La Raspberry Pi es una plataforma muy popular para la creación de prototipos, lo que hacen que sea también sea una plataformas interesante para el Internet de las Cosas (IOT) gracias a su potencia y bajo coste. Pero la construcción de un dispositivo IoT no es simplemente crear una aplicación ya que realmente se necesita una gran cantidad de infraestructura de apoyo a la solución de la IoT.
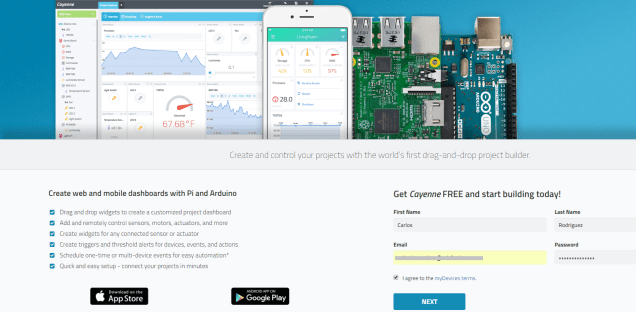
MyDevices es una empresa de orientación al IoT que desarrolla plataformas de IoT creando soluciones de aplicaciones que simplifican el mundo conectado, siendo la primera en crear una solución basada en arrastrar y soltar del mundo IoT llamada Cayenne.
Resumidamente algunas características clave de esta novedosa plataforma son las siguientes:
- Una aplicación móvil para configurar, el monitor y los dispositivos de control y sensores desde cualquier lugar.
- Fácil instalación que conecta rápidamente los dispositivos, sensores, actuadores, y las extensiones en cuestión de minutos.
- Motor de reglas para desencadenar acciones a través de dispositivos.
- Panel personalizable con widgets de visualización de arrastrar y soltar.
- Programación de las luces, motores y actuadores
- Control de GPIO que se pueden configurar desde una aplicación móvil o en el salpicadero.
- Acceso remoto instantáneo desde el teléfono o la computadora.
- Para construir un proyecto de la IO a partir de cero se ha logrado el objetivo de proporcionar un Proyecto Generador de IO que reduce el tiempo de desarrollo de horas en lugar de meses.
Como veremos , hablamos de un constructor de sitio web fácil de usar, pero para proyectos de IOT, así que veamos los pasos para crear un proyecto de IoT con esta potente herramienta usando su Raspberry Pi
Paso1
En primer lugar , si no tiene instalado Raspbian en su Raspberry Pi, tendrá que crearse una nueva imagen con esa distribución .
Para instalar Raspbian vaya a esta url . Verá que hay dos versiones:
- RASPBIAN JESSIE :Imagen de escritorio completo basado en Debian Jessie
Versión: mayo de 2016
Fecha de publicación: 27/05/2016
Versión de kernel: 4.4 - RASPBIAN JESSIE LITE:versión mínima de la imagen basada en Debian Jessie
Versión: mayo de 2016
Fecha de publicación: 27/05/2016
Versión de kernel: 4.4
Obviamente si la SD es suficiente grande , lo interesante es descargar la primera en lugar de la versión mínima
Una vez decidida, descargue la imagen correspondiente en su ordenador y siga los siguientes pasos:
- Inserte la tarjeta SD en el lector de tarjetas SD de su ordenador comprobando cual es la letra de unidad asignada. Se puede ver fácilmente la letra de la unidad, tal como G :, mirando en la columna izquierda del Explorador de Windows.
- Puede utilizar la ranura para tarjetas SD, si usted tiene uno, o un adaptador SD barato en un puerto USB.
- Descargar la utilidad Win32DiskImager desde la página del proyecto en SourceForge como un archivo zip; puede ejecutar esto desde una unidad USB.
- Extraer el ejecutable desde el archivo zip y ejecutar la utilidad Win32DiskImager; puede que tenga que ejecutar esto como administrador. Haga clic derecho en el archivo y seleccione Ejecutar como administrador.
- Seleccione el archivo de imagen que ha extraído anteriormente de Raspbian.
- Seleccione la letra de la unidad de la tarjeta SD en la caja del dispositivo. Tenga cuidado de seleccionar la unidad correcta; si usted consigue el incorrecto puede destruir los datos en el disco duro de su ordenador! Si está utilizando una ranura para tarjetas SD en su ordenador y no puede ver la unidad en la ventana Win32DiskImager, intente utilizar un adaptador SD externa.
- Haga clic en Escribir y esperar a que la escritura se complete.
- Salir del administrador de archivos y expulsar la tarjeta SD.
- Ya puede insertar la SD en su Raspberry Pi en el adaptador de micro-sd , conectar un monitor por el hdmi , conectar un teclado y ratón en los conectores USB, conectar la con un cable ethernet al router conectividad a Internet y finalmente conectar la alimentación para comprobar que la Raspeberry arranca con la nueva imagen
Paso 2:
Para comenzar la configuración de su Raspberry ,lo primero es crear una cuenta gratuita en cayenne-mydevices.com que servirá tanto para entrar en la consola web como en la aplicación movil.
Para ello, vaya a la siguiente url e introduzca simplemente su nombre ,dirección de correo y una clave de acceso que utilizara para validarse.
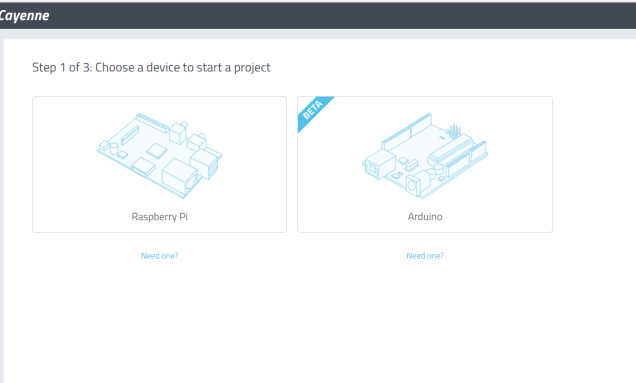
Paso 2
Una vez registrado , solamente tendrá que elegir la plataforma para avanzar en el asistente. Obviamente seleccionamos en nuestro caso Raspberry Pi.
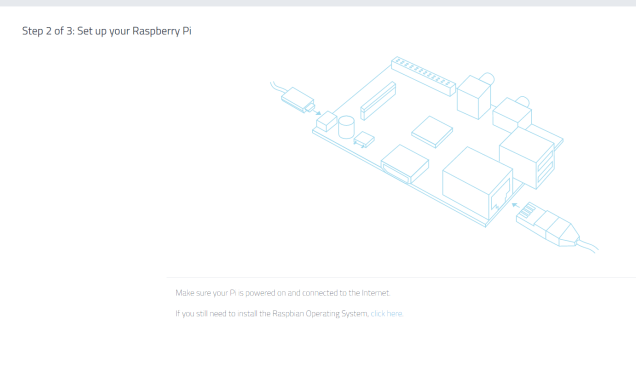
Paso 3
Para avanzar en el asistente deberemos tener instalado Raspbian en nuestra Raspberry Pi que instalamos en el paso 1 .
Esta versión trae pre-instalado con un montón de software para la educación, programación y uso general contando con Python, Scratch, Sonic Pi, Java
Es interesante destacar que Raspbian se puede instalar con NOOBS o descargando la imagen siguiendo la guía de instalación explicada en el paso 1.
paso 4

Ahora lo siguiente es instalar la aplicación móvil , que esta disponible tanto para IOS como Android.
En caso de Android este es el enlace para su descarga en Google Play
Es muy interesante destacar que desde la aplicación para el smartphone se puede automáticamente localizar e instalar el software myDevices Cayenne en su Raspberry Pi, para lo cual ambos ( smarphone y Raspberry Pi ) han de estar conectados a la misma red,por ejemplo la Raspberry Pi al router con un cable ethernet y su samartphone a la wifi de su hogar ( no funcionara si esta conectada por 3G o 4G)
Una vez instalada la app , cuando hayamos introducido nuestras credenciales , si esta la Raspberry en la misma red y no tiene instalado el agente instalara automáticamente este como podemos ver en el siguiente video
Hay otra opción de instalar myDevices Cayenne en su Raspberry Pi, usando el Terminal en su Pi o bien pr SSH.
Ejecute tan sólo los dos siguientes comandos ::
wget https://cayenne.mydevices.com/dl/rpi_f0p65dl4fs.sh
sudo bash rpi_f0p65dl4fs.sh -v
!Ya esta listo! Ya sólo tiene que empezar a conectar dispositivos y sensores a sus raspberry Pi por medio del conector GPIO y por supuesto también añadirlos en la consola de Cayenne , y con esto ya podrá ver el hw que añada en tiempo real tanto en el interfaz web como en su smartphone.
Por supuesto podrá ver el historial , programar eventos , etc, pero toda esa configuración la reservamos para un nuevo post
Por ultimo mencionar que estan ofreciendo 50 dólares a través de PayPal a cualquier usuario para cada proyecto que se suaba a Cayyene con el objetivo de mostrar que muchos, muchos usuarios vean a Cayyenne como uan aplicación práctica.
Todos los lectores de este sitio son bienvenidos a entrar, !Ademas se puede enviar varios proyectos por cada participante!
Puede consultar mas detalles de esta oportunidad en la siguinte url: http://community.mydevices.com/t/submit-your-cayenne-projects-50-just-for-participating/1158
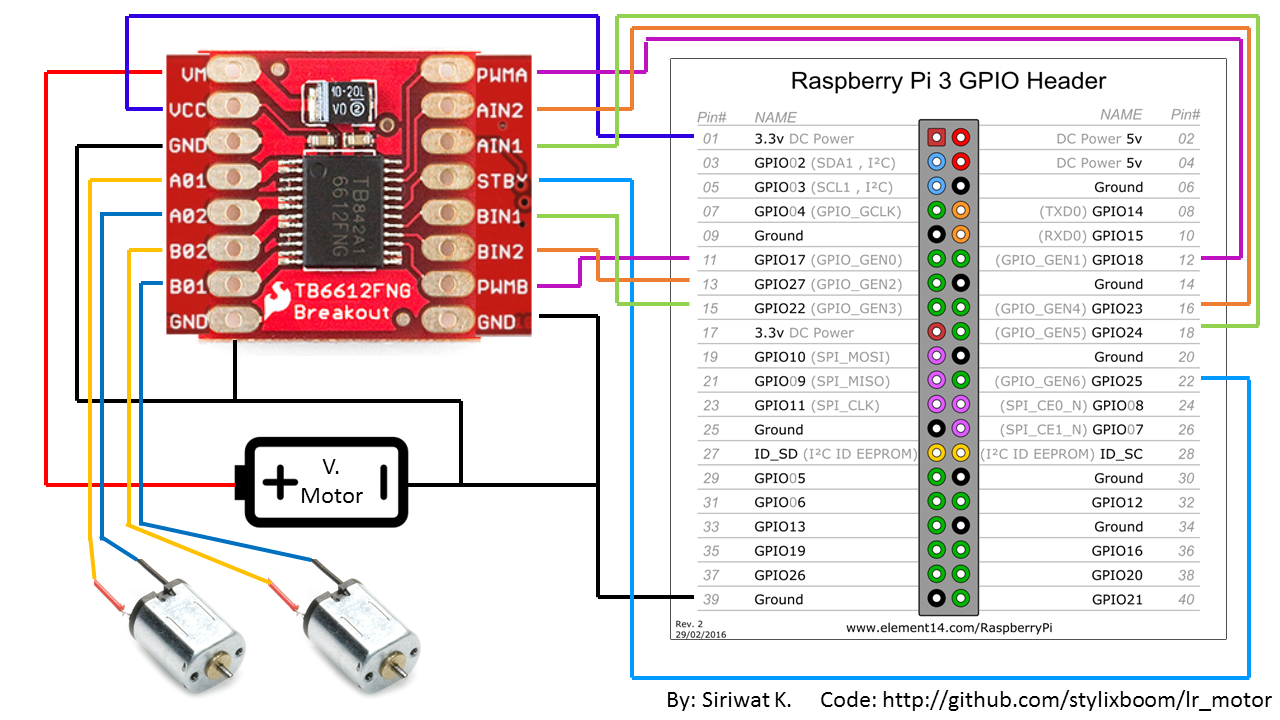 Una vez montado el circuito y ya vez tenga el código descargado (https://github.com/stylixboom/lr_motor) ,simplemente para ejecutarlo use : $ sudo node app_t.js
Una vez montado el circuito y ya vez tenga el código descargado (https://github.com/stylixboom/lr_motor) ,simplemente para ejecutarlo use : $ sudo node app_t.js
Debe estar conectado para enviar un comentario.