de correo que utilice para acceder a Movistar).
Se recomienda, si esta usando su ordenador personal, pulsar Recordar para no tener que teclear las credenciales cada vez que quiera usar este servicio.
Una vez validado simplemente sitúese en la columna «Ahora» y pinche sobre la imagen del contenido que le interese ver.Tras un breve momento comenzará a verse en streaming ese contenido.
Tenga en cuenta que para reproducir Imagenio el equipo que utilice para probar la conexión deberá cumplir los siguientes requisitos mínimos:
- Requisitos mínimos para PC: Windows XP SP2, Windows Server 2003 SP1 o superiores; MS Silverlight player( si no lo tiene instalado al conectarse al acceder a la url , nos proporcionaran el link para su descarga) ; IE 9, Chrome 25, FireFox 20 o superiores; Pentium 233 MHz con 128 MB de RAM mínimo.
- Requisitos mínimos para MAC OS: MS Silverlight player; Safari 4; Macintosh Intel x86 o PowerPC con procesadores G3, G4, G5 y 256 MB de RAM mínimo.
- Requisitos mínimos para IOS: Certificado a partir de IPhone 4 e Ipad 2, con sistema operativo IOS 6 o superior. Con el resto de versiones pueden producirse errores.
Asimismo tendrá también disponible un amplio catálogo de películas y series gratuitas y de pago ; todo ello visible según el paquete que tenga contratado.
Paso 4: Amazon Fire TV Stick
Amazon Fire TV es uno de los dispositivos más originales de Amazon durante los últimos años. Al igual que hace Apple TV, este servicio permite llevar todo el material multimedia a un mismo punto, lo que garantiza una mayor comodidad
Para poder disfrutar del servicio Imagenio en nuestra TV gracias al Fire TV Stick podemos convertir nuestra TV en una smart TV para disfrutar de Movistar + a pantalla completa pero ademas nos permitirá navegar sin limitaciones por Internet usando un navegador que deseemos compatible con el Fire TV (Silk o Firefox) , ver videos de youtube, oir cualquier tipo de música que deseemos, ver nuestras fotos preferidas , acceder al correo de gmail o de outlook , conectarse a redes sociales y un largo etecétera
El Fire TV Stick ,dispositivo que hemos probado en este blog , pretende competir con el Chromecast y clones chinos , pero que lo cierto es que puede convertir cualquier televisor o monitor con entrada HDMI en un auténtico Smart TV
Este mini-dispositivo con procesador Quad-Core,8 GB de almacenamiento y memoria de 1 GB es suficiente potente para extender los servicios de Amazon a la TV asi como ademas disfrutar de otras
Resumidamente estas son algunas des sus posibilidades:
- Con la suscripción a Amazon Prime, se tiene acceso a Prime Video, que ofrece miles de películas y episodios de series sin ningún cargo adicional. : Elysium, TED y No Strings Attached,series Amazon Originales, que incluyen brillantes títulos de comedia, drama y familiares, como The Grand Tour, American Gods y la galardonada Man in the High Castle, solo están disponibles con Prime Video.
- Puede cargar fotos en Prime Photos sin ningún coste adicional y verlas en su televisor HD con el Fire TV Stick Basic Edition.
- Permite usarlo como plataforma de juegos causal gracias a apps disponibles en el portal de Amazon como Stranger Things: The Game, Galaxy Zero, Asphalt 8 o incluso algún Final Fantasy como el III, V o VI , estas ultimas de pago ( lo ideal usar un mando bluetooth),
- Se pueden instalar otras miles de aplicaciones directamente desde el propio dispositivo gracias a la vinculación del Fire TV Stick , con su cuenta de Amazon
- Se puede visitar también YouTube, Facebook, Reddit y millones de otros sitios web usando navegadores web como Silk o Firefox ya preinstalados en el propio stick .
- Afortunadamente no todo son servicios de Amazon en el Fire Stick pues también permiten que los usuarios accedan a otros tan populares como Netflix, Youtube, Spotify y en nuestro caso particular Movistar +
Paso 5: INSTALACIÓN Fire TV Stick
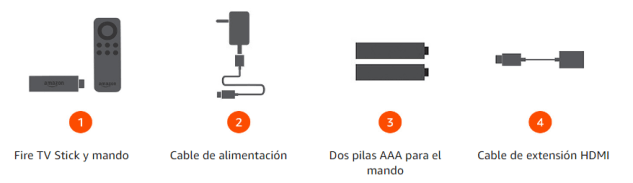
Los componentes que se incluyen con el Fire TV Stick aparte del dongle y el mando son las dos pilas para el mando y dos cables:uno para alimentarlo a 5v desde un usb ( ojo si la tv no tiene usb habrá que conectarle un adaptador usb) y un extensor de hdpi para el caso de que no entre el conector directamente en el conector del tv)
La instalación como vemos es minimalista pues en el caso ideal el dongle se conecta directamente a un conector hdmi del tv y solo requiere la alimentación que se hace por medio de cualquier conector usb que tenga el TV ( aprovechando los 5v DC de la conexión usb)
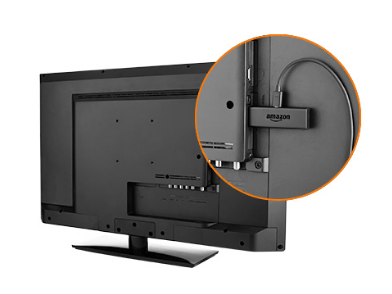
Aunque sus dimensiones son reducidas puede haber problemas a la hora de conectarlo por su anchura, para ellos a solución, usar el extensor HDMI que Amazon integra permitiendo así que el donde pueda ir en otra posición .
El Fire TV Stick viene con su propio mando que tiene todas las funciones necesarias para que use el dispositivo con total comodidad , pero para mayor comodidad lo ideal es instalar en el smartphone la apk «FIre TV«, para así poder tener un teclado más cómodo que el del Fire TV Stick
Con todo listo y conectado , una vez encendida la TV y haya cargado el sistema operativo ,en primer lugar tendremos que ir a la configuración de red para conectarnos a nuestra red wifi ( el Fire TV Stick cuenta s Wifi de doble banda y doble antena, compatible con 2×2 MIMO 802.11a/b/g/n/ac ) de modo que una vez le hayamos configurado la red y la contraseña ya todo ya estará listo
Respecto a las credenciales de Amazon nos las podemos ahorrar el introducir nuestros datos de Amazon ya que al adquirirlo incluye nuestra cuenta de Amazon ya configurada como ocurre con los Kindle ( si no queremos que ocurra tendremos que marcarlo como regalo eliminar después los datos desde el fire tv).
Como valor añadido gracias a la conectividad integrada nos ofrece la posibilidad de conectar dispositivos bluetooth como auriculares, altavoces o mandos de juegos,
Como curiosidad también puede mostrar el vídeo en espejo ( es decir girando el video 180º).
Paso 6 : Instalar aplicación de Movistar TV
Movistar+ es el servicio de entretenimiento online en español más completo del mercado donde se puede encontrar una amplia variedad de canales de cine, series, contenido infantil, documentales, programas de entretenimiento y las mejores competiciones deportivas.
Si se es cliente de Movistar+ en cualquiera de sus modalidades, es posible ver contenidos de Movistar TV también en el Fire TV Stick usadoe la app específicamente para esto que está disponible gratuitamente en Amazon o bien directamente en el acceso directo incluido en el Amazon Fire TV ,el cual instalará automáticamente ésta en el stick sin tener que usar un servicio intermedio.


Una vez descargada la aplicación, tan solo habrá que identificarse con nuestras credenciales de Movistar + ( usuario y contraseña de movistar + ) y con ello ya podremos empezar a disfrutar de los contenidos de Movistar + en una TV desde cualquier lugar donde haya conectividad gracias a este pequeño dispositivo pero que puede ser realmente útil
Paso 7: Instalar app de mando (opcional)
Una de las características laterales claras del Fire TV es una aplicación oficial que le permite usar su iPhone o Android como reemplazo del control remoto. Es particularmente útil si el control remoto de Fire TV termina ubicándose debajo del sofá, en la cocina o inexplicablemente en el retrete.
La aplicación es gratuita y también le permite hablar con su dispositivo Fire TV o Fire TV usando el micrófono de su teléfono.
Para disfrutar de Movistar+ con el Fire Stick es mas que suficiente el mando pero con la aplicación del Mando de Amazon Fire TV se mejora en gran medida el uso de las funciones y servicios de Fire TV, al ofrecer una navegación sencilla, un teclado de introducción de texto fácil (evitando la incomodidad de tener que escribir con uno o dos dedos solamente), acceso rápido a aplicaciones y juegos y búsqueda por voz.
La búsqueda por voz funciona con la misma tecnología que el motor de búsqueda por voz de Amazon Fire TV y es compatible con todos los productos integrados de Fire TV del catálogo (vídeo, aplicaciones y juegos).

Algunos trucos Amazon Fire TV Stick
El Fire TV de Amazon se ha convertido rápidamente en una de las mejores formas de convertir un televisor tonto en algo inteligente. El Fire TV Stick basic Edition , que recientemente recibió una actualización de 2017, hace que cualquier televisor habilitado para HDMI sea mucho más capaz en términos de servicios y aplicaciones, mientras que Fire Box puede tomar el lugar de una consola de juegos y ahora es capaz de transmitir 4K .
Veamos algunos ejemplos de trucos para sacarle el máximo partido a este dispositivo:
Instalar apps de Google Play
El sistema operativo del Fire TV Stick (Fire OS) de forma muy similar a otros dispositivos de Amazon está basado en Android pero no permite usar los servicios de Google ni tampoco permite instalar por defecto cualquier aplicación disponible en la Play Store,pero hay un truco para instalar otras apps en el Fire TV Stick que no estén en Amazon:
- Buscar en amazon la app «ES File Explorer» enlazando con algún servicio de almacenamiento en la nube que use (por ejemplo dropbox) .Esta app es un explorador de archivos ,es decir, se puede gestionar todo el contenido, desde copiar hasta eliminar o crear carpetas con títulos determinados.
- En el Fire TV Stick Vvya a Configuración> Sistema> Opciones de desarrollador y habilite la depuración de ADB y las aplicaciones desde fuentes desconocidas
- Buscamos en nuestro ordenador desde google la apk del la aplicación que nos interese
- Subimos el fichero apk al almacenamiento en nube
- Con «Es File Explorer» nos vamos a nuestro servicio de almacenamiento en nube y desde allí nos bajamos la app al Fire Stick
- Desde el mismo ES File Explorer da la opción de instalarlo.
- Para mayor comodidad puede descargare Apps2fire en su teléfono pues le permitirá instalar archivos APK (paquetes de aplicaciones de Android o aplicaciones de Android para usted y para mí) directamente en su Fire TV desde su teléfono.Las aplicaciones grandes tardan bastante en cargarse, por lo que es mejor configurar la pantalla de su teléfono para que se atenúe solo después de unos 10 minutos para evitar el cierre de la aplicación.
Downloader
A través de esta aplicación lo que se consigue es que “cualquier” archivo de Internet se pueda descargar. En otras palabras, imagine que quieres guardar un vídeo de Youtube en tu PC para verlo posteriormente.:pues a través de Downloader lo puede lograr.
Una vez tengas instalado Downloader podrás hacerte con Kodi, un asistente virtual que da acceso a miles de películas y series de todo el mundo gracias a las principales plataformas existentes.
Mejorar jugabilidad con un gamepad
Algunos títulos no funcionan tan bien cuando se juega con el control remoto del Fire TV. Es demasiado simplista para juegos estilo consola, pero puedes obtener un gamepad Fire TV que hace que estos títulos sean mucho más divertidos.
- GTA: San Andreas (se requiere gamepad)
- Minecraft: Edición de bolsillo (se requiere gamepad)
- Asfalto 8
- The Bard’s Tale (se requiere gamepad)
- RipTide GP2
- Star Wars: Caballeros de la Antigua República (se requiere gamepad)
Envíar música a sus auriculares Bluetooth
Fire TV es fantástico para películas en solitario a altas horas de la noche si tiene un par de auriculares Bluetooth. Puede conectar un conjunto en la parte Bluetooth de Configuración, con los dos conectados como un teléfono y los auriculares inalámbricos.
Es una característica fantástica dado lo populares que son los auriculares inalámbricos, sin embargo, muy pocos dispositivos de entretenimiento en el hogar ofrecen transmisión Bluetooth estándar; la PS4 y la Xbox One no, casi todos los televisores no, y solo los últimos receptores de home cinema lo hacen. ¡así que disfruta el hecho de que su Fire TV sí lo hace!
Reflejar la pantalla de su teléfono en el Fire TV
Un Fire TV puede tomar lo que esté en la pantalla de su teléfono y pasarlo a su televisor usando el reflejo. Sabemos que a no es una tecnología de Amazon ( es Miracast,) pero puede usarla con la mayoría de los teléfonos:simplemente mantenga presionado el botón de inicio en su control remoto de Fire TV para acceder al menú de acceso rápido, donde verá una opción de duplicación.
Ahora, solo tiene que encontrar la opción espejo correspondiente en su teléfono. Aparecerá en el menú de Configuración, y suele llamar Miracast, Mirrorshare o duplicación de pantalla, dependiendo de su modelo.
Esta funcionalidad está lejos de ser perfecta, con retraso y mucha separación de imágenes, por lo que no querrá ver una película o jugar un juego como este,pero si la conexión a Internet de su hogar es rápida tanto en las cargas como en las descargas, puede que tenga más suerte, y pueda presumir de sus últimas fotos de vacaciones desde su tv
Por cierto , si le interesa este el link de Amazon:Fire TV Stick (39,99€ para usuarios Prime)

 :
:


{kind=link}
Debe estar conectado para enviar un comentario.